|
过程控制中应用最多的,也是最基本的控制系统如图1所示。 自动控制网www.eadianqi.com版权所有 
图1 过程控制系统结构图 本文来自www.eadianqi.com
图中, 是控制器的传递函数, 是控制器的传递函数, 是执行机构的传递函数, 是执行机构的传递函数, 是测量变送器的传递函数, 是测量变送器的传递函数, 是被控对象的传递函数。图5.1中,控制器,执行机构、测量变送器都属于自动化仪表,他们都是围绕被控对象工作的。也就是说,一个过程控制的控制系统,是围绕被控现象而组成的,被控对象是控制系统的主体。因此,对被控对象的动态特性进行深入了解是过程控制的一个重要任务。只有深入了解被控对象的动态特性,了解他的内在规律,了解被控辩量在各种扰动下变化的情况,才能根据生产工艺的要求,为控制系统制定一个合理的动态性能指标,为控制系统的设计提供一个标准。性能指标顶的偏低,可能会对产品的质量、产量造成影响。性能指标顶的过高,可能会成不必要的投资和运行费用,甚至会影响到设备的寿命。性能指标确定后,设计出合理的控制方案,也离不开对被控动态特性的了解。不顾被控对象的特点,盲目进行设计,往往会导致设计的失败。尤其是一些复杂控制方案的设计,不清楚被控对象的特点根本就无法进行设计。有了正确的控制方案,控制系统中控制器,测量变送器、执行器等仪表的选择,必须已被控对象的特性为依据。在控制系统组成后,合适的控制参数的确定及控制系统的调整,也完全依赖与对被控对象动态特性的了解。由此可见,在控制工程中,了解被控制的对象是必须首先做好的一项工作。 是被控对象的传递函数。图5.1中,控制器,执行机构、测量变送器都属于自动化仪表,他们都是围绕被控对象工作的。也就是说,一个过程控制的控制系统,是围绕被控现象而组成的,被控对象是控制系统的主体。因此,对被控对象的动态特性进行深入了解是过程控制的一个重要任务。只有深入了解被控对象的动态特性,了解他的内在规律,了解被控辩量在各种扰动下变化的情况,才能根据生产工艺的要求,为控制系统制定一个合理的动态性能指标,为控制系统的设计提供一个标准。性能指标顶的偏低,可能会对产品的质量、产量造成影响。性能指标顶的过高,可能会成不必要的投资和运行费用,甚至会影响到设备的寿命。性能指标确定后,设计出合理的控制方案,也离不开对被控动态特性的了解。不顾被控对象的特点,盲目进行设计,往往会导致设计的失败。尤其是一些复杂控制方案的设计,不清楚被控对象的特点根本就无法进行设计。有了正确的控制方案,控制系统中控制器,测量变送器、执行器等仪表的选择,必须已被控对象的特性为依据。在控制系统组成后,合适的控制参数的确定及控制系统的调整,也完全依赖与对被控对象动态特性的了解。由此可见,在控制工程中,了解被控制的对象是必须首先做好的一项工作。 过程控制的被控对象设计的范围很广。被控对象不一定是指一个具体的设备,不少情况下被控对象是指一个过程。有些过程可能涉及好几种设备,而在有些设备内部可能包括了几个过程。 过程控制被控对象的内在机理较为复杂,由简单过程,又存在严重非线性的过程,有多变量过程,有些被控对象的特性随时间或工作条件而变化。对被控对象动态特性的了解,一种方法是通过分析被控对象的工作机理,建立被控对象的数学模型。但由于连续生产过程的复杂性,完全从机理上揭示其内在规律,获得精确的数学模型还有较大的困难。另一种方法是工程上经常使用的方法,它采用实验法来获得被控对象的数学模型。这种方法通过测量被控对象的阶跃相应曲线(称为飞升曲线),近似确定被控对象的数学模型,研究被控对象的动态特性。 过程控制中大多数被控对象都具有较大的惯性和时间延迟,一般不具有振荡特性,其飞升曲线是单调变化的。按照被控对象所含存贮元件的多少,被控对象可分为单容对象、双容对象和多容对象。按照被控变量受扰动后的变化规律,被控对象可分为有自平衡能力的对象和无自平衡能力的对象。 5.2.2 单容对象
单容对象是指只含有一个存贮元件的被控对象。
1. 有自平衡能力的单容元件
如果被控对象在扰动作用下偏离了原来的平衡状态,在没有外部干预的情况下(指没有自动控制或人工控制参与),被控变量依靠被控对象内部的反馈机理,能自发达到新的平衡状态,我们称这类对象是有自平衡能力的被控对象。
具有自平衡能力的单容对象的传递函数为  (5.1) (5.1)
这是个一阶惯性环节。描述这类对象的参数是时间常数T和放大系数K。 
图5.2 单容水箱 自动控制网www.eadianqi.com版权所有
图5.2是单容水箱的示意图。我们已经推导过水箱的传递函数为 自动控制网www.eadianqi.com版权所有 其中T=RC,C为水箱的横截面积,R为输出管道阀门的阻力。T称为水箱的时间常数。K称为水箱的放大系数。 一阶系统的特性我们已经在时域分析中进行了详细的讨论,所有结论都适用于单容对象。作为过程控制的被控对象,单容对象的时间常数比较大。 一阶系统的特性我们已经在时域分析中进行了详细的讨论,所有结论都适用于单容对象。作为过程控制的被控对象,单容对象的时间常数比较大。
2. 无自平衡能力的单容对象 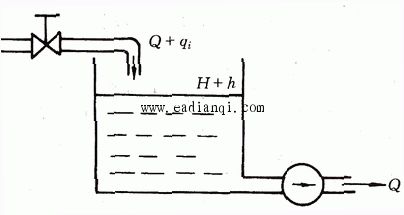
图5.3 单容积分水箱 本文来自www.eadianqi.com
图5-3也是一个单容水箱。不同的是水箱的出口侧安装了一台水泵,这样一来,水箱的流出水量就与水位无关,而是保持不变,即流出量的变化量 。在静态下,流入水箱的流量与水泵的排水量相同都为Q,水箱的水位H保持不变。在流入量有一个增量 。在静态下,流入水箱的流量与水泵的排水量相同都为Q,水箱的水位H保持不变。在流入量有一个增量 时,静态平衡被破坏,但流出量并不变化,水箱的水位变化规律为 时,静态平衡被破坏,但流出量并不变化,水箱的水位变化规律为 
式中C为水箱的横截面积。对上式两端求取拉普拉斯变换,可得水箱的传递函数: 本文来自www.eadianqi.com  (5.2) (5.2)
这是一个积分环节。它的单位阶跃响应为 


图5.4 两种水箱变化的比较
(a)单容积分水箱(b)有自平衡能力的单容水箱
图5—4(a)是水位变化的曲线。为了比较,我们把具有惯性环节特性的水箱在单位阶跃输入下的水位响应曲线也画出来,如图5—4(b)所示。很明显,具有惯性环节特性的单容水箱,在输入作用下,水位经过一个动态过程后,可以重新达到一个新的稳定状态。而具有积分环节的水箱在受到同样的扰动之后,水位则无限地上升,永远不会达到一个新的稳定状态。我们称这种水箱为单容水箱。 具有积分环节特性的单容对象的传递函数可以表示为  (5.3) (5.3)
式中 称为飞升速度。其单位阶跃响应为 本文来自www.eadianqi.com 称为飞升速度。其单位阶跃响应为 本文来自www.eadianqi.com  (5.4) (5.4)
这是一条直线方程,如图5—4(a)所示。 是直线的斜率。式(5-4)说明,当被控对象原来的平衡状态被扰动作用破坏后,如果不依靠自动控制或人工控制的外来作用,被控变量将一直变化下去,不可能达到新的平衡状态。我们称这类对象为无自平衡能力的对象。 自动控制网www.eadianqi.com版权所有 是直线的斜率。式(5-4)说明,当被控对象原来的平衡状态被扰动作用破坏后,如果不依靠自动控制或人工控制的外来作用,被控变量将一直变化下去,不可能达到新的平衡状态。我们称这类对象为无自平衡能力的对象。 自动控制网www.eadianqi.com版权所有 3单容对象的特性参数 自动控制网www.eadianqi.com版权所有 被控对象有无自平衡能力,是被控对象本身固有的特性。图5—5给出了两类水箱的方框图。图5-5(a)是有自平衡能力的单容水箱,从方框图中可以看出,水箱的水位既与流入量 有关,也受流出量 有关,也受流出量 的制约,在被控对象内部形成了一个负反馈机制。当流入量增大时,将引起水位的上升。水位上升的结果,流出量就会增加。流出量的增大又限制了水位的进一步上升。经过一个动态过程后,总能重新找到一个平衡点,使流入量与流出量相等,水位不再变化。图5-5(b)是无自平衡能力的单容水箱,在其内部不存在负反馈机制,水位只与流量有关。具有自平衡能力的被控对象,本身对扰动有一定的克服能力,控制性能较好。而无自平衡能力的被控对象,其传递函数的极点位于虚轴上,是不稳定的。被控变量若要按要求的规律变化,必须完全依赖于对象外部的控制系统。 自动控制网www.eadianqi.com版权所有 的制约,在被控对象内部形成了一个负反馈机制。当流入量增大时,将引起水位的上升。水位上升的结果,流出量就会增加。流出量的增大又限制了水位的进一步上升。经过一个动态过程后,总能重新找到一个平衡点,使流入量与流出量相等,水位不再变化。图5-5(b)是无自平衡能力的单容水箱,在其内部不存在负反馈机制,水位只与流量有关。具有自平衡能力的被控对象,本身对扰动有一定的克服能力,控制性能较好。而无自平衡能力的被控对象,其传递函数的极点位于虚轴上,是不稳定的。被控变量若要按要求的规律变化,必须完全依赖于对象外部的控制系统。 自动控制网www.eadianqi.com版权所有 
图5.5 两种类型的单容水箱
(a)有自平衡能力(b)无自平衡能力
我们曾经提到,一阶系统是含有一个存贮元件的系统。本节中我们看到,有自平衡能力无自平衡能力的对象都含有存贮元件,为什么表现出不同的特性呢?上面,我们就其内部机理进行分析。现在我们来看表征其特性的参数的异同 描述存贮元件存贮能力的参数称为对象的容量系数。容量系数可定义为 C=被控对象储存的物质或能量的变化量/输出的变化量 容量系数对不同的被控对象有不同的物理意义,如水箱的横截面积,电容器的电容量。热力系统得热容量等。在我们推导系统或环节的传递函数时,经常遇到 
T 称为系统或环节的时间常数,它是系统或环节惯性大小的量度。式中的R称为阻力系数。如电路的电阻,流体流动的液阻,传热过程的热阻等。被控对象的容量系数,表示了被控对象抵抗扰动的能力,如水箱的横截面积大,同样流入量下,水位上升得就慢。电路的电容量大,在同样充电电流下,电压上升得就慢。惯性环节的惯性,其根本原因就是因为它具有存贮能力。但这并不是决定惯性大小的唯一因素。还有另一个因素就是阻力系数。阻力系数是对流入存贮元件净流入量的制约。在R-C充电电路里,它限制了流入电容器的电流,在单容水箱中,它限制了水箱的净进水量。惯性环节因为其具备了自平衡能力,在其动态参数上,用时间常数来表示,而单容积分环节则不存在阻力系数,只用容量系数就可以表征其特性。 描述有自平衡能力单容被控对象的参数有两个:放大系数K和时间常数T,称为被控对象的特性参数。放大系数K表示输入信号通过被控对象后稳态输出是输入的K倍。对于同样的输入信号,放大系数大,对应的输出信号就大。K表示了被控对象的稳态放大能力,是被控对象的稳态参数。T是描述被控对象惯性大小的参数,时间常数T越大,被控对象在输入作用下的输出变化得越慢。T是单容被控对象的动态参数。无自平衡能力的被控对象在输入作用下不会达到新的稳定状态,描述其性能的参数只有一个动态参数:飞升速度 。 本文来自www.eadianqi.com 。 本文来自www.eadianqi.com 5.2.3 双容对象和多容对象
双容对象是指含有两个存贮元件的被控对象。有自平衡能力的双容对象,若两个存贮元件之间无负载效应,则可以认为是两个单容对象的串联,其传递函数为  (5.5) 本文来自www.eadianqi.com (5.5) 本文来自www.eadianqi.com
式中 是被控对象两个部分的时间常数,K为被控对象的放大系数。若两个存贮元件之间有关联,则传递函数为 是被控对象两个部分的时间常数,K为被控对象的放大系数。若两个存贮元件之间有关联,则传递函数为  (5.6) (5.6) 式中 是表示存贮元件关联关系的时间常数。 是表示存贮元件关联关系的时间常数。
含有两个以上存贮元件的被控对象称为多容对象。有自平衡能力的多容对象的传递函数一般有以下几种  (5.7) (5.7)
 (5.8) (5.8) 
图5.6 多容对象的阶跃响应 自动控制网www.eadianqi.com版权所有
图5.6是多容对象的阶跃响应曲线。其中,n=1是单容对象的阶跃响应曲线。从图中可以看出,从 开始的阶跃响应曲线与n=1的曲线有明显不同的特点。当t=0时,单容对象阶跃响应曲线的切线斜率最大,以后随时间增大逐渐减小到零。曲线在动态的初始阶段变化最快,以后逐渐变慢。双容对象和多容对象在t=0时,阶跃响应曲线的斜率则是零,随时间变化,斜率逐渐变大,达到某一个最大值时,又开始逐渐减小,直到减小到零。曲线在斜率最大处有一个拐点。双容对象和多容对象在动态过程的初始阶段变化非常缓慢,在动态过程的中间阶段变化较快,但其变化速度仍不及单容对象,且容量元件越多,变化速度越慢。所以,多容对象表现出的特点就是惯性大,响应慢。 开始的阶跃响应曲线与n=1的曲线有明显不同的特点。当t=0时,单容对象阶跃响应曲线的切线斜率最大,以后随时间增大逐渐减小到零。曲线在动态的初始阶段变化最快,以后逐渐变慢。双容对象和多容对象在t=0时,阶跃响应曲线的斜率则是零,随时间变化,斜率逐渐变大,达到某一个最大值时,又开始逐渐减小,直到减小到零。曲线在斜率最大处有一个拐点。双容对象和多容对象在动态过程的初始阶段变化非常缓慢,在动态过程的中间阶段变化较快,但其变化速度仍不及单容对象,且容量元件越多,变化速度越慢。所以,多容对象表现出的特点就是惯性大,响应慢。 无自平衡能力的多容对象的传递函数一般具有如下几种形式  (5.9) (5.9)
 (5.10) 本文来自www.eadianqi.com (5.10) 本文来自www.eadianqi.com
式中 称为被控对象的积分时间常数。 称为被控对象的积分时间常数。 5.2.4 多容对象传递函数的近似
建立过程控制被控对象的数学模型是一件困难的工作。控制工程中常根据被控对象的实验曲线来近似拟合被控对象的传递函数。
过程控制中阶跃输入下被控对象典型的响应曲线如图5.7所示。 
图5.7 多容对象的阶跃响应
(a)有自平衡能力的多容对象(b)无自平衡能力的多容对象 自动控制网www.eadianqi.com版权所有
图5.7(a)所显示的多容对象的传递函数,常常被近似为一阶惯性环节与延时环节的形式  (5.11) (5.11) 式(5.11)表示的被控对象是3个参数,时间常数T,放大系数K和容量延迟 ,可以通过做图法在实验曲线上求得。图5.8是求取被控对象特性参数作图方法的示意图。被控对象阶跃响应曲线的拐点D处,曲线斜率最大。在D点做曲线的切线,交时间轴于B点,与表示阶跃响应的稳态值得水平线交于A点。原点到B点的距离即为容量延迟时间 ,可以通过做图法在实验曲线上求得。图5.8是求取被控对象特性参数作图方法的示意图。被控对象阶跃响应曲线的拐点D处,曲线斜率最大。在D点做曲线的切线,交时间轴于B点,与表示阶跃响应的稳态值得水平线交于A点。原点到B点的距离即为容量延迟时间 ,直线段BA在时间轴上的投影BC即为一阶惯性环节的时间常数T。放大系数K则可以通过输出的稳态值与输入阶跃函数之比求得。式中的 ,直线段BA在时间轴上的投影BC即为一阶惯性环节的时间常数T。放大系数K则可以通过输出的稳态值与输入阶跃函数之比求得。式中的 并不代表真正的时间延迟,它是对多容对象在动态初始阶段缓慢变化的一种近似,称为容量延迟时间。如果多容对象的阶跃响应曲线本身就具有纯时间延迟 并不代表真正的时间延迟,它是对多容对象在动态初始阶段缓慢变化的一种近似,称为容量延迟时间。如果多容对象的阶跃响应曲线本身就具有纯时间延迟 ,如图5.9所示,总的延迟时间为 ,如图5.9所示,总的延迟时间为  (5.12) (5.12) 式(5.11)就变为 本文来自www.eadianqi.com  (5.13) (5.13) 
图5.8 多容对象的近似

图5.9 具有纯时间延迟的阶跃响应

图5.10 无自平衡能力多容对象的近似 本文来自www.eadianqi.com
对于图5.7(b)所示的无自平衡能力的多容对象,也可以采用类似的方法求取。图5.10是求取被控对象特性参数的示意图。做阶跃响应曲线的渐近线,于时间轴交于A点。渐近线与时间轴的交角为 。从原点到A点的距离即为被控对象的容量延迟时间 。从原点到A点的距离即为被控对象的容量延迟时间 ,而 ,而 ,被控对象的传递函数可以表示为 ,被控对象的传递函数可以表示为  (5.14) (5.14)
在过程控制中,得到被控对象的数学模型,准确了解被控对象的动态特性,与其他类型的工业控制相比,始终是一个难点:一方面研究动态特性需要精确的数学模型;另一方面连续生产过程被控对象的复杂性又难以完全从机理上揭示其内在规律。近年来适应这种情况的一些新的控制方法逐渐在过程控制中获得了应用,如模糊逻辑控制、神经网络控制等。
例1 某加热炉燃料量从2.5t/h阶跃增加到2.89t/h,炉出口烟气温度的变化曲线如图5.11所示。试求加热炉的传递函数(设加热炉是一阶环节与延迟环节串联)。
解 在曲线开始变化处作实验曲线的切线。根据曲线可以确定加热炉的稳态值 为 为  阶跃函数幅值 自动控制网www.eadianqi.com版权所有  从图上测得纯延迟时间为 |