CNN
简介
- 视觉皮质有一块很小的局部感受野(local receptive feld)。不同的感受野之间可能会发生重叠,所有的感受野组成了可视区域
- 对视觉皮质的研究最终演化为CNN,CNN除了之前的全连接层以及激活函数等概念,还引入了卷积层和池化层等概念
setup code
import warnings
warnings.filterwarnings("ignore")
%matplotlib inline
import matplotlib.pyplot as plt
import numpy as np
import tensorflow as tf
import os
gpu_options = tf.GPUOptions(allow_growth=True)
def reset_graph(seed=42):
tf.reset_default_graph()
tf.set_random_seed(seed)
np.random.seed(seed)
return
with tf.Session( ) as sess:
print( sess.run( tf.constant(1) ) )
1
卷积层
- 之前的dnn中,每一个网络层的所有节点都与之前的所有节点相连;而在CNN中,第一个卷积层中的神经元并非与输入图像中的所有节点都连接,它们只与感受野内的像素有关。同时第二层卷积层也只与第一层卷积层的部分节点连接。
- 这种结构使得网络可以在第一层隐含层内提取低阶特征,然后在下一层隐含层中再集成为高阶特征,这与真实情况很符合,其效果也十分显著。
- 在之前训练多层神经网络中,每一层的网络中的每一个样本都是1D的向量,在CNN中,每一层中的每个样本可以表示为2D的矩阵(图像)。
- 对于一个特定的网络层,它在 (i,j) ( i , j ) 处的神经元与前一层中 [i,i+fh−1,j,j+fw−1] [ i , i + f h − 1 , j , j + f w − 1 ] (行的下限与上限、列的下限与上限)区域的神经元相连接。因此如果不做额外的处理,两个网络层的尺寸往往不同;一般会再前一层的边缘补充0元素,这就是
zero padding。
- 如果调整感受野之间的间距(上一步中说的间距为1),可以进一步减小下一网络层的大小。 (i,j) ( i , j ) 位置处的神经元与前一层中的 [i×sh,i×sh+fh−1,j×sw,j×sw+fw−1] [ i × s h , i × s h + f h − 1 , j × s w , j × s w + f w − 1 ] 。其中 sh s h 与 sw s w 是竖直与水平方向的步长。
filters
- 一个神经元节点的权重的大小就是其感受野的大小,这个权重矩阵就是卷积核(convolution kernels)
- 不同的神经元之间的卷积核如果相同,则可以实现权重共享,大大减少CNN的参数量
feature map
- 之前提到的是只对一幅图像提取一种特征,但是如果有很多个特征,则可以建立卷积层的feature map,每个feature map实现权值共享,但是不同的卷积层之间的参数可能不同。即,一个卷积层同时用多个卷积核对它的输入做处理,以便于检测输入的多种特征。
- 输入图像也可以不仅仅是2D图像,也可以包含3维信息(RGB)
- 一个CNN上(i,j,k)处的值为
zi,j,k=bk+∑i′=i×shi×sh+fh−1∑j′=j×swj×sw+fw−1∑k′=1fn′xx′,j′,k′wx′,j′,k′,k z i , j , k = b k + ∑ i ′ = i × s h i × s h + f h − 1 ∑ j ′ = j × s w j × s w + f w − 1 ∑ k ′ = 1 f n ′ x x ′ , j ′ , k ′ w x ′ , j ′ , k ′ , k
其中 xi′,j′,k′ x i ′ , j ′ , k ′ 是前一层神经元在第 k′ k ′ 层feature map上的输出, bk b k 是偏置项,w是权值矩阵,因此每一层的权重参数维度为 fh×fw×fk′×fk f h × f w × f k ′ × f k
TF中卷积层的使用
- TF中输入图像可以被表示为3D的tensor, [height,width,channels] [ h e i g h t , w i d t h , c h a n n e l s ] ,一个batch是4D的tensor, [batch_size,height,width,channels] [ b a t c h _ s i z e , h e i g h t , w i d t h , c h a n n e l s ] ,卷积核的权重是一个4D的tensor, [fh,fw,fn,fn′] [ f h , f w , f n , f n ′ ] ( fn f n , fn′ f n ′ 分别是当前和上一层网络的feature map个数),偏置为1D的tensor, [fn] [ f n ] ,即当前神经网络中,每一个feature map的偏置都不一样。
- strides参数是一个有1X4的向量,其中strides[0]=strides[3]=1,另外2个数分别是在行和列上的步长
- padding为”SAME”时,会在边缘补0,为VALID时,得到的图像大小会比之前的小
from sklearn.datasets import load_sample_images
dataset = np.array( load_sample_images().images, dtype=np.float32 )
batch_size, height, width, channels = dataset.shape
print( dataset.shape )
filters = np.zeros( shape=(7,7,channels,3), dtype=np.float32 )
filters[:,3,:,0] = 1
filters[3,:,:,1] = 1
X = tf.placeholder( tf.float32, shape=(None, height, width, channels) )
convolution = tf.nn.conv2d( X, filters, strides=[1,2,2,1], padding="SAME" )
with tf.Session() as sess:
output = sess.run( convolution, feed_dict={X:dataset} )
print( output.shape )
plt.figure( figsize=(10,5) )
plt.subplot(121)
plt.imshow( output[1,:,:,0] )
plt.subplot(122)
plt.imshow( output[1,:,:,1] )
plt.show()
(2, 427, 640, 3)
(2, 214, 320, 3)
- CNN中有一些超参数需要调节,比如卷积核个数、大小、步长、padding方式等,可以通过交叉验证的方法找到适合的超参数。
- CNN的参数量虽然相对全连接层已经减少了很多,但是还是很大,如果输入是 H×W×3 H × W × 3 的图像,第一个卷积层的卷积核大小为 Nf×Nf N f × N f , Nfm N f m 个feature map,padding方式为”SAME”,则这两层之间的参数个数为 Nfm×(Nf×Nf×3+1) N f m × ( N f × N f × 3 + 1 ) ,其中1表示每个feature map上的偏置。因此在设计CNN的时候需要考虑其内存占用情况
- 在训练的过程中,为了之后进行反向计算,所有在前向计算时的参数都需要保存,因此一个CNN在训练的过程中需要的RAM与所有层的参数量之和成正比
池化层(pooling layer)
- 池化层主要是对输入图像进行降采样(subsample),为了降低CNN的计算负载、内存使用以及参数量等,这也能够降低CNN过拟合的风险,同时也使得网络具有部分的位移不变性
- 池化层的感受野是一个正方形的区域,它是将上一层的感受野转化为一个值(最大值或者平均值等)
- 池化层是对每个输入层的通道进行单独处理。
- TF中,可以设置池化的size,strides,padding等参数
- TF中,池化的kernel size(ksize)的第一个数必须是1,因为目前TF无法对多个样本做池化,同时无法对三维空间同时做池化,因此第2~4个数中必须有一个为1
- 目前池化层最主要的作用就是减小上一个网络层的尺寸,很少涉及不同feature map之间的交互操作
X = tf.placeholder( tf.float32, shape=(None, height, width, channels) )
max_pool = tf.nn.max_pool( X, ksize=[1,2,2,1], strides=[1,2,2,1], padding="VALID" )
with tf.Session() as sess:
output = sess.run( max_pool, feed_dict={X:dataset} )
print( dataset.shape )
print( output.shape )
(2, 427, 640, 3)
(2, 213, 320, 3)
- 在CNN使用的过程中,可以避免使用一些过大的卷积核,将其拆分成由若干个小的卷积核组成,可以大大减小参数量
一些典型的网络结构
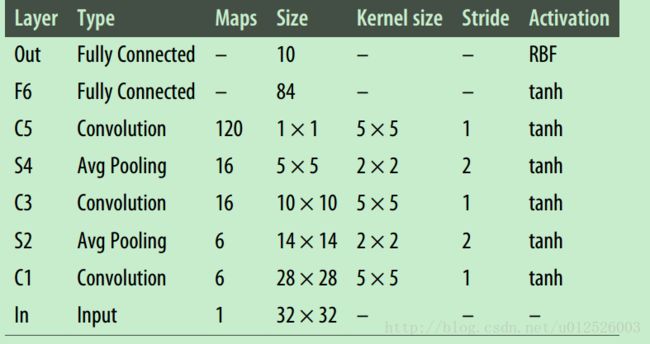
LeNet-5
- 主要包含以下几层
- input -> Convolution -> Avg Pooling -> Convolution -> Avg Pooling -> Convolution -> FC -> FC(output)
AlexNet
- AlexNet是第一个将卷积层之间连接的神经网络(之前LeNet中是CNN之间加入池化层)。结构如下
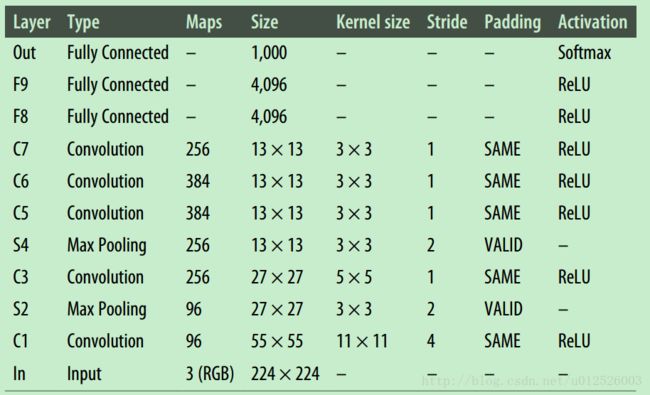
- AlexNet中使用了之前博文中提到的两种正则化方法防止过拟合:dropout与数据增强技术(给图像施加不同的偏移量、水平翻转以及改变图像亮度)
- AlexNet提出了local response normalization(LRN),对C1和C3的RELU输出结果进行处理,提升了模型的泛化能力。计算方法如下
bi=ai(k+α∑j=max(0,i−r2)min(i+r2,fn−1)a2j)−β b i = a i ( k + α ∑ j = max ( 0 , i − r 2 ) min ( i + r 2 , f n − 1 ) a j 2 ) − β
其中 bi b i 是LRN处理后的输出, ai a i 是RELU激活函数的输出。 k,α,β,r k , α , β , r 都是超参数。
- 注:这个正则化方法可以用其他的正则化方法替代。
GoogleNet
- GoogleNet的网络层比之前的深很多,采用了子网络的结构,是inception module
- inception module中包含很多个很小的卷积核,它们串联之后,作用与大的卷积核相似,但是大大减少了模型的参数量。
- GoogleNet包含了9个inception module,具体的网络结构可以参考:http://blog.csdn.net/marsjhao/article/details/73088850
ResNet
- 之前对DNN的研究中,理论上采用无限深的网络结构可以逼近任意函数,但是由于很深的NN在训练时会遇到梯度弥散的问题,因此效果一般并不好。
- ResNet包含152层的网络结构,采用了shortcut connection的概念,即加入了恒等映射层,输入可以通过网络层处理到达下一层,也可以直接到达下一层,因此网络随着深度的增加,也不会发生退化现象,这解决了深层网络训练过程中的梯度弥散问题。
- 参考链接:https://www.jianshu.com/p/46d76bd56766,http://blog.csdn.net/circleyuanquan/article/details/60875016
TF中一些卷积的操作
- conv1d是1维向量的卷积操作,在NLP等中常被用到。
- conv3d是对3D矩阵做卷积。
- astrous_conv2d:相当于扩大卷积核的大小(中间扩大的部分用0补齐),这可以在不增加额外参数的条件下增大神经元节点的感受野。
- conv2d_transpose:相当于创建deconvolutional layer,这是对图像做升采样(可以认为在卷积过程中stride是小于1的),在segmentation等任务中常常用到
- depthwise_conv2d:对每一个输入的map做处理,如果卷积核设置的为 fn f n 个map,输入是 fn′ f n ′ 个map,则这个卷积操作会输出 fn×fn′ f n × f n ′ 个feature map。
- separable_conv2d:先像depthwise_conv2d那样操作,然后再使用1X1的卷积核做处理,这可以使得不同feature map之间的信息进行交互。
import tensorflow as tf
height = 28
width = 28
channels = 1
n_inputs = height * width
conv1_fmaps = 32
conv1_ksize = 3
conv1_stride = 1
conv1_pad = "SAME"
conv2_fmaps = 64
conv2_ksize = 3
conv2_stride = 1
conv2_pad = "SAME"
conv2_dropout_rate = 0.25
pool3_fmaps = conv2_fmaps
n_fc1 = 128
fc1_dropout_rate = 0.5
n_outputs = 10
reset_graph()
with tf.name_scope("inputs"):
X = tf.placeholder(tf.float32, shape=[None, n_inputs], name="X")
X_reshaped = tf.reshape(X, shape=[-1, height, width, channels])
y = tf.placeholder(tf.int32, shape=[None], name="y")
training = tf.placeholder_with_default(False, shape=[], name='training')
conv1 = tf.layers.conv2d(X_reshaped, filters=conv1_fmaps, kernel_size=conv1_ksize,
strides=conv1_stride, padding=conv1_pad,
activation=tf.nn.relu, name="conv1")
conv2 = tf.layers.conv2d(conv1, filters=conv2_fmaps, kernel_size=conv2_ksize,
strides=conv2_stride, padding=conv2_pad,
activation=tf.nn.relu, name="conv2")
with tf.name_scope("pool3"):
pool3 = tf.nn.max_pool(conv2, ksize=[1, 2, 2, 1], strides=[1, 2, 2, 1], padding="VALID")
pool3_flat = tf.reshape(pool3, shape=[-1, pool3_fmaps * 14 * 14])
pool3_flat_drop = tf.layers.dropout(pool3_flat, conv2_dropout_rate, training=training)
with tf.name_scope("fc1"):
fc1 = tf.layers.dense(pool3_flat_drop, n_fc1, activation=tf.nn.relu, name="fc1")
fc1_drop = tf.layers.dropout(fc1, fc1_dropout_rate, training=training)
with tf.name_scope("output"):
logits = tf.layers.dense(fc1, n_outputs, name="output")
Y_proba = tf.nn.softmax(logits, name="Y_proba")
with tf.name_scope("train"):
xentropy = tf.nn.sparse_softmax_cross_entropy_with_logits(logits=logits, labels=y)
loss = tf.reduce_mean(xentropy)
optimizer = tf.train.AdamOptimizer()
training_op = optimizer.minimize(loss)
with tf.name_scope("eval"):
correct = tf.nn.in_top_k(logits, y, 1)
accuracy = tf.reduce_mean(tf.cast(correct, tf.float32))
with tf.name_scope("init_and_save"):
init = tf.global_variables_initializer()
saver = tf.train.Saver()
from tensorflow.examples.tutorials.mnist import input_data
mnist = input_data.read_data_sets("./dataset/mnist/")
def get_model_params():
gvars = tf.get_collection(tf.GraphKeys.GLOBAL_VARIABLES)
return {gvar.op.name: value for gvar, value in zip(gvars, tf.get_default_session().run(gvars))}
def restore_model_params(model_params):
gvar_names = list(model_params.keys())
assign_ops = {gvar_name: tf.get_default_graph().get_operation_by_name(gvar_name + "/Assign")
for gvar_name in gvar_names}
init_values = {gvar_name: assign_op.inputs[1] for gvar_name, assign_op in assign_ops.items()}
feed_dict = {init_values[gvar_name]: model_params[gvar_name] for gvar_name in gvar_names}
tf.get_default_session().run(assign_ops, feed_dict=feed_dict)
n_epochs = 10
batch_size = 50
with tf.Session() as sess:
init.run()
for epoch in range(n_epochs):
for iteration in range(mnist.train.num_examples // batch_size):
X_batch, y_batch = mnist.train.next_batch(batch_size)
sess.run(training_op, feed_dict={X: X_batch, y: y_batch, training: True})
acc_train = accuracy.eval(feed_dict={X: X_batch, y: y_batch})
acc_val = accuracy.eval(feed_dict={X: mnist.validation.images,
y: mnist.validation.labels})
print("Epoch {}, train accuracy: {:.4f}%, valid. accuracy: {:.4f}%, valid. best loss: {:.6f}".format(
epoch, acc_train * 100, acc_val * 100, best_loss_val))
acc_test = accuracy.eval(feed_dict={X: mnist.test.images,
y: mnist.test.labels})
print("Final accuracy on test set:", acc_test)
Extracting ./dataset/mnist/train-images-idx3-ubyte.gz
Extracting ./dataset/mnist/train-labels-idx1-ubyte.gz
Extracting ./dataset/mnist/t10k-images-idx3-ubyte.gz
Extracting ./dataset/mnist/t10k-labels-idx1-ubyte.gz
mnist.validation.labels.shape
(5000,)