如何使用Kinect显示彩色图像和深度图像。
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Windows;
using System.Windows.Controls;
using System.Windows.Data;
using System.Windows.Documents;
using System.Windows.Input;
using System.Windows.Media;
using System.Windows.Media.Imaging;
using System.Windows.Navigation;
using System.Windows.Shapes;
using Microsoft.Kinect;
namespace WpfApplication2
{
///
/// MainWindow.xaml 的交互逻辑
///
public partial class MainWindow : Window
{
public MainWindow()//vs2010自动生成的。
{
InitializeComponent();
}
private KinectSensor _kinect;//一个全局变量,自然是用来调用Kinect用的,
private void startKinect()
{
if (KinectSensor.KinectSensors.Count > 0)//如果有一个Kinect是可以使用的。
{
_kinect = KinectSensor.KinectSensors[0];//打开第一个Kinect
MessageBox.Show("kinect 目前的状态为:" + _kinect.Status);//这里调用一个messagebox来显示现在的状态。
_kinect.ColorStream.Enable(ColorImageFormat.RgbResolution640x480Fps30);
_kinect.DepthStream.Enable(DepthImageFormat.Resolution640x480Fps30);
_kinect.SkeletonStream.Enable();//使能skeleton
_kinect.AllFramesReady +=
new EventHandler(_kinect_AllFramesReady); //大概意思就是添加一个事件处理程序吧,类似于单片机中的//中断。
_kinect.Start();//设置完成之后启动Kinect
}//if
else
{
MessageBox.Show("没有任何Kinect设备");
}
}//start kinect
void _kinect_AllFramesReady(object sender, AllFramesReadyEventArgs e)//打开并显示彩色图像的具体程序。
{
using (ColorImageFrame colorFrame = e.OpenColorImageFrame())
{
if (colorFrame == null)
{
return;
}//if null
byte[] pixels = new byte[colorFrame.PixelDataLength];
colorFrame.CopyPixelDataTo(pixels);
int stride = colorFrame.Width * 4;
imageCamera.Source =//这个imageCamera变量时在mainFrame中定义的一个Image控件。
BitmapSource.Create(colorFrame.Width, colorFrame.Height,
96, 96, PixelFormats.Bgr32, null, pixels, stride);
}
//throw new NotImplementedException();
}
private void Window_Loaded(object sender, RoutedEventArgs e)//当第一次窗体加载时,调用StartKinect。
{
startKinect();
}
}
} 成功显示图:

行了显示完彩色图像,开始显示深度图像:
先上效果图:
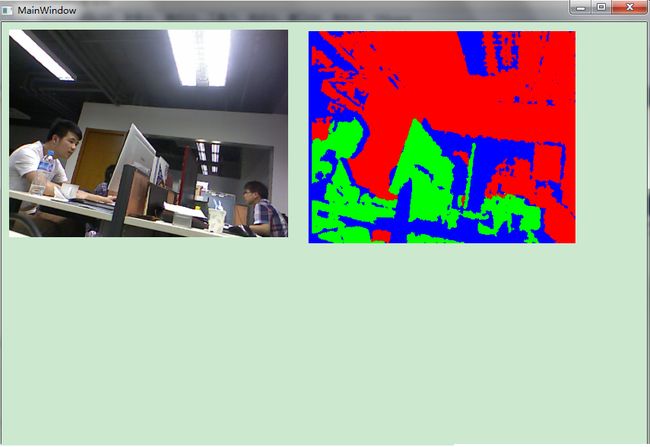
其实代码页很简单,就是在原来的代码的基础上加上一个:private byte[] convertDepthFrameToColorFrame(DepthImageFrame depthFrame);函数。这个函数的大概意思就是把8位的深度图转换成32位的彩色图。再在
void _kinect_AllFramesReady(object sender, AllFramesReadyEventArgs e)函数中添加下图的代码就ok了。
改后的代码如下:
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
using System.Windows;
using System.Windows.Controls;
using System.Windows.Data;
using System.Windows.Documents;
using System.Windows.Input;
using System.Windows.Media;
using System.Windows.Media.Imaging;
using System.Windows.Navigation;
using System.Windows.Shapes;
using Microsoft.Kinect;
namespace WpfApplication2
{
///
/// MainWindow.xaml 的交互逻辑
///
public partial class MainWindow : Window
{
public MainWindow()
{
InitializeComponent();
}
private KinectSensor _kinect;
const float MaxDepthDistance = 4095;
const float MinDepthDistance = 850;
const float MaxDepthDistanceOffSet = MaxDepthDistance - MinDepthDistance;
private const int RedIndex = 2;
private const int GreenIndex = 1;
private const int BlueIndex = 0;
private void startKinect()
{
if (KinectSensor.KinectSensors.Count > 0)
{
_kinect = KinectSensor.KinectSensors[0];
MessageBox.Show("kinect 目前的状态为:" + _kinect.Status);
_kinect.ColorStream.Enable(ColorImageFormat.RgbResolution640x480Fps30);
_kinect.DepthStream.Enable(DepthImageFormat.Resolution640x480Fps30);
_kinect.SkeletonStream.Enable();
_kinect.AllFramesReady +=
new EventHandler(_kinect_AllFramesReady);
_kinect.Start();
}//if
else
{
MessageBox.Show("没有任何Kinect设备");
}
}//start kinect
void _kinect_AllFramesReady(object sender, AllFramesReadyEventArgs e)
{
using (ColorImageFrame colorFrame = e.OpenColorImageFrame())
{
if (colorFrame == null)
{
return;
}//if null
byte[] pixels = new byte[colorFrame.PixelDataLength];
colorFrame.CopyPixelDataTo(pixels);
int stride = colorFrame.Width * 4;
imageCamera.Source =
BitmapSource.Create(colorFrame.Width, colorFrame.Height,
96, 96, PixelFormats.Bgr32, null, pixels, stride);
}
using (DepthImageFrame depthFrame = e.OpenDepthImageFrame())
{
if (depthFrame == null)
{
return;
}
byte[] pixels = convertDepthFrameToColorFrame(depthFrame);
int stride = depthFrame.Width * 4;
imageDepth.Source = BitmapSource.Create(depthFrame.Width, depthFrame.Height,
96, 96, PixelFormats.Bgr32, null, pixels, stride);
}//depth frame ;
//throw new NotImplementedException();
}
private void Window_Loaded(object sender, RoutedEventArgs e)
{
startKinect();
}
private byte[] convertDepthFrameToColorFrame(DepthImageFrame depthFrame)
{
short[] rawDepthData = new short[depthFrame.PixelDataLength];
depthFrame.CopyPixelDataTo(rawDepthData);
byte[] pixels = new byte[depthFrame.Height * depthFrame.Width*4 ];
for (int depthIndex = 0, colorIndex = 0;
depthIndex < rawDepthData.Length && colorIndex < pixels.Length;
depthIndex++, colorIndex+=4)
{
int player = rawDepthData[depthIndex] & DepthImageFrame.PlayerIndexBitmask;
int depth = rawDepthData[depthIndex] >> DepthImageFrame.PlayerIndexBitmaskWidth;
if (depth <= 900)
{
pixels[colorIndex + BlueIndex] = 255;
pixels[colorIndex + GreenIndex] = 0;
pixels[colorIndex + RedIndex] = 0;
}//距离Kinect很近
else if (depth > 900 && depth < 2000)
{
pixels[colorIndex + BlueIndex] = 0;
pixels[colorIndex + GreenIndex] = 255;
pixels[colorIndex + RedIndex] = 0;
}//900,20000
else if (depth > 2000)
{
pixels[colorIndex + BlueIndex] = 0;
pixels[colorIndex + GreenIndex] = 0;
pixels[colorIndex + RedIndex] = 255;
}//2000
if (player > 0)
{
pixels[colorIndex + BlueIndex] = Colors.LightGreen.B;
pixels[colorIndex + GreenIndex] = Colors.LightGreen.G;
pixels[colorIndex + RedIndex] = Colors.LightGreen.R;
}
}//for
return pixels;
}//convert
}
}
ok至此深度图可以显示了,。