David Silver强化学习课程笔记(八)(下)
第八课(下):基于Simulation的搜索方法
在《第八课(上):学习与规划的结合》中,我们讲到了Model-Based RL方法,在该方法中,我们首先拟合得到一个模型,然后可以利用各种规划方法进行规划,或者,可以引申出Sample-Based Planning,也即我们并不是去采用贝尔曼方程计算,而是用模型进行采样,然后利用Model-Free方法进行学习。本文中要讲的Simulation-Based Search与Sample-Based Planning有着异曲同工之妙,值得注意的是,这里的Simulation-Based Search仍然是一种结合Model-Free RL与Model-Based RL的强化学习方法。
首先,我们来理解一下,什么是Simulation-Based Search?两大要素,一是simulation,一是search。
simulation指的是用模型去采样,不过这些样本有一个共同点,就是从同一个状态开始转移,这与Sample-Based Planning是不一样的。从前面的AB Example中可以看出来我们是从随机初始化状态开始进行采样的,因为最终我们需要计算V(A)、V(B),如果仅仅从B开始转移,那么我们甚至得不到对于V(A)的估计,所以是片面的。当我们从同一个状态s开始进行了N次实验之后,我们就可以将其连成一棵以s为根节点的树,用于search。
search从字面意义来讲,就是搜索,在simulation中,我们构建了一棵以当前状态为根节点的树,并由此选择动作的过程便叫做search。
先来看看前向搜索(Forward Search)。前向搜索算法通过lookahead来选择最好的动作,这里所谓的lookahead表示从当前节点开始完全扩展,换句话说,所有情形都在里面。这种算法有一个优点:我们不用去求解整个MDP,只需要求解部分MDP(sub-MDP)即可,或者说,我们不需要对所有状态求得最优策略,而只要对当前状态求得最优策略。Forward Search示意图如下:

如果我们对此引入Simulation,则得到Simulation-Based Search,这样我们就不用构建完整的树了,而只需要从样本中学习:

这种方法表述如下:

后面我们将分别对Monte-Carlo Seach和TD search进行介绍。
Monte-Carlo Simulation/Search
我们知道,所谓Monte-Carlo方法, 是指“当所求解的问题是某种随机事件出现的概率,或者是某个随机变量的期望值时,通过某种“实验”的方法,以这种事件出现的频率估计这一随机事件的概率,或者得到这个随机变量的某些数字特征,并将其作为问题的解”。我们能够很容易地想出Monte-Carlo Simulation算法以及Monte-Carlo Search算法:
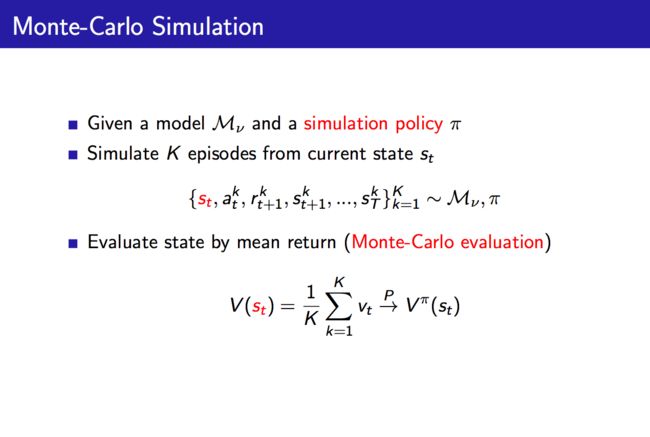

其中,估计V(s)只是叫做Simulation,而估计Q(s, a)才能叫做Search,因为我们前面说到search表示去寻找并选择最优动作的过程。如果将Monte-Carlo Search中的最后一步,也即选择real action的那一步去掉不看,那么这个算法可以看作是一个策略估计(policy evaluation)算法。需要注意的是,这里估计的策略是simulation policy,而不是real policy,real policy是最后一步得到的贪婪策略。好了,既然说到了策略估计,那我们就会想,是不是有个策略改善(policy improvement)呢?对,没错,显然我们需要对simulation policy进行改进,不然我们的real policy肯定也不咋地。比如说,假设模型是正确或者近似正确的,那么这个模型就可以被近似看做真实环境,如果我们采取的simulation policy慢慢地改进,变得越来越倾向于选择return较高的动作,则Q(s, a)也将由对于较差动作的估计变为对于较好动作的估计,比如一开始可能simulation policy里面没有较高return的action,那么Q中也就没有对这个action的估计,最后的real policy便不可能包括这个较高return的action。所以,对于simulation policy的改进最终将使得我们的real policy得到改进。下面给出Evaluation以及Improve(Simulation)的PPT:

总结Evaluation:在仿真中从现在(real)的状态开始,simulate K episodes(用simulation policy),用这些样本构造搜索树,并估计Q(s, a),选择real action来控制real agent,注意这里没有探索,是确定性策略。

总结Simulation:这页主要将improve,其中在simulation时有两种策略,当我们遇到没有见过的状态时,使用default policy,而遇到见过的策略时,则使用tree policy。我们会对tree policy进行改进,并且,得到的策略是epsilon-greedy策略,也即随机性策略。这种方法是有收敛性保证的,Q(s, a)将收敛到最优动作值函数,因而real policy将收敛到最优策略。
将Evaluation与Improve(Simulation)相结合,可以得到完整的蒙特卡罗树搜索算法(MCTS),也就是大名鼎鼎的AlphaGo中用到的核心算法。下面以围棋为例介绍树的构造过程:

PPT中讲的是V(s)的估计,也即这里考虑的是我(黑子)当前在状态s,选择一个策略,使得值函数V(s)最大,所以说是考虑某个状态s究竟有多好。不过由于我们是self-play,所以也要为对手(白子)选择最优策略。选择先在“脑子”里面simulate一个episode:
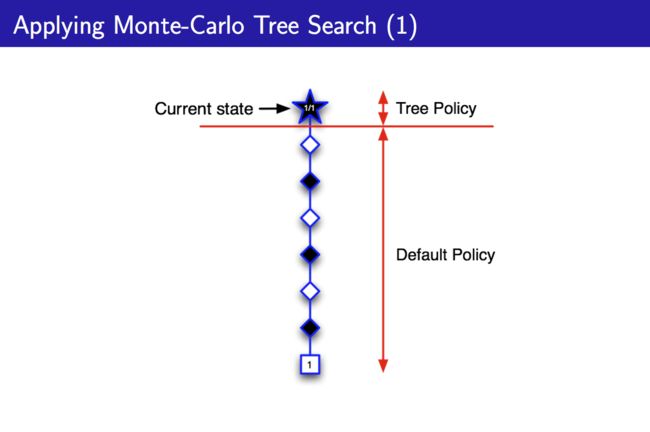
图中1/1表示下了一盘棋,并且己方(黑子)赢了,且一开始没有见过除了Current State之外的状态,所以均采用Default Policy。图中的白色块表示白子落子,虽然对于白子而言是利用某个策略来选择动作,但对于黑子而言可以当做一个状态。此时,我们见到了Current state下面的那个白色块表示的状态,所以将其加入到Tree Policy中,继续运行算法:

此时因为只有Tree Policy中只有一个白色块选择,所以就直接选这个作为后续状态,但是这个episode却不像上一步中尝试该状态时那样顺利,这次我(黑子)输了,于是我对这个状态的评估进行更新,在Tree Policy中将其值函数置为0,不再选用这个状态。由于Tree Policy是epsilon greedy的,所以可以到达另外的状态:

该状态的simulation表明,我(黑子)赢了,所以继续选择这一白色块状态,并往下搜索,将该白色块后续的黑色块加入Tree Policy中:
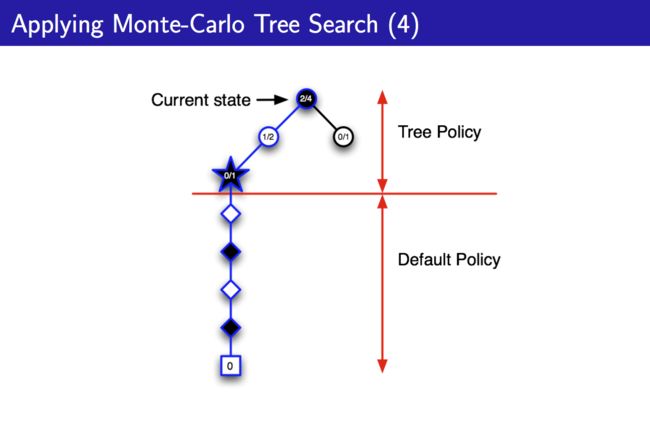
对这个黑色块进行simulation,发现输了,置其值函数为0,然后寻找另一个状态:

依此类推,得到一个Tree Policy,用于对Current state进行决策。总的来说,这种方法就是将整个对局放在心中,不过一般是一步一步来,走一步a,到s,再按照上述步骤建树,这就是MCTS。这种算法的优点为:
其中较为值得注意的是,“动态扩展树”,只评估现在的状态。
说了这么久,说的是MC Search,下面我们介绍TD Search。
TD Search也是一种Simulation-Based Search方法,与MC Search不同的是,这种方法使用TD代替了MC,有着bootstrapping的特点。在MCTS中我们从当前开始对于sub-MDP应用MC control,而TD Search则是从当前开始对sub-MDP应用Sarsa。可见,在TD Search中,每个simulation episode中都将一直更新,而不是episode结束才更新:

搜索树与值函数估计方法的联系:

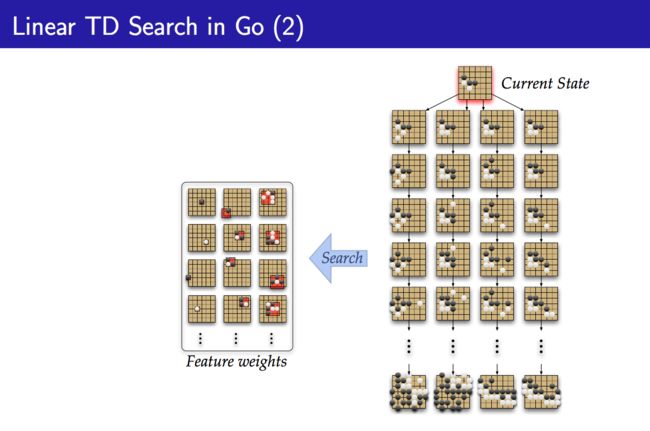
这张PPT表明,Search Tree使用的是查找表的估计方法,但与一般的model-free强化学习不同,因为它是simulation-based search,所以会稍微不那么naive,不过对于一个较大的搜索空间,值函数估计还是必要的。由此,PPT引出了Linear TD Search:

采用线性值函数估计器代替查找表估计方法,从而使之能够处理较大的搜索空间。
上一篇文章中我们讲过了Dyna结构,该结构的想法是,我们不仅仅可以从real experience中学习,我们还可以利用simulation来促进学习。Dyna-2结构的核心想法也很类似,这里我们考查Dyna-2结构:

在这种结构中,我们的智能体维持了两组权重,一组处理Long-term memory,一组处理Short-term memory(working memory)。其中Long-term memory用real experience进行更新,而Short用simulated experience进行更新,因为长期记忆一般是普适性的,所以要求比较准确,而短期记忆用于即时决策,所以用当前状态通过simulation构建得到的搜索树来进行决策。由于一组权重对应一个值函数,所以在Dyna-2中我们有两个值函数,利用real experience对应的值函数V1(s)告诉我们在实际场景中,我们所预估的期望回报,而simulated experience对应的值函数V2(s)则是从搜索树中估计得到的预期回报,这是短期的。假设我们在攀岩,那么V1(s)表明,根据以往攀岩的经历(real experience),我们当前的这个位置(某条路线上的一个点)将会触发较高的期望回报,从而给我们一个大局观;而V2(s)通过simulate后面的路线(或者说放手的位置),发现这块石头松了,不能借力,那块石头很牢固,从而给我们一个后续行为的局部引导。最终,我们的值函数是这两个值函数的和。
给出Dyna-2结构的Linear TD算法如下:



在上面4张PPT中,前两张表示从real experience中学习Long-term memory,而后两张表示从simulated experience中学习Short-term memory,从示例图中可以看出,Long-term memory学的是大局观,是从真实(real)的以往的经验中学到(learning)的,要长期记住(long-term)的东西,而Short-term memory学的是后续行为的局部引导,或者说是具体实施细节,是从虚拟(simulated)的当前(构想)的经验(或者说是样本更确切,因为说经验总像是real experience一样)搜索(search)得来的东西。整理这句话如下:
Long-term memory学的是大局观,是从真实的以往的经验中学到的,要长期记住的东西,而Short-term memory学的是后续行为的局部引导,或者说是具体实施细节,是从虚拟的当前(构想)的经验中搜索得来的东西。
好了,时间也不早了,本文就聊到这里,周末愉快~