URDF、Xacro编写及介绍及其在RVIZ中显示与控制
文章目录
- URDF文件:
- 文件内容:
- 检查urdf语法:
- urdf图形化界面命令:
- launch文件:
- Xacro文件:
- Xacro文件解释:(参考书本)
- 用代码移动机器人:
- robot_learning_test包的依赖:
- state_publisher.cpp
- 修改cmakelists.txt文件:
- 编译运行:
- 查看话题消息的发布:
- 代码解释:
- URDF文件转Xacro文件、在rviz和gazebo中同时启动
- 自己编写的urdf文件及资料包:
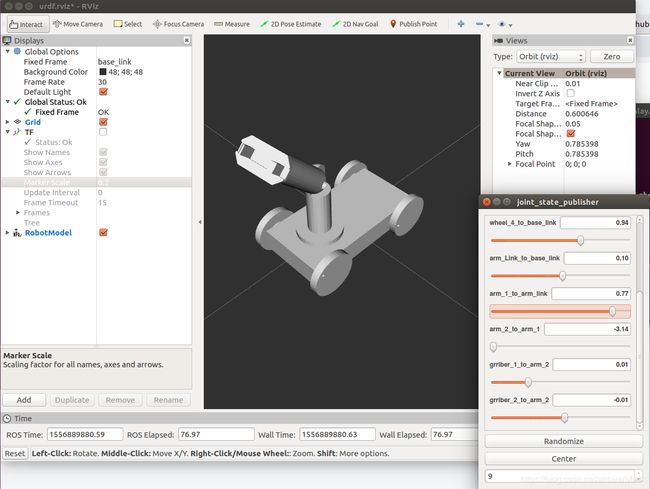
URDF文件:
移动小车,包括四个轮子+一个手臂+一个夹具
文件内容:
描述机器人几何关系的两个主要方面:links and joints。
<robot name="origins">
<link name="base_link">
<visual>
<geometry>
<box size="0.2 .3 .1"/>
</geometry>
<origin rpy="0 0 0" xyz="0 0 0.05"/>
<material name="white">
<color rgba="1 1 1 1"/>
</material>
</visual>
</link>
link:几何定义,材料定义,原点定义
link定义完成后需要定义joint
<joint name="base_to_wheel1" type="fixed">
<parent link="base_link"/>
<child link="wheel_1"/>
<origin xyz="0 0 0"/>
</joint>
joint:关节连接类型(fixed , revolute , continuous , floating , or planar)、父、子关系、
当关节类型选为revolute:需要添加limit:
例如:
<joint name="arm_1_to_arm_base" type="revolute">
<parent link="arm_base"/>
<child link="arm_1"/>
<axis xyz="1 0 0"/>
<origin xyz="0 0 0.15"/>
<limit effort ="1000.0" lower="-1.0" upper="1.0" velocity="0.5"/>
</joint>
effort (maximum force supported by the joint);
lower to assign the lower limit of a joint (radian per revolute joints, meters for prismatic joints);
upper for the upper limit;
velocity for enforcing the maximum joint velocity;
检查urdf语法:

urdf图形化界面命令:


launch文件:
<launch>
<arg name="model" />
<arg name="gui" default="true" />
<param name="robot_description" textfile="$(arg model)" />
<param name="use_gui" value="$(arg gui)" />
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="state_publisher" />
</launch>
运行命令
roslaunch robot_learning_test robot1.launch model:="`rospack find robot_learning_test`/robot_description/urdf/robot1.urdf"
也可以将urdf文件路径写到launch文件里:
<arg name="model" default="/home/ma/catkin_ws1/src/robot_learning_test/robot_description/urdf/robot1.urdf" />
修改完的运行命令为:
roslaunch robot_learning_test robot1.launch

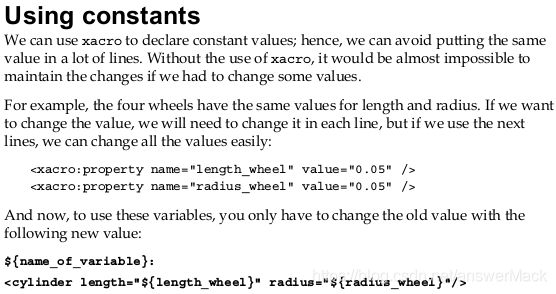
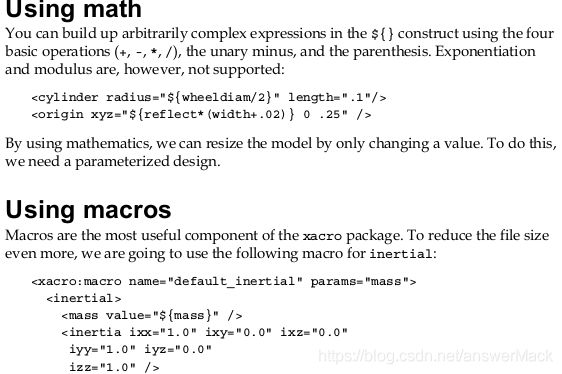
Xacro文件:
比URDF的机器人描述文件更好
Xacro文件解释:(参考书本)

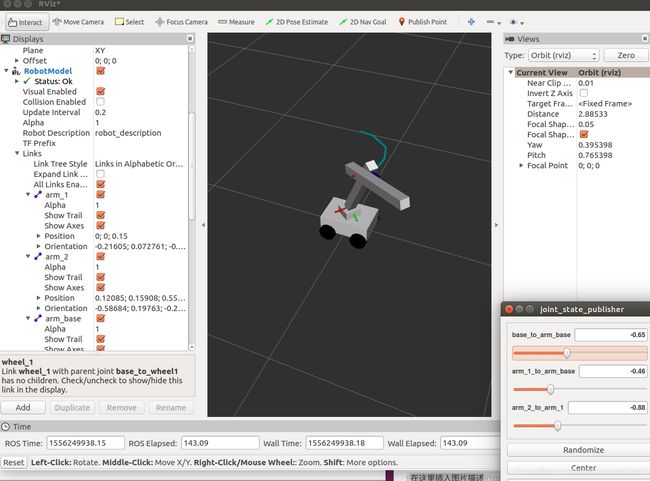
用代码移动机器人:
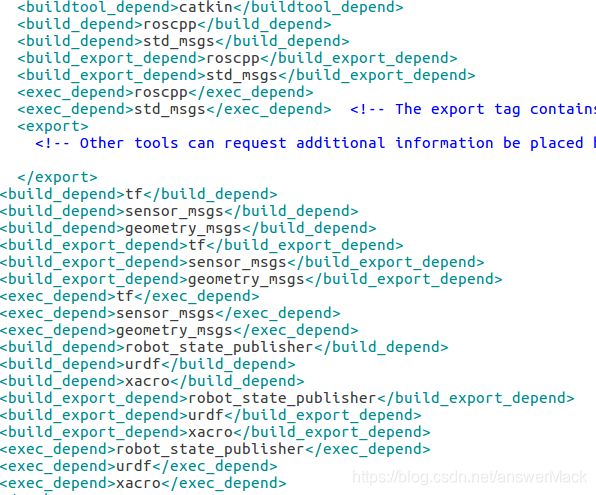
robot_learning_test包的依赖:
state_publisher.cpp
在/home/ma/catkin_ws1/src/robot_learning_test/src下
新建state_publisher.cpp
#include 修改cmakelists.txt文件:
add_executable(state_publisher src/state_publisher.cpp)
target_link_libraries(state_publisher
${catkin_LIBRARIES}
)
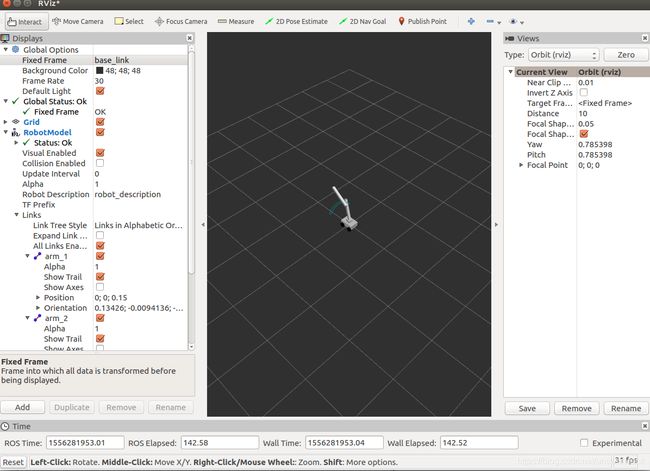
编译运行:
catkin_make
roslaunch robot_learning_test robot1.launch
rviz
rosrun robot_learning_test state_publisher
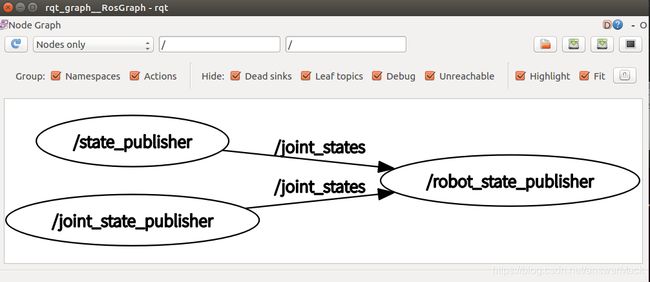
查看话题消息的发布:
rostopic list
rostopic echo /joint_states

代码解释:
待添加
20190425
20190426
20190503
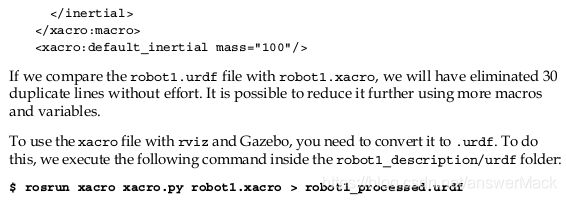
URDF文件转Xacro文件、在rviz和gazebo中同时启动
教程:
https://blog.csdn.net/answerMack/article/details/89791263
自己编写的urdf文件及资料包:
链接:https://download.csdn.net/download/answermack/11157874