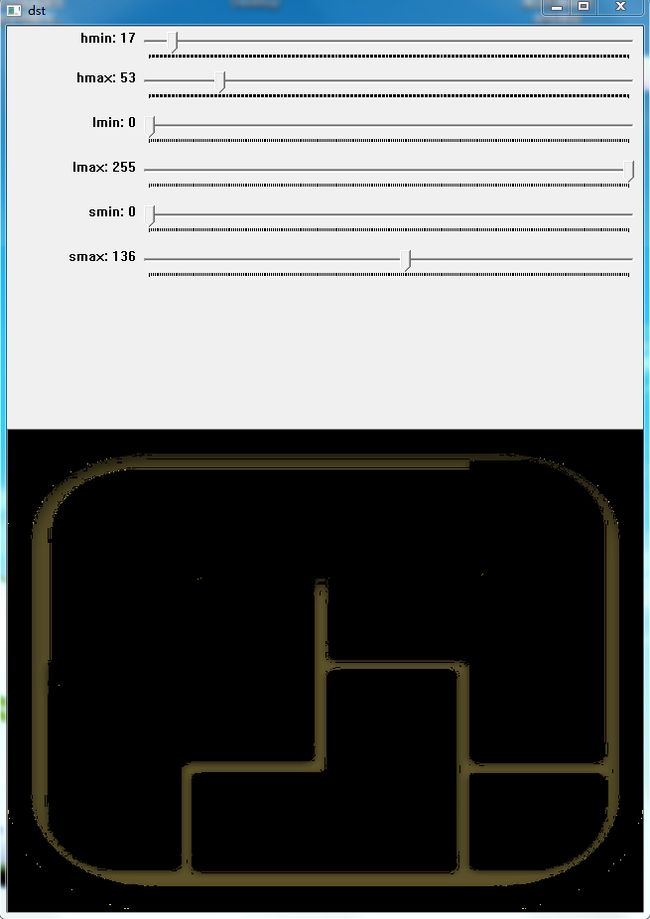
OpenCV-利用函数inRange进行颜色分割(HLS颜色分割)
利用HLS颜色空间进行图像区域的颜色分割,和利用HSV颜色空间类似:
#include
#include
#include
using namespace cv;
#include
#include
using namespace std;
//输入图像
Mat img;
//归一化图像
Mat bgr;
//HLS图像
Mat hls;
//色相
int hmin = 0;
int hmin_Max = 360;
int hmax = 360;
int hmax_Max = 360;
//亮度
int lmin = 106;
int lmin_Max = 255;
int lmax = 250;
int lmax_Max = 255;
//饱和度
int smin = 0;
int smin_Max = 255;
int smax = 255;
int smax_Max = 255;
//显示原图的窗口
string windowName = "src";
//颜色区间
string dstName = "dst";
Mat dst;//输出图像
void callBack(int, void*)
{
//输出图像
dst = Mat::zeros(bgr.size(), CV_32FC3);
//掩码
Mat mask;
inRange(hls, Scalar(hmin, lmin / float(lmin_Max), smin / float(smin_Max)), Scalar(hmax, lmax / float(lmax_Max), smax /float(smax_Max)), mask);
for (int r = 0; r < bgr.rows; r++)
{
for (int c = 0; c < bgr.cols; c++)
{
if (mask.at(r, c) == 255)
{
dst.at(r, c) = bgr.at(r, c);
}
}
}
//输出图像
imshow(dstName, dst);
//保存输出图像
//数据类型转换
dst.convertTo(dst, CV_8UC3, 255, 0);
imwrite("dst.jpg", dst);
}
int main(int argc, char*argv[])
{
//输入图像
img = imread(argv[1], IMREAD_COLOR);
if (!img.data || img.channels() != 3)
return -1;
imshow(windowName, img);
//输入图像灰度值的归一化
img.convertTo(bgr, CV_32FC3, 1.0 / 255, 0);
//颜色空间转换
cvtColor(bgr, hls, COLOR_BGR2HLS);
//输出图像
namedWindow(dstName, WINDOW_GUI_EXPANDED);
//色相
createTrackbar("hmin", dstName, &hmin, hmin_Max, callBack);
createTrackbar("hmax", dstName, &hmax, hmax_Max, callBack);
//亮度
createTrackbar("lmin", dstName, &lmin, lmin_Max, callBack);
createTrackbar("lmax", dstName, &lmax, lmax_Max, callBack);
//饱和度
createTrackbar("smin", dstName, &smin, smin_Max, callBack);
createTrackbar("smax", dstName, &smax, smax_Max, callBack);
callBack(0, 0);
waitKey(0);
return 0;
}