- Python视觉实战项目31讲源码地址
机械小蛟龙
笔记opencvpython深度学习
Python视觉实战项目31讲源码地址来源:公众号小白学视觉2月1日使用OpenCV实现猜词游戏https://github.com/spmallick/learnopencv/tree/master/Hangman使用OpenCV实现图像修复https://github.com/spmallick/learnopencv/tree/master/Image-Inpainting自适应显着性的图像
- Incremental Transformer Structure EnhancedImage Inpainting with Masking Positional Encoding笔记
毕设做完了吗?
transformer笔记深度学习
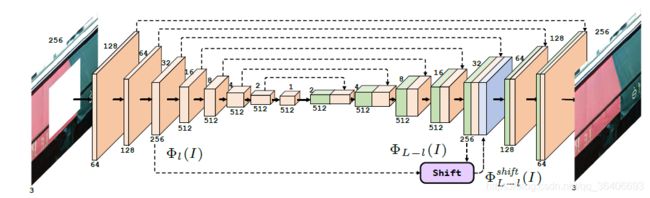
摘要:近年来,图像修复取得了重大进展。然而,恢复具有生动纹理和合理结构的损坏图像仍然具有挑战性。由于卷积神经网络(CNN)的感受野有限,一些特定方法只能处理常规纹理,同时失去整体结构。另一方面,基于注意力的模型可以更好地学习结构恢复的长程依赖性,但它们受到大图像尺寸推理的大量计算的限制。为了解决这些问题,我们建议利用一个额外的结构恢复器来促进图像的增量修复。所提出的模型在固定的低分辨率草图空间中,
- Learning to Incorporate Structure Knowledge for Image Inpainting
yijun009
图像修复论文
LearningtoIncorporateStructureKnowledgeforImageInpaintingMotivationMethods框架:AttentionLayerStructureEmbeddingLayerPyramidStructureLossExperimentreference原文链接:link.Motivation图像修复旨在用合理且充满细节的内容填充损坏的图像区域或
- 多模态图像修复系统:基于深度学习的图片修复实现
神经网络15044
仿真模型python算法深度学习人工智能
多模态图像修复系统:基于深度学习的图片修复实现1.系统概述本系统使用多模态大模型(StableDiffusionInpainting)实现图像修复功能,结合文本描述和图片输入,对指定区域进行内容修复。系统包含完整的数据处理、模型训练、推理部署流程。importtorchimportnumpyasnpfromPILimportImage,ImageDrawfromdiffusersimportSta
- 老照片修复,竟能挖出财富 “新金矿”?
晚上九点
经验分享
老照片修复,竟能挖出财富“新金矿”?情境:老照片修复的情感与市场需求在我们的记忆深处,老照片承载着珍贵的回忆。随着时间流逝,照片可能会出现褪色、破损等情况。然而,人们对留住回忆的渴望愈发强烈。近年来,老照片修复市场悄然兴起。这不禁让人好奇,老照片修复真的能成为赚钱的好门道吗?冲突:老照片修复背后的难题尽管市场前景看似广阔,但老照片修复并非一帆风顺。首先,技术门槛较高。要熟练掌握图像修复软件,如Ph
- 【CSDN首发】Stable Diffusion从零到精通学习路线分享
AI绘画月月
stablediffusion学习AI作画SD人工智能AI
文末附学习资料一、了解StableDiffusionStableDiffusion是一种开源的AI绘画软件,能够根据文本描述生成详细的图像。它主要用于图像修复、图像绘制、文本到图像和图像到图像等任务。相比其他商业AI绘画软件,StableDiffusion的优势在于开源免费,能够快速迭代和开发,且具有丰富的插件和模型。二、电脑配置电脑配置是运行StableDiffusion的基础。推荐配置包括N卡
- AI是如何修复老照片的?
人工之梦
AI随想人工智能
AI修复老照片的核心技术主要涉及深度学习和计算机视觉,具体来说,它利用神经网络来自动填补缺损、增强分辨率、恢复颜色、去除噪点等。以下是AI修复老照片的主要步骤:1.图像预处理老照片可能存在划痕、噪点、撕裂、折痕、颜色褪色等问题。在修复前,AI先对图片进行预处理:去噪:利用卷积神经网络(CNN)识别并去除噪点,提高图片质量。去划痕:使用掩膜R-CNN识别照片中的划痕,并用图像修复(Inpaintin
- WGAN+U-Net架构实现图像修复
这张生成的图像能检测吗
优质GAN模型训练自己的数据集人工智能深度学习生成对抗网络pytorch神经网络机器学习图像处理
简介简介:该论文提出了一种基于Wasserstein生成对抗网络(WGAN)的图像修复方法,使用U-Net生成器,通过对抗损失与内容损失联合训练,有效解决了传统方法对破损区域形状大小受限、修复痕迹明显的问题。在CelebA和LFW数据集上的实验表明,该方法修复效果优于现有技术,尤其对大区域和不规则破损具有鲁棒性论文题目:基于生成对抗网络的图像修复期刊:计算机科学摘要:针对现有图像补图算法中存在的损
- 【计算机视觉】CV项目实战 - Inpaint-Anything:跨模态图像修复的革命性框架
白熊188
计算机视觉计算机视觉人工智能
Inpaint-Anything:跨模态图像修复的革命性框架一、项目概览与技术突破1.1核心技术创新1.2学术贡献二、实战环境配置指南2.1硬件与系统要求2.2分步安装流程三、核心功能实战解析3.1图像对象移除(RemoveAnything)3.2文本引导填充(FillAnything)3.3视频编辑实战四、高级应用与二次开发4.13D场景编辑4.2自定义模型集成五、典型问题深度解决方案5.1内容
- EPGAN:融合高效注意力的生成对抗网络图像修复算法
这张生成的图像能检测吗
优质GAN模型训练自己的数据集人工智能深度学习计算机视觉生成对抗网络pytorch机器学习图像处理
简介简介:利用掩码设计来遮掉输入图像的一部分,将这类图像输入给生成器。生成器结合ECA注意力机制架构,利用感知损失、对抗损失和均方误差损失的加权和来作为生成器的损失计算。鉴别器分别对应掩码和整张图做损失计算。论文题目:融合高效注意力的生成对抗网络图像修复算法期刊:沈阳工程学院学报(自然科学版)摘要:针对现有图像修复算法存在细节纹理结构还原效果不佳及修复区域与图像未缺损区域
- 【深度学习新浪潮】图像修复(Image Inpainting)技术综述:定义、进展与应用展望
AndrewHZ
深度学习新浪潮图像处理算法计算机视觉深度学习人工智能图像修复LLM
本文为精简版,完整技术细节与参考文献可与作者讨论。1.图像修复的定义与核心目标图像修复(ImageInpainting)是一种通过算法手段填补图像中缺失区域或移除不需要对象的技术,其核心目标是利用图像上下文信息生成与周围像素一致且视觉自然的内容。该技术通过计算机视觉和深度学习模型,从损坏、遮挡或人为标记的区域中推断出合理的像素填充,最终实现图像的无痕修复。从数学视角看,图像修复可建模为一个逆向优化
- 提取图片颜色信息转数据信息
~夕上林~
图像处理matlab
提取图片颜色信息转数据信息背景:给定原始图片如下,数据范围为0~2π\piπ,如何通过给定图片,提取出来对应的数据信息。目录提取图片颜色信息转数据信息分析颜色模型图像预处理图像修复图片重建和裁剪提取数据分析原始图片存在两个数据图Transmittedwave和Reflectedwave,接下来将其简称为c图和d图。两数据图的颜色范围和数据范围均一致,之后以c图进行分析:项目Value长lll2.2
- 开源AI图像工具—Stable Diffusion
蚂蚁在飞-
人工智能stablediffusion
StableDiffusion是一种基于深度学习的生成式模型,用于图像生成、图像修复和风格转换等任务。它是由StabilityAI和CompVis团队联合开发的。StableDiffusion在生成高质量图像方面表现出色,并且是开源的,可以自由使用和扩展。StableDiffusion的核心技术1.扩散模型(DiffusionModels):•基于概率生成模型。•从噪声中逐步反向生成清晰的图像。•
- Python和MATLAB及C++信噪比导图(算法模型)
亚图跨际
算法交叉知识Python视频图像修复模数转换信号链噪音频谱计算量化周期性视觉刺激高斯噪声的矩形脉冲心率失常检测算法
要点视频图像修复模数转换中混合信号链噪音测量频谱计算和量化周期性视觉刺激脑电图高斯噪声的矩形脉冲总谐波失真周期图功率谱密度各种心率失常检测算法胶体悬浮液跟踪检测计算交通监控摄像头图像噪音计算Python信噪比信噪比是科学和工程中使用的一种测量方法,用于比较所需信号水平与背景噪声水平。信噪比定义为信号功率与噪声功率之比,通常以分贝表示。高于1:1(大于0dB)的比率表示信号大于噪声。信噪比是影响处理
- Photoshop 2024 mac/win版:探索图像处理的全新境界
艾雪001
photoshopmacos图像处理
Photoshop2024是Adobe推出的最新图像处理与设计软件,它在继承了前作所有优秀特性的基础上,实现了多个方面的质的飞跃。这款软件凭借其卓越的图像处理性能、丰富的创意工具以及精确的选区编辑功能,成为了图像处理领域的佼佼者。Photoshop2024mac/win获取在功能上,Photoshop2024进一步拓展了图像处理的边界。全新的AI智能识别技术,使得图像修复、色彩调整等操作更为精准高
- 图片修复去除重影导致的图像模糊
littlebird001
计算机视觉
有些图片由于焦距不准或镜头晃动通常会导致多重影模糊现象,如下图。这种模糊也叫运动型模糊,在计算机视觉中属于破损数据的一种是可以纠正修复的。传统工具PS是很难处理这类问题的,人工修复更是无法下手,需要对破损图像像素级重建。图像重建(imagerestoration)是去除错误像素建立正确像素的过程,是图像逆过程。通常可以解决去模糊、去噪音、补画等图像修复问题。我们使用去模糊算法解决重影模糊问题,进入
- 生成对抗网络 Generative Adversarial Nets(GAN)详解
Longlongaaago
机器学习论文生成对抗网络机器学习深度学习
生成对抗网络GenerativeAdversarialNets(GAN)详解近几年的很多算法创新,尤其是生成方面的task,很大一部分的文章都是结合GAN来完成的,比如,图像生成、图像修复、风格迁移等等。今天主要聊一聊GAN的原理和推导。github:http://www.github.com/goodfeli/adversarial论文:https://arxiv.org/abs/1406.26
- ESRGAN:基于GAN的增强超分辨率方法(附代码解析)
PaperWeekly
作者丨左育莘学校丨西安电子科技大学研究方向丨计算机视觉之前看的文章里有提到GAN在图像修复时更容易得到符合视觉上效果更好的图像,所以也是看了一些结合GAN的图像修复工作。ESRGAN:EnhancedSuper-ResolutionGenerativeAdversarialNetworks发表于ECCV2018的Workshops,作者在SRGAN的基础上进行了改进,包括改进网络的结构、判决器的判
- 第十八篇【传奇开心果短博文系列】Python的OpenCV库技术点案例示例:图像修复和恢复
传奇开心果编程
Python库OpenCV技术点案例示例短博文pythonopencv计算机视觉人工智能
传奇开心果短博文系列系列短博文目录Python的OpenCV库技术点案例示例系列短博文目录前言一、常用的图像修复与恢复技术二、插值方法示例代码三、基于纹理合成的方法示例代码四、基于边缘保持的方法示例代码五、基于图像修复模型的方法示例代码六、基于深度学习的方法示例代码七、基于结构化边缘的方法示例代码八、基于多帧图像的方法示例代码九、基于超分辨率的方法示例代码十、cv2.inpaint()函数修复图像
- 论文撰写八大技巧与八大心得,一文读懂
墨理学AI
版权:本文由【墨理学AI】原创、首发、各位大佬、敬请查阅声明:作为全网AI领域干货最多的博主之一,❤️不负光阴不负卿❤️日常搬砖帮老板审了不少Paper,总结一些心得分享给各位正在路上的科研小伙伴计算机视觉、超分重建、图像修复、目标检测、模型部署都在学习墨理学AI论文撰写八大技巧写论文的目的是为了发表,发表论文就需要按照论文的套路来写,不然审稿人就会以“不专业”的理由拒稿。辛辛苦苦做出来的科研成果
- 如何搭建一款AI修图工具(去路人、修复)-LamaCleaner
程序猿的Code日常
AIGC落地实践案例人工智能pythonAI作画AI编程
目录一、下载项目二、下载依赖三、运行项目四、简单实践话说十一长假到了,先祝福各位同学国庆快乐。今天我分享给大家一个炸裂的AI修图工具-LamaCleaner。它是由SOTAAI模型提供支持的图像修复工具。从照片中删除任何不需要的物体、缺陷、人物,或擦除并替换(由稳定扩散驱动)照片上的任何东西。总而言之,这个修图工具简直就是你拍照的得力助手,让你能够轻松应对各种拍摄需求,让每一张照片都完美无瑕。不管
- ESRGAN:基于GAN的增强超分辨率方法(附代码解析)
无止境x
SuperResolution(超分辨)ESRGAN
之前看的文章里有提到GAN在图像修复时更容易得到符合视觉上效果更好的图像,所以也是看了一些结合GAN的图像修复工作。ESRGAN:EnhancedSuper-ResolutionGenerativeAdversarialNetworks发表于ECCV2018的Workshops,作者在SRGAN的基础上进行了改进,包括改进网络的结构、判决器的判决形式,以及更换了一个用于计算感知域损失的预训练网络。
- 暗图像修复处理CVPR2021
墨理学AI
声明:本博文做了该代码的测试分享,敬请查阅;墨理学AI.png本文、节选自图像修复专栏专栏:图像修复-代码环境搭建-知识总结图像修复新的创作思路:CVPR2021、代码测评基本信息RestoringExtremelyDarkImagesinRealTime实时恢复极暗的图像https://github.com/MohitLamba94/Restoring-Extremely-Dark-Images
- 人工智能(pytorch)搭建模型23-pytorch搭建生成对抗网络(GAN):手写数字生成的项目应用
微学AI
(Pytorch)搭建模型人工智能pytorch生成对抗网络GAN
大家好,我是微学AI,今天给大家介绍一下人工智能(pytorch)搭建模型23-pytorch搭建生成对抗网络(GAN):手写数字生成的项目应用。生成对抗网络(GAN)是一种强大的生成模型,在手写数字生成方面具有广泛的应用前景。通过生成逼真的手写数字图像,GAN可以用于数据增强、图像修复、风格迁移等任务,提高模型的性能和泛化能力。生成对抗网络在手写数字生成领域具有广泛的应用前景。主要应用场景包括数
- 暗图像图像修复处理CVPR2021
墨理学AI
声明:本博文做了该代码的测试分享,敬请查阅;top.png图像修复专栏专栏:图像修复-代码环境搭建-知识总结敬请查阅图像修复新的创作思路:CVPR2021、代码测评基本信息RestoringExtremelyDarkImagesinRealTime实时恢复极暗的图像https://github.com/MohitLamba94/Restoring-Extremely-Dark-Images-In-
- 超越传统,想修哪里就修哪里,SUPIR如何通过文本提示实现智能图像修复
AI 研习所
AIGC大模型人工智能AIGC人工智能
项目简介通过参数增加使得模型不仅能够修复图像中的错误或损坏,还能根据文本提示进行智能修复。例如根据描述来改变图像中的特定细节。这样的处理方式提升了图像修复的质量和智能度,使得模型能够更准确、更灵活地恢复和改进图像。SUPIR的主要功能图像修复:SUPIR的核心功能是对低质量或损坏的图像进行修复,提高其视觉质量。这包括处理如模糊、噪点、色彩失真等问题,使图像恢复到高清晰度和高质量状态。文本引导的修复
- 免费交互式大模型在线图像去除水印.擦除.替换和增强照片项目代码(免费在线图像修复工具)
阿利同学
免费水印去除去除水印修复照片大模型人工智能
图像修复工具:基于SOTA人工智能模型的应用原始图:擦出不想要区域结果展示并继续擦除怎么样神奇把,水印也同样神奇的效果!!!想要了解更多,请看下文!!基于SOTA人工智能模型的应用图像修复工具:基于SOTA人工智能模型的应用一级目录二级目录三级目录一、概述二、图像修复:揭示人工智能的威力A.理解图像修复B.SOTA人工智能模型三、功能和能力A.对象移除B.缺陷修正C.人物擦除D.用于替换的稳定扩散
- 卷积神经网络入门
朱笨笨
cnn人工智能神经网络
目录前言一、卷积是什么?二、池化是什么?三、卷积神经网络4、ResNet18识别草书实战4.1数据展示4.2导入的库4.3数据预处理部分4.4切割数据集并定义数据加载器4.5训练网络4.6可视化损失函数、精度变化总结前言近年来,卷积神经网络(Convolutionalneuralnetworks,CNN)已在图像理解领域得到了广泛的应用。而且作者最近再想试着用CNN来搞图像修复,所以先浅学了一下。
- 精度提升10个点!HD-Painter:无需训练的文本引导高分辨率图像修复方案!
AI生成未来
AIGCAIGC局部重绘图片修复
基于文本到图像扩散模型的空前成功,在文本引导的图像修复方面取得了最新进展,取得了异常逼真和视觉上可靠的结果。然而,目前的文本到图像修复模型仍然存在显著的改进潜力,特别是在更好地与用户提示对齐和执行高分辨率修复方面。因此,在本文中,介绍了HD-Painter,这是一种完全无需训练的方法,能够准确地遵循提示并一致地扩展到高分辨率图像修复。为此,本文设计了Prompt-AwareIntrovertedA
- 数据在AI图像修复任务中的核心作用
人工智能的光信号
人工智能
在人工智能(AI)领域,数据的重要性不言而喻。尤其在图像修复任务中,数据的精度和质量直接影响着AI模型的性能。图像修复是指利用AI技术自动识别图像中的缺陷或遮挡物,并对其进行修复或还原的过程。这项技术广泛应用于各种领域,如历史文物数字化修复、影视剧制作、人脸美颜等。人工智能的学习之路非常漫长,不少人因为学习路线不对或者学习内容不够专业而举步难行。不过别担心,我为大家整理了一份600多G的学习资源,
- java封装继承多态等
麦田的设计者
javaeclipsejvmcencapsulatopn
最近一段时间看了很多的视频却忘记总结了,现在只能想到什么写什么了,希望能起到一个回忆巩固的作用。
1、final关键字
译为:最终的
&
- F5与集群的区别
bijian1013
weblogic集群F5
http请求配置不是通过集群,而是F5;集群是weblogic容器的,如果是ejb接口是通过集群。
F5同集群的差别,主要还是会话复制的问题,F5一把是分发http请求用的,因为http都是无状态的服务,无需关注会话问题,类似
- LeetCode[Math] - #7 Reverse Integer
Cwind
java题解MathLeetCodeAlgorithm
原题链接:#7 Reverse Integer
要求:
按位反转输入的数字
例1: 输入 x = 123, 返回 321
例2: 输入 x = -123, 返回 -321
难度:简单
分析:
对于一般情况,首先保存输入数字的符号,然后每次取输入的末位(x%10)作为输出的高位(result = result*10 + x%10)即可。但
- BufferedOutputStream
周凡杨
首先说一下这个大批量,是指有上千万的数据量。
例子:
有一张短信历史表,其数据有上千万条数据,要进行数据备份到文本文件,就是执行如下SQL然后将结果集写入到文件中!
select t.msisd
- linux下模拟按键输入和鼠标
被触发
linux
查看/dev/input/eventX是什么类型的事件, cat /proc/bus/input/devices
设备有着自己特殊的按键键码,我需要将一些标准的按键,比如0-9,X-Z等模拟成标准按键,比如KEY_0,KEY-Z等,所以需要用到按键 模拟,具体方法就是操作/dev/input/event1文件,向它写入个input_event结构体就可以模拟按键的输入了。
linux/in
- ContentProvider初体验
肆无忌惮_
ContentProvider
ContentProvider在安卓开发中非常重要。与Activity,Service,BroadcastReceiver并称安卓组件四大天王。
在android中的作用是用来对外共享数据。因为安卓程序的数据库文件存放在data/data/packagename里面,这里面的文件默认都是私有的,别的程序无法访问。
如果QQ游戏想访问手机QQ的帐号信息一键登录,那么就需要使用内容提供者COnte
- 关于Spring MVC项目(maven)中通过fileupload上传文件
843977358
mybatisspring mvc修改头像上传文件upload
Spring MVC 中通过fileupload上传文件,其中项目使用maven管理。
1.上传文件首先需要的是导入相关支持jar包:commons-fileupload.jar,commons-io.jar
因为我是用的maven管理项目,所以要在pom文件中配置(每个人的jar包位置根据实际情况定)
<!-- 文件上传 start by zhangyd-c --&g
- 使用svnkit api,纯java操作svn,实现svn提交,更新等操作
aigo
svnkit
原文:http://blog.csdn.net/hardwin/article/details/7963318
import java.io.File;
import org.apache.log4j.Logger;
import org.tmatesoft.svn.core.SVNCommitInfo;
import org.tmateso
- 对比浏览器,casperjs,httpclient的Header信息
alleni123
爬虫crawlerheader
@Override
protected void doGet(HttpServletRequest req, HttpServletResponse res) throws ServletException, IOException
{
String type=req.getParameter("type");
Enumeration es=re
- java.io操作 DataInputStream和DataOutputStream基本数据流
百合不是茶
java流
1,java中如果不保存整个对象,只保存类中的属性,那么我们可以使用本篇文章中的方法,如果要保存整个对象 先将类实例化 后面的文章将详细写到
2,DataInputStream 是java.io包中一个数据输入流允许应用程序以与机器无关方式从底层输入流中读取基本 Java 数据类型。应用程序可以使用数据输出流写入稍后由数据输入流读取的数据。
- 车辆保险理赔案例
bijian1013
车险
理赔案例:
一货运车,运输公司为车辆购买了机动车商业险和交强险,也买了安全生产责任险,运输一车烟花爆竹,在行驶途中发生爆炸,出现车毁、货损、司机亡、炸死一路人、炸毁一间民宅等惨剧,针对这几种情况,该如何赔付。
赔付建议和方案:
客户所买交强险在这里不起作用,因为交强险的赔付前提是:“机动车发生道路交通意外事故”;
如果是交通意外事故引发的爆炸,则优先适用交强险条款进行赔付,不足的部分由商业
- 学习Spring必学的Java基础知识(5)—注解
bijian1013
javaspring
文章来源:http://www.iteye.com/topic/1123823,整理在我的博客有两个目的:一个是原文确实很不错,通俗易懂,督促自已将博主的这一系列关于Spring文章都学完;另一个原因是为免原文被博主删除,在此记录,方便以后查找阅读。
有必要对
- 【Struts2一】Struts2 Hello World
bit1129
Hello world
Struts2 Hello World应用的基本步骤
创建Struts2的Hello World应用,包括如下几步:
1.配置web.xml
2.创建Action
3.创建struts.xml,配置Action
4.启动web server,通过浏览器访问
配置web.xml
<?xml version="1.0" encoding="
- 【Avro二】Avro RPC框架
bit1129
rpc
1. Avro RPC简介 1.1. RPC
RPC逻辑上分为二层,一是传输层,负责网络通信;二是协议层,将数据按照一定协议格式打包和解包
从序列化方式来看,Apache Thrift 和Google的Protocol Buffers和Avro应该是属于同一个级别的框架,都能跨语言,性能优秀,数据精简,但是Avro的动态模式(不用生成代码,而且性能很好)这个特点让人非常喜欢,比较适合R
- lua set get cookie
ronin47
lua cookie
lua:
local access_token = ngx.var.cookie_SGAccessToken
if access_token then
ngx.header["Set-Cookie"] = "SGAccessToken="..access_token.."; path=/;Max-Age=3000"
end
- java-打印不大于N的质数
bylijinnan
java
public class PrimeNumber {
/**
* 寻找不大于N的质数
*/
public static void main(String[] args) {
int n=100;
PrimeNumber pn=new PrimeNumber();
pn.printPrimeNumber(n);
System.out.print
- Spring源码学习-PropertyPlaceholderHelper
bylijinnan
javaspring
今天在看Spring 3.0.0.RELEASE的源码,发现PropertyPlaceholderHelper的一个bug
当时觉得奇怪,上网一搜,果然是个bug,不过早就有人发现了,且已经修复:
详见:
http://forum.spring.io/forum/spring-projects/container/88107-propertyplaceholderhelper-bug
- [逻辑与拓扑]布尔逻辑与拓扑结构的结合会产生什么?
comsci
拓扑
如果我们已经在一个工作流的节点中嵌入了可以进行逻辑推理的代码,那么成百上千个这样的节点如果组成一个拓扑网络,而这个网络是可以自动遍历的,非线性的拓扑计算模型和节点内部的布尔逻辑处理的结合,会产生什么样的结果呢?
是否可以形成一种新的模糊语言识别和处理模型呢? 大家有兴趣可以试试,用软件搞这些有个好处,就是花钱比较少,就算不成
- ITEYE 都换百度推广了
cuisuqiang
GoogleAdSense百度推广广告外快
以前ITEYE的广告都是谷歌的Google AdSense,现在都换成百度推广了。
为什么个人博客设置里面还是Google AdSense呢?
都知道Google AdSense不好申请,这在ITEYE上也不是讨论了一两天了,强烈建议ITEYE换掉Google AdSense。至少,用一个好申请的吧。
什么时候能从ITEYE上来点外快,哪怕少点
- 新浪微博技术架构分析
dalan_123
新浪微博架构
新浪微博在短短一年时间内从零发展到五千万用户,我们的基层架构也发展了几个版本。第一版就是是非常快的,我们可以非常快的实现我们的模块。我们看一下技术特点,微博这个产品从架构上来分析,它需要解决的是发表和订阅的问题。我们第一版采用的是推的消息模式,假如说我们一个明星用户他有10万个粉丝,那就是说用户发表一条微博的时候,我们把这个微博消息攒成10万份,这样就是很简单了,第一版的架构实际上就是这两行字。第
- 玩转ARP攻击
dcj3sjt126com
r
我写这片文章只是想让你明白深刻理解某一协议的好处。高手免看。如果有人利用这片文章所做的一切事情,盖不负责。 网上关于ARP的资料已经很多了,就不用我都说了。 用某一位高手的话来说,“我们能做的事情很多,唯一受限制的是我们的创造力和想象力”。 ARP也是如此。 以下讨论的机子有 一个要攻击的机子:10.5.4.178 硬件地址:52:54:4C:98
- PHP编码规范
dcj3sjt126com
编码规范
一、文件格式
1. 对于只含有 php 代码的文件,我们将在文件结尾处忽略掉 "?>" 。这是为了防止多余的空格或者其它字符影响到代码。例如:<?php$foo = 'foo';2. 缩进应该能够反映出代码的逻辑结果,尽量使用四个空格,禁止使用制表符TAB,因为这样能够保证有跨客户端编程器软件的灵活性。例
- linux 脱机管理(nohup)
eksliang
linux nohupnohup
脱机管理 nohup
转载请出自出处:http://eksliang.iteye.com/blog/2166699
nohup可以让你在脱机或者注销系统后,还能够让工作继续进行。他的语法如下
nohup [命令与参数] --在终端机前台工作
nohup [命令与参数] & --在终端机后台工作
但是这个命令需要注意的是,nohup并不支持bash的内置命令,所
- BusinessObjects Enterprise Java SDK
greemranqq
javaBOSAPCrystal Reports
最近项目用到oracle_ADF 从SAP/BO 上调用 水晶报表,资料比较少,我做一个简单的分享,给和我一样的新手 提供更多的便利。
首先,我是尝试用JAVA JSP 去访问的。
官方API:http://devlibrary.businessobjects.com/BusinessObjectsxi/en/en/BOE_SDK/boesdk_ja
- 系统负载剧变下的管控策略
iamzhongyong
高并发
假如目前的系统有100台机器,能够支撑每天1亿的点击量(这个就简单比喻一下),然后系统流量剧变了要,我如何应对,系统有那些策略可以处理,这里总结了一下之前的一些做法。
1、水平扩展
这个最容易理解,加机器,这样的话对于系统刚刚开始的伸缩性设计要求比较高,能够非常灵活的添加机器,来应对流量的变化。
2、系统分组
假如系统服务的业务不同,有优先级高的,有优先级低的,那就让不同的业务调用提前分组
- BitTorrent DHT 协议中文翻译
justjavac
bit
前言
做了一个磁力链接和BT种子的搜索引擎 {Magnet & Torrent},因此把 DHT 协议重新看了一遍。
BEP: 5Title: DHT ProtocolVersion: 3dec52cb3ae103ce22358e3894b31cad47a6f22bLast-Modified: Tue Apr 2 16:51:45 2013 -070
- Ubuntu下Java环境的搭建
macroli
java工作ubuntu
配置命令:
$sudo apt-get install ubuntu-restricted-extras
再运行如下命令:
$sudo apt-get install sun-java6-jdk
待安装完毕后选择默认Java.
$sudo update- alternatives --config java
安装过程提示选择,输入“2”即可,然后按回车键确定。
- js字符串转日期(兼容IE所有版本)
qiaolevip
TODateStringIE
/**
* 字符串转时间(yyyy-MM-dd HH:mm:ss)
* result (分钟)
*/
stringToDate : function(fDate){
var fullDate = fDate.split(" ")[0].split("-");
var fullTime = fDate.split("
- 【数据挖掘学习】关联规则算法Apriori的学习与SQL简单实现购物篮分析
superlxw1234
sql数据挖掘关联规则
关联规则挖掘用于寻找给定数据集中项之间的有趣的关联或相关关系。
关联规则揭示了数据项间的未知的依赖关系,根据所挖掘的关联关系,可以从一个数据对象的信息来推断另一个数据对象的信息。
例如购物篮分析。牛奶 ⇒ 面包 [支持度:3%,置信度:40%] 支持度3%:意味3%顾客同时购买牛奶和面包。 置信度40%:意味购买牛奶的顾客40%也购买面包。 规则的支持度和置信度是两个规则兴
- Spring 5.0 的系统需求,期待你的反馈
wiselyman
spring
Spring 5.0将在2016年发布。Spring5.0将支持JDK 9。
Spring 5.0的特性计划还在工作中,请保持关注,所以作者希望从使用者得到关于Spring 5.0系统需求方面的反馈。