Gazebo中添加Kinect相机并通过Canny边缘检测识别计算空间点坐标
Github地址https://github.com/KL-Lee/Showimg.git
最近在做机器人项目,使用ROS+Gazebo仿真环境,首先在蛇型机器人的头部添加Kinect深度相机模型。打开模型的urdf文件。添加深度相机模块。代码如下所示:
30.0
1.3962634
640
480
R8G8B8
0.02
300
true
10
camera
rgb/image_raw
depth/image_raw
depth/points
rgb/camera_info
depth/camera_info
camera_depth_optical_frame
0.1
0.0
0.0
0.0
0.0
0.0
0.4
由于对相机外观并无要求,所以直接以黑点代替。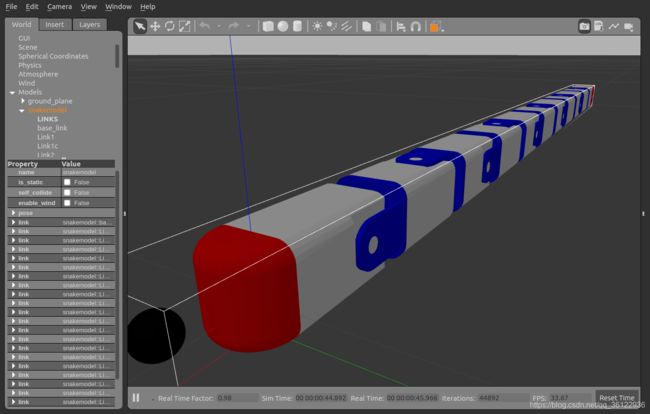
有了相机模型后,就可以直接通过ROS订阅相机RGB图像节点rgb/image_raw和深度图像节点depth/image_raw来观察相机图像信息。也可以直接运行rqt_image_view命令。我这里由于要对图像进行处理,所以使用的是自己写返回函数。订阅节点与边缘检测代码如下所示:
#include
#include
#include
#include
#include
#include
#include
#include
using namespace cv;
using namespace std;
Mat colorImg;
Mat depthImg;
int flag = 1 ;
Mat src;
Mat src_gray;
int thresh = 30;
int max_thresh = 255;
int getpix(string imgstr);
void imageCallbackrgb(const sensor_msgs::ImageConstPtr& msg)
{
try
{
cv_bridge::CvImagePtr cv_ptr;
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::BGR8);
colorImg = cv_ptr->image;
imshow("view1",colorImg);
if (flag)
{
imwrite("/home/lee/catkin_ws/src/showimg/build/test_results/color.png",colorImg);
const string imgpath = "/home/lee/catkin_ws/src/showimg/build/test_results/color.png";
getpix ( imgpath );
flag = 0;
}
cv::waitKey(1);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("Could not convert from '%s' to 'bgr8'.", msg->encoding.c_str());
}
}
void imageCallbackdepth(const sensor_msgs::ImageConstPtr& msg)
{
try
{
cv_bridge::CvImagePtr cv_ptr;
cv_ptr = cv_bridge::toCvCopy(msg, sensor_msgs::image_encodings::TYPE_32FC1);
depthImg = cv_ptr->image;
imshow("view2",depthImg);
imwrite("/home/lee/catkin_ws/src/showimg/build/test_results/depth.png",depthImg);
cv::waitKey(1);
}
catch (cv_bridge::Exception& e)
{
ROS_ERROR("Could not convert from '%s' to 'bgr8'.", msg->encoding.c_str());
}
}
int getpix(string imgstr)
{
// src = imread( "/home/lee/projects/midext/color.png" ,CV_LOAD_IMAGE_COLOR ); //注意路径得换成自己的
src = imread( imgstr ,CV_LOAD_IMAGE_COLOR );
cvtColor( src, src_gray, CV_BGR2GRAY );//灰度化
GaussianBlur( src, src, Size(3,3), 0.1, 0, BORDER_DEFAULT );
blur( src_gray, src_gray, Size(3,3) ); //滤波
namedWindow( "image", CV_WINDOW_AUTOSIZE );
imshow( "image", src );
moveWindow("image",20,20);
//定义Canny边缘检测图像
Mat canny_output;
vector > contours;
vector hierarchy;
//利用canny算法检测边缘
Canny( src_gray, canny_output, thresh, thresh*3, 3 );
namedWindow( "canny", CV_WINDOW_AUTOSIZE );
imshow( "canny", canny_output );
moveWindow("canny",550,20);
//查找轮廓
findContours( canny_output, contours, hierarchy, CV_RETR_TREE, CV_CHAIN_APPROX_SIMPLE, Point(0, 0) );
//计算轮廓矩
vector mu(contours.size() );
for( int i = 0; i < contours.size(); i++ )
{
mu[i] = moments( contours[i], false );
}
//计算轮廓的质心
vector mc( contours.size() );
for( int i = 0; i < contours.size(); i++ )
{
mc[i] = Point2d( mu[i].m10/mu[i].m00 , mu[i].m01/mu[i].m00 );
}
//画轮廓及其质心并显示
Mat drawing = Mat::zeros( canny_output.size(), CV_8UC3 );
for( int i = 0; i< contours.size(); i++ )
{
Scalar color = Scalar( 255, 0, 0);
drawContours( drawing, contours, i, color, 2, 8, hierarchy, 0, Point() );
circle( drawing, mc[i], 5, Scalar( 0, 0, 255), -1, 8, 0 );
rectangle(drawing, boundingRect(contours.at(i)), cvScalar(0,255,0));
char tam[100];
sprintf(tam, "(%0.0f,%0.0f)",mc[i].x,mc[i].y);
putText(drawing, tam, Point(mc[i].x, mc[i].y), FONT_HERSHEY_SIMPLEX, 0.4, cvScalar(255,0,255),1);
}
namedWindow( "Contours", CV_WINDOW_AUTOSIZE );
imshow( "Contours", drawing );
moveWindow("Contours",1100,20);
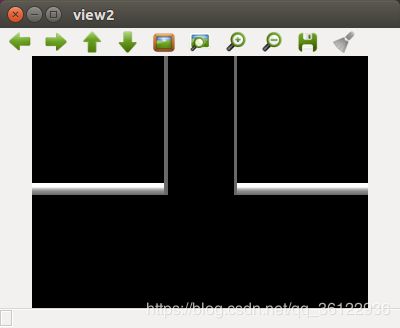
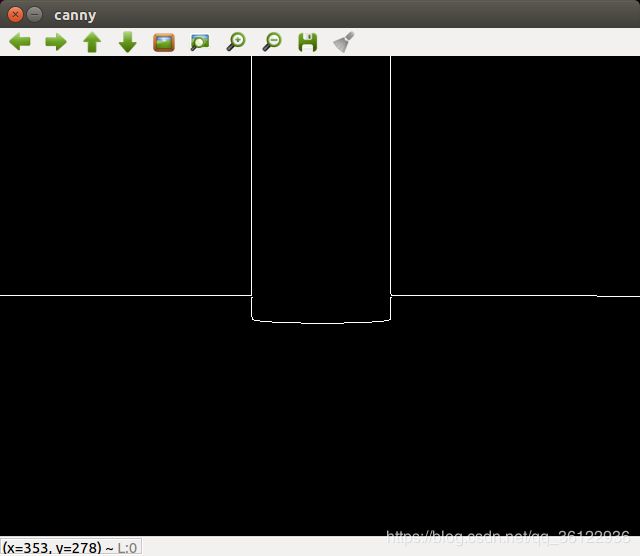
cout << "mc = :" < 最终效果如下:分别为RGB图,深度图,边缘检测图,质心坐标计算图:

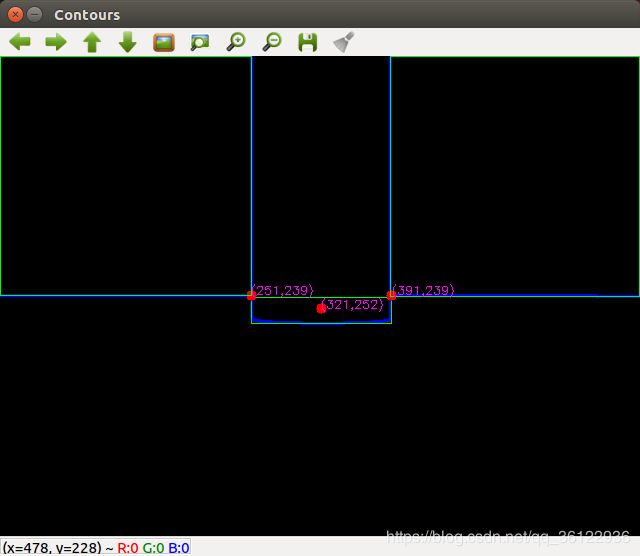
然后结合该点的像素坐标与深度距离d,通过针孔相机模型即可计算出该目标点的三维世界坐标