安装使用RGBDSLAM_Freiburg
作者:微笑的阿当
作者原创,如需转载,请注明出处: http://blog.csdn.net/adangsmile/article/details/21475631一、安装ROS_fuerte版本
1. 配置Ubuntu软件源
配置软件源,允许restricted,universe和multiverse。
2. 创建sources.list
$ sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntuprecise main" > /etc/apt/sources.list.d/ros-latest.list'
3. 创建keys
$wget http://packages.ros.org/ros.key -O - | sudo apt-key add –
4. 安装
$sudo apt-get update
$sudo apt-get install ros-fuerte-desktop-full
5. 创建环境
$source /opt/ros/fuerte/setup.bash
6. 安装工具(提前安装,下面会用到)
$sudo apt-get install python-rosinstall python-rosdep
二、创建ROS工作空间
1. 创建一个新工作空间
使用如下命令创建一个新工作空间~/fuerte_workspace。
$sudo apt-get install python-rosinstall
$rosws init ~/fuerte_workspace /opt/ros/fuerte
2. 创建一个sandbox目录
使用以下命令来创建一个新目录sandbox,并使用rosws命令把它加入到隐藏文件.rosinstall中。
$mkdir ~/fuerte_workspace/sandbox
$rosws set ~/fuerte_workspace/sandbox
每当工作空间中的条目发生变化,必须重新source ~/fuerte_workspace/setup.bash,以确保使用的是更新后的ROS_PACKAGE_PATH。
$source ~/fuerte_workspace/setup.bash
3. 确认
为了查看包目录是否正确设置,输出 ROS_PACKAGE_PATH变量值。
$ echo $ROS_PACKAGE_PATH
如果看到如下内容,则证明包目录设置正确。
/home/your_user_name/fuerte_workspace/sandbox:/opt/ros/fuerte/share:/opt/ros/fuerte/stacks
三、下载和安装
1. 下载
使用如下命令将rgbdslam_freiburg下载到工作空间。
$svn cohttp://alufr-ros-pkg.googlecode.com/svn/trunk/rgbdslam_freiburg
使用如下命令将rgbdslam_freiburg拷贝到sandbox目录。
$cp -ri rgbdslam_freiburg/home/your_user_name/fuerte_workspace/sandbox/
2. 安装依赖
首先安装如下依赖文件。
$sudo apt-get install libglew1.6-dev libdevil-dev libsuitesparse-dev
$sudo apt-get install ros-fuerte-octomap-mapping
$sudo apt-get install ros-fuerte-openni-launch
3. 安装rgbdslam_freiburg
执行如下命令来解决安装过程中的所有系统依赖问题(如果发生错误,则将发生错误的命令重新执行,执行若干次就正确了,不知道为什么会这样)。
$sudo apt-get install python-rosdep
$cd /home/your_user_name/fuerte_workspace/sandbox/
$sudo rosdep init
$rosdep update
$rosdep install rgbdslam_freiburg(此处一定要使用Tab补全,这样路径才能被正确识别)
执行以下命令进行编译,这步会花费较长时间。
$rosmakergbdslam_freiburg
四、使用
执行以下命令启动RGBDSLAM。
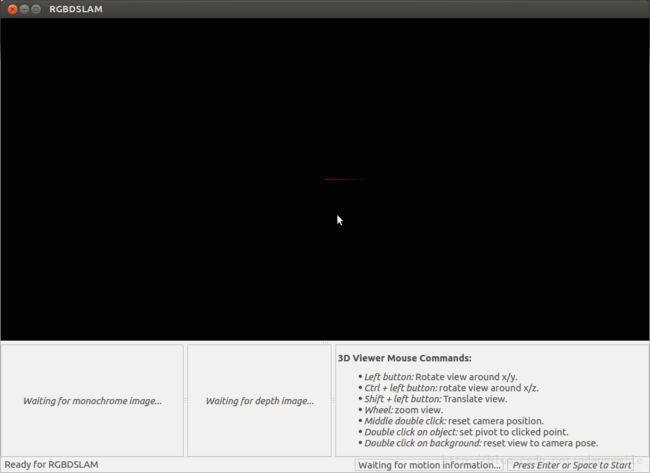
$roslaunch rgbdslam kinect+rgbdslam.launch
启动后界面如下图所示。
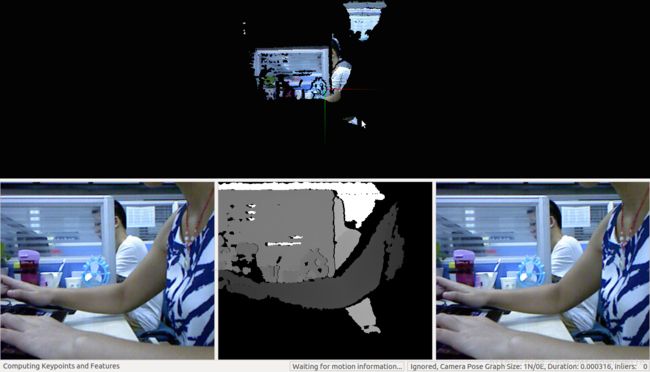
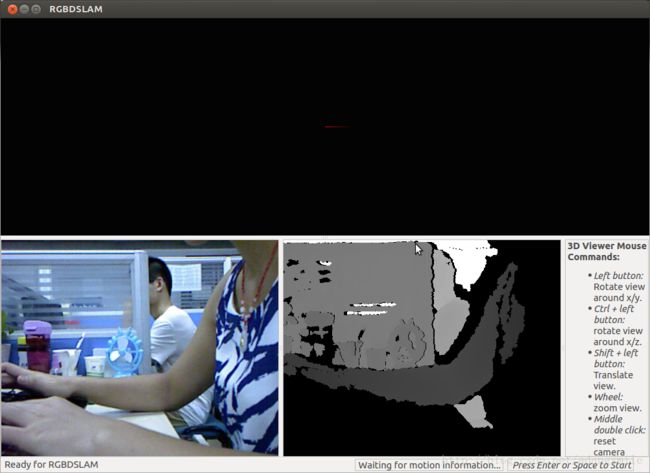
系统完全启动后界面如下图所示。
敲“空格键”或“回车键”开始进行数据采集,如下图所示。