DQN(Deep Q-Learning)
文章目录
- DQN
- DQN的架构
- DQN的算法
DQN
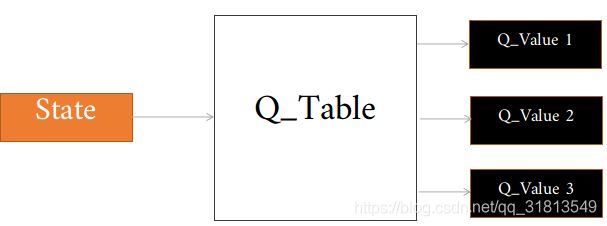
q-learning存在一个问题,真实情况的state可能无穷多,这样q-table就会无限大,解决这个问题的办法是通过神经网络实现q-table。输入state,输出不同action的q-value。
- q-leaning的执行过程:输出state,根据Q-Table输出不同action的q-value,根据探索利用策略,获取当前状态下采取的动作a.
- DQN的执行过程:输出state,根据Network输出不同action的q-value,根据探索利用策略,获取当前状态下采取的动作a.

DQN的架构
- 通过记忆库,降低观测序列之间的相关性(强化学习由于state之间的相关性存在稳定性的问题,会极大的改变策略进而改变数据分布,解决的办法是在训练的时候存储当前训练的状态到记忆体M,更新参数的时候随机从M中抽样mini-batch进行更新.M 中存储的数据类型为
- 通过Q-target的周期性固定,降低Q-target之间的相关性
基本架构:

随机抽取记忆库中的数据进行学习,打乱了经历之间的相关性,使得神经网络更新更有效率,Fixed Q-targets 使得target_net能够延迟更新参数从而也打乱了相关性。
- DQN中有两个神经网络(NN)一个参数相对固定的网络,我们叫做target-net,用来获取Q-目标(Q-target)的数值, 另外一个叫做eval_net用来获取Q-评估(Q-eval)的数值。
- 我们在训练神经网络参数时用到的损失函数(Loss function),实际上就是q_target 减 q_eval的结果 (loss = q_target- q_eval )。
- 反向传播真正训练的网络是只有一个,就是eval_net。target_net 只做正向传播得到q_target (q_target = r +γ*max Q(s,a)). 其中 Q(s,a)是若干个经过target-net正向传播的结果。
- 训练的数据是从记忆库中随机提取的,记忆库记录着每一个状态下的行动,奖励,和下一个状态的结果(s, a, r, s’)。记忆库的大小有限,当记录满了数据之后,下一个数据会覆盖记忆库中的第一个数据,记忆库就是这样覆盖更新的。
- q_target的网络target_net也会定期更新一下参数,由于target_net和eval_net的结构是一样的。更新q_target网络的参数就是直接将q_eval 的参数复制过来就行了。
DQN的算法

# import lib
import gym
import tensorflow as tf
import numpy as np
# Create the Cart-Pole game environment
env = gym.make('CartPole-v0')
# Q-network
class QNetwork:
def __init__(self, learning_rate=0.01, state_size=4,
action_size=2, hidden_size=10,
name='QNetwork'):
# state inputs to the Q-network
with tf.variable_scope(name):
self.inputs_ = tf.placeholder(tf.float32, [None, state_size], name='inputs')
# One hot encode the actions to later choose the Q-value for the action
self.actions_ = tf.placeholder(tf.int32, [None], name='actions')
one_hot_actions = tf.one_hot(self.actions_, action_size)
# Target Q values for training
self.targetQs_ = tf.placeholder(tf.float32, [None], name='target')
# ReLU hidden layers
self.fc1 = tf.contrib.layers.fully_connected(self.inputs_, hidden_size)
self.fc2 = tf.contrib.layers.fully_connected(self.fc1, hidden_size)
# Linear output layer
self.output = tf.contrib.layers.fully_connected(self.fc2, action_size,
activation_fn=None)
### Train with loss (targetQ - Q)^2
# output has length 2, for two actions. This next line chooses
# one value from output (per row) according to the one-hot encoded actions.
self.Q = tf.reduce_sum(tf.multiply(self.output, one_hot_actions), axis=1)
self.loss = tf.reduce_mean(tf.square(self.targetQs_ - self.Q))
self.opt = tf.train.AdamOptimizer(learning_rate).minimize(self.loss)
# Experience replay
from collections import deque
class Memory():
def __init__(self, max_size = 1000):
self.buffer = deque(maxlen=max_size)
def add(self, experience):
self.buffer.append(experience)
def sample(self, batch_size):
idx = np.random.choice(np.arange(len(self.buffer)),
size=batch_size,
replace=False)
return [self.buffer[ii] for ii in idx]
# hyperparameters
train_episodes = 1000 # max number of episodes to learn from
max_steps = 200 # max steps in an episode
gamma = 0.99 # future reward discount
# Exploration parameters
explore_start = 1.0 # exploration probability at start
explore_stop = 0.01 # minimum exploration probability
decay_rate = 0.0001 # exponential decay rate for exploration prob
# Network parameters
hidden_size = 64 # number of units in each Q-network hidden layer
learning_rate = 0.0001 # Q-network learning rate
# Memory parameters
memory_size = 10000 # memory capacity
batch_size = 20 # experience mini-batch size
pretrain_length = batch_size # number experiences to pretrain the memory
tf.reset_default_graph()
mainQN = QNetwork(name='main', hidden_size=hidden_size, learning_rate=learning_rate)
# Populate the experience memory
# Initialize the simulation
env.reset()
# Take one random step to get the pole and cart moving
state, reward, done, _ = env.step(env.action_space.sample())
memory = Memory(max_size=memory_size)
# Make a bunch of random actions and store the experiences
for ii in range(pretrain_length):
# Uncomment the line below to watch the simulation
# env.render()
# Make a random action
action = env.action_space.sample()
next_state, reward, done, _ = env.step(action)
if done:
# The simulation fails so no next state
next_state = np.zeros(state.shape)
# Add experience to memory
memory.add((state, action, reward, next_state))
# Start new episode
env.reset()
# Take one random step to get the pole and cart moving
state, reward, done, _ = env.step(env.action_space.sample())
else:
# Add experience to memory
memory.add((state, action, reward, next_state))
state = next_state
# Training
# Now train with experiences
saver = tf.train.Saver()
rewards_list = []
with tf.Session() as sess:
# Initialize variables
sess.run(tf.global_variables_initializer())
step = 0
for ep in range(1, train_episodes):
total_reward = 0
t = 0
while t < max_steps:
step += 1
# Uncomment this next line to watch the training
env.render()
# Explore or Exploit
explore_p = explore_stop + (explore_start - explore_stop)*np.exp(-decay_rate*step)
if explore_p > np.random.rand():
# Make a random action
action = env.action_space.sample()
else:
# Get action from Q-network
feed = {mainQN.inputs_: state.reshape((1, *state.shape))}
Qs = sess.run(mainQN.output, feed_dict=feed)
action = np.argmax(Qs)
# Take action, get new state and reward
next_state, reward, done, _ = env.step(action)
total_reward += reward
if done:
# the episode ends so no next state
next_state = np.zeros(state.shape)
t = max_steps
print('Episode: {}'.format(ep),
'Total reward: {}'.format(total_reward),
'Training loss: {:.4f}'.format(loss),
'Explore P: {:.4f}'.format(explore_p))
rewards_list.append((ep, total_reward))
# Add experience to memory
memory.add((state, action, reward, next_state))
# Start new episode
env.reset()
# Take one random step to get the pole and cart moving
state, reward, done, _ = env.step(env.action_space.sample())
else:
# Add experience to memory
memory.add((state, action, reward, next_state))
state = next_state
t += 1
# Sample mini-batch from memory
batch = memory.sample(batch_size)
states = np.array([each[0] for each in batch])
actions = np.array([each[1] for each in batch])
rewards = np.array([each[2] for each in batch])
next_states = np.array([each[3] for each in batch])
# Train network
target_Qs = sess.run(mainQN.output, feed_dict={mainQN.inputs_: next_states})
# Set target_Qs to 0 for states where episode ends
episode_ends = (next_states == np.zeros(states[0].shape)).all(axis=1)
target_Qs[episode_ends] = (0, 0)
targets = rewards + gamma * np.max(target_Qs, axis=1)
loss, _ = sess.run([mainQN.loss, mainQN.opt],
feed_dict={mainQN.inputs_: states,
mainQN.targetQs_: targets,
mainQN.actions_: actions})
saver.save(sess, "checkpoints/cartpole.ckpt")
# Testing
test_episodes = 10
test_max_steps = 400
env.reset()
with tf.Session() as sess:
saver.restore(sess, tf.train.latest_checkpoint('checkpoints'))
for ep in range(1, test_episodes):
t = 0
while t < test_max_steps:
env.render()
# Get action from Q-network
feed = {mainQN.inputs_: state.reshape((1, *state.shape))}
Qs = sess.run(mainQN.output, feed_dict=feed)
action = np.argmax(Qs)
# Take action, get new state and reward
next_state, reward, done, _ = env.step(action)
if done:
t = test_max_steps
env.reset()
# Take one random step to get the pole and cart moving
state, reward, done, _ = env.step(env.action_space.sample())
else:
state = next_state
t += 1
env.close()