ANO匿名飞控分析(1)— 遥控器解码
- 准备电赛,简单写一下匿名飞控的分析
- 基于TM4C主控的匿名拓空者飞控,介绍见匿名科创–匿名拓空者PRO—TI版全开源飞控使用入门—TM4C123
文章目录
- 一、简介
- 二、PWM信号模式
- 1、介绍
- 2、硬件连接
- 三、PPM信号模式
- 1、PPM介绍
- 2、硬件连接
- 3、代码分析
- (1)初始化部分
- (2)解码
- 四、SBUS信号模式
- 1、SBUS介绍
- 2、硬件连接
- 3、代码分析
- (1)初始化部分
- (2)解码
- *小结
- 五、通道看门狗
- 1、遥控数据读取和处理任务
- 2、通道看门狗
一、简介
- 航模接收机的输出信号,乍看起来是PWM波,但严谨的看法是高电平脉冲的宽度。不同厂家接收机设计的信号周期不一样相同,甚至同一个接收机使用时信号周期也不一定相同。所谓接收机类型中的
PWM型、SBUS型、PPM型,本质上只是对脉冲宽度按不同的方式编码 - 通常脉宽变化范围是1000us~2000us,一般航模遥控器中:
(1)方向、油门之类的双向控制,中间值是1500us,两个方向的极值分别是1000us和2000us;
(2)模式切换按钮,分别在1000us和2000us之间切换。
(3)无刷电调没有方向,在1000us时油门为0,2000us时油门最大。 - 官方介绍中,匿名飞控支持
PPM,SUBS和PWM三种遥控信号输入格式,默认为PPM,但实际上,TM4C主控版本的飞控在程序上只支持PPM,SUBS两种模式(我2019/6/27拿到的版本是这样的),stm32版本的飞控支持PWM。 - 在匿名上位机“飞控设置”功能页面,然后打开“参数设置”,可以修改接收机模式

这里实际上是用USB串口和TM4C通讯,相关设置会存贮在板载EEPROM中,掉电后也可以保留 - 官方介绍参考这里:匿名拓空者Pro开源飞控使用介绍-5-接收机连接
二、PWM信号模式
1、介绍
- PWM型接收机,会把接收到的每一个通道的脉宽值,都转换为PWM波的形式,用一个针脚单独输出,基本上所有接收机都支持这种输出形式,是使用范围最广的。
- 解码时,需要每个通道单独用一个IO口进行输入捕获,记录其脉宽。因此这种形式接收机接线复杂,资源占用多
2、硬件连接
- 匿名飞控的板子上其实做了PWM接收机的信号接口,如下,这个框为无用的接口就是PWM接收机信号输入,这是一个8pin插头,对应8个通道

- 查看一下原理图

这一看就是32版本的原理图啊,TM4C一个定时器只能做两路输入捕获,而且命名也不是这样的。。。推测TM4C版飞控的这个接口应该没有内部连接,但原理图还是给的32版本的
三、PPM信号模式
1、PPM介绍
-
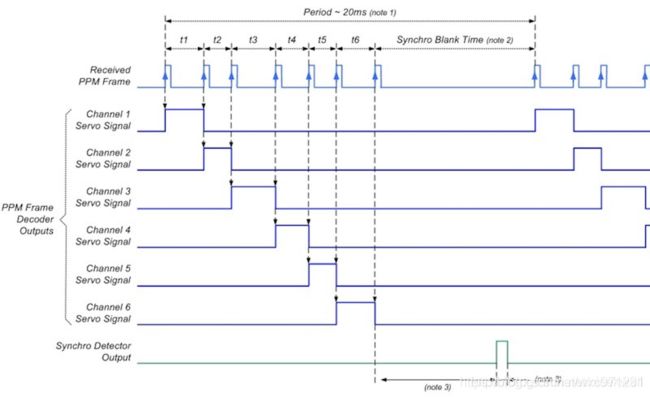
PPM信号是把多路PWM波压缩到一路中的编码方式,通常20ms为一个周期,用一系列高电平脉冲之间的间隔时间表示每一路PWM波的脉宽,见下图
-
注意:
- 各个通道的高电平信号是一个挨着一个的,而不是每个通道固定分配2ms的时间
- 两个相邻通道间不一定是紧挨着的(表示前一个通道结束的脉冲,和表示下一个通道开始的脉冲,不一定是完全重合的),其间间隔时间也不一定
- 单路信号最长是2000us,周期20ms,所以理论上可以容纳10路。而由于需要进行同步,实际上遥控器最多只能容纳9路信号,每个周期的最后有一段较长时间的低电平(至少2ms),单片机通过它判断一个PPM周期结束
-
更多内容,参考PPM信号介绍
2、硬件连接


- 可以看到直接连接到PC7,一个IO口做输入捕获即可
3、代码分析
(1)初始化部分
在程序最开始,调用Drv_BspInit();对整机的传感器和外设等进行初始化,其中调用Remote_Control_Init函数进行遥控接收配置,程序如下
//初始化遥控接受
static u8 RC_IN_MODE;
void Remote_Control_Init()
{
RC_IN_MODE = Ano_Parame.set.pwmInMode;
if(RC_IN_MODE == SBUS)
{
Drv_SbusInit(); //SBUS->UART3
}
else
{
Drv_PpmInit(); //PPM->timer1B输入捕获
// PWM_IN_Init(RC_IN_MODE);
}
}
Ano_Parame.set结构体中存储了所有将被设置的参数,包括pid参数、起飞降落速度等,其中pwmInMode为接收机模式Ano_Parame是一个共用体,set和一个2048字节的uint8_t数组byte公用空间,上电后程序先从EEPROM中读取2048字节数据到共用体Ano_Parame的byte中,从而对共用内存空间的set结构体赋值。可见遥控模式设定pwmInMode是保存在ROM中的,设置一次后就一直保持Ano_Parame.set.pwmInMode有三种取值,如下。根据Remote_Control_Init函数中的if-else语句,可见TM4C版飞控中PWM模式其实也是PPM,二者的处理是相同的
enum pwminmode_e
{
PWM = 0,
PPM,
SBUS,
};
- 查看PPM接收的外设初始化函数
Drv_PpmInit();
/*******************************************************************************************************************
*函 数 名: Drv_PpmInit
*功能说明: 初始化ppm解码,配置PC7为输入捕获引脚,定时器5B为捕获上升沿,边沿加计时模式,计数范围0-0xffffff,频率80M
*形 参: 无
*返 回 值: 无
*******************************************************************************************************************/
void Drv_PpmInit(void)
{
/*启动GPIOC*/
ROM_SysCtlPeripheralEnable(PPM_SYSCTL);
/*启动wide timer 1 (32/64 bit)*/
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_WTIMER1);
/*GPIOC配置为定时器捕获模式*/
ROM_GPIOPinTypeTimer(PPM_PORTS, PPM_PIN);
ROM_GPIOPinConfigure(PPM_FUNCTION);
/*配置定时器5B为捕获上升沿,边沿加计时模式*/
ROM_TimerConfigure( WTIMER1_BASE ,TIMER_CFG_SPLIT_PAIR | TIMER_CFG_B_CAP_TIME_UP );
ROM_TimerControlEvent(WTIMER1_BASE,TIMER_B,TIMER_EVENT_POS_EDGE);
/*计时范围0-0xffffff,计数频率同系统频率80M*/
ROM_TimerLoadSet( WTIMER1_BASE , TIMER_B , 0xffff );
//注意这个函数,这个8位的预分频寄存器,只有单次或周期的定时是真正的预分频寄存器,这里做输入捕获,其实是把这8位当成WTIMER1B的高8位了,从而扩展了捕获时的计数范围到24位
ROM_TimerPrescaleSet( WTIMER1_BASE , TIMER_B , 0xff );
/*开启定时器中断*/
TimerIntRegister(WTIMER1_BASE, TIMER_B , PPM_Decode);
ROM_IntPrioritySet( INT_WTIMER1B , USER_INT6);
ROM_TimerIntEnable( WTIMER1_BASE , TIMER_CAPB_EVENT);
ROM_TimerEnable( WTIMER1_BASE, TIMER_B );
ROM_IntEnable( INT_WTIMER1B );
}
- 可以看到,这里把PC7配置为输入捕获,捕获模式为上升沿加计时,计时频率为80MHz,计数范围0-0xffffff,具体分析参考TM4C123G学习记录(7)–输入捕获
- 注意中断的配置,当发生捕获事件(检测到上升沿)时,执行中断服务函数
PPM_Decode
(2)解码
/*******************************************************************************************************
*函 数 名: PPM_Decode
*功能说明: PPM解码,把每个PWM脉宽分离出来
*形 参: 无
*返 回 值: 无
*关于 PPM:PPM信号把多路PWM信号调制到一路通道上,标准刷新率是50Hz(周期20ms),每路脉宽变化范围是1000us~2000us。
1. 方向、油门之类的双向控制,中间值是1500us,两个方向的极值分别是1000us和2000us;
2. 模式切换按钮,分别在1000us和2000us之间切换。
3. 无刷电调没有方向,在1000us时油门为0,2000us时油门最大
******************************************************************************************************/
static void PPM_Decode(void)
{
static uint32_t PeriodVal1,PeriodVal2 = 0;
static uint32_t PulseHigh;
/* 清除中断标志 */
ROM_TimerIntClear( WTIMER1_BASE , TIMER_CAPB_EVENT );
/* 获取捕获值 */
PeriodVal1 = ROM_TimerValueGet( WTIMER1_BASE , TIMER_B ); //PeriodVal1是高电平到来时的计数值
/* 计算高电平持续时间,1对应1us,注意过零点处理 */
if( PeriodVal1 > PeriodVal2 )
PulseHigh = (PeriodVal1 - PeriodVal2) /80;
else
PulseHigh = (PeriodVal1 - PeriodVal2 + 0xffffff)/80;
PeriodVal2 = PeriodVal1;
PPM_Cal(PulseHigh);
}
/**********************************************************************************************************
*函 数 名: PPM_Cal
*功能说明: PPM通道数据计算
*形 参: 无
*返 回 值: 无
**********************************************************************************************************/
static void PPM_Cal(uint32_t PulseHigh)
{
static uint8_t Chan = 0; //通道标记
/* 脉宽高于一定值(5000us)说明一帧数据已经结束 */
if(PulseHigh > 5000)
Chan = 0;
/* 脉冲高度正常 */
else
{
if (PulseHigh > PULSE_MIN && PulseHigh < PULSE_MAX)
{
if(Chan < 16)
{
/* 通道读取正常,给通道Chan喂狗 */
ch_watch_dog_feed(Chan);
RC_PPM.Captures[Chan++] = PulseHigh;
}
}
}
}
-
PPM_Decode()是一个中断服务函数,当PPM输入引脚捕获到高电平脉冲上升沿时触发,在这里检查计数器计数值,并和上次进中断的计数值做差,从而获得一个通道对应的脉宽(单位us),注意一下过零点处理就好 -
前面说过,PPM信号周期最后有一个长时间的低电平,而且两个相邻通道间不一定是紧挨着的。因此
PPM_Decode()直接获得的脉宽不一定是通道数据,需要调用PPM_Cal函数进一步确认。 -
PPM_Cal中首先判断脉宽是否超过5000us(标志一个PPM周期结束),超过了就准备从0通道开始重新记录各通道脉宽;否则,进一步判断脉宽是否在合理范围内(PULSE_MIN~PULSE_MAX),如果都没问题,说明读取到的确实是一个通道数据,给通道看门狗喂狗ch_watch_dog_feed(Chan),并把脉宽记录到RC_PPM.Captures数组中,等待进一步处理。 -
关于通道看门狗的内容稍后再讲
四、SBUS信号模式
1、SBUS介绍
- 简单说,SBUS信号就是一种特殊的UART信号,相比于普通UART信号,SBUS信号经过硬件取反后可以直接用UART控制器处理,注意必须要进行硬件取反,软件取反不行
- 接受串口配置:波特率100k,8位数据位,偶校验,2位停止位,无控流(硬件流控制),25个字节、
- SBUS规定了一个数据传输协议,格式为 [
startbyte] [data1][data2]…[data22][flags][endbyte](帧头、帧尾、标志+22个数据字节,一帧共25字节) - 22个数据字节对应16个通道(ch1-ch16),每个通道11bit(22x8=16x11=176),数据范围在0-2047之间,基本上是1102~1927,中值为1500;
- 更详细的介绍,参见:SBUS协议:SBUS解析与合成
2、硬件连接



3、代码分析
(1)初始化部分
最开始的入口Remote_Control_Init()和PPM是一样的,直接看Drv_SbusInit()
/*******************************************************************************************************************
*函 数 名: Drv_SbusInit
*功能说明: 初始化sbus解码,配置PC6复用UART3功能,UART频率为系统频率80M,波特率100k,8位数据位,2位停止位,偶校验,FIFO深度1/8(16*1/8=2)
*形 参: 无
*返 回 值: 无
*******************************************************************************************************************/
void Drv_SbusInit(void)
{
ROM_SysCtlPeripheralEnable(SBUS_SYSCTL);
ROM_SysCtlPeripheralEnable(SYSCTL_PERIPH_UART3);
/*GPIO的UART模式配置*/
ROM_GPIOPinConfigure(UART3_RX);
ROM_GPIOPinTypeUART( UART3_PORT ,UART3_PIN_RX );
/*配置串口的波特率和时钟源*/
ROM_UARTConfigSetExpClk( SBUS_UART ,SysCtlClockGet(), SBUS_BAUDRATE ,UART_CONFIG_WLEN_8 | UART_CONFIG_STOP_TWO | UART_CONFIG_PAR_EVEN );
/*FIFO设置*/
ROM_UARTFIFOLevelSet( SBUS_UART , UART_FIFO_TX1_8 , UART_FIFO_RX1_8 );
ROM_UARTFIFOEnable(SBUS_UART);
/*使能串口*/
ROM_UARTEnable( SBUS_UART );
/*串口中断配置与使能*/
UARTIntRegister( SBUS_UART , Sbus_IRQHandler );
ROM_IntPrioritySet( INT_UART3 , USER_INT6 );
ROM_UARTIntEnable( SBUS_UART , UART_INT_RX | UART_INT_OE );
}
- 配置PC6复用UART3功能,UART频率为系统频率80M,波特率100k,8位数据位,2位停止位,偶校验,FIFO深度1/8(16*1/8=2)
- 打开了串口接收中断 & 溢出错误中断
- 关于UART的详细介绍,参见TM4C123G学习记录(6)–UART
(2)解码
static void Sbus_IRQHandler(void)
{
uint8_t com_data;
/*获取中断标志 原始中断状态 屏蔽中断标志*/
uint32_t flag = ROM_UARTIntStatus(SBUS_UART,1);
/*清除中断标志*/
ROM_UARTIntClear(SBUS_UART,flag);
ROM_UARTRxErrorClear( SBUS_UART );
/*判断FIFO是否还有数据*/
while(ROM_UARTCharsAvail(SBUS_UART))
{
com_data=UART3->DR;
Sbus_Decode(com_data);
}
}
u16 Rc_Sbus_In[16]; //SBUS接受的数据
u8 sbus_flag;
/*
sbus flags的结构如下所示:
flags:
bit7 = ch17 = digital channel (0x80)
bit6 = ch18 = digital channel (0x40)
bit5 = Frame lost, equivalent red LED on receiver (0x20)
bit4 = failsafe activated (0x10) b: 0001 0000
bit3 = n/a
bit2 = n/a
bit1 = n/a
bit0 = n/a
*/
static void Sbus_Decode(uint8_t data)
{
static uint8_t i;
static uint8_t DataCnt = 0;
static uint8_t SUBS_RawData[25];
/*接收数据*/
SUBS_RawData[DataCnt++]=data;
/*每帧数据长度为25*/
if(DataCnt >= 25)
{
/*判断帧头帧尾是否正确 只要有一个不正确就退出函数*/
if(SUBS_RawData[0] == 0x0F && SUBS_RawData[24] == 0)
{
DataCnt = 0;
Rc_Sbus_In[0] = (s16)(SUBS_RawData[2] & 0x07) << 8 | SUBS_RawData[1]; //data[2]低三位+data[1]八位
Rc_Sbus_In[1] = (s16)(SUBS_RawData[3] & 0x3f) << 5 | (SUBS_RawData[2] >> 3); //data[3]低六位+data[2]高五位
Rc_Sbus_In[2] = (s16)(SUBS_RawData[5] & 0x01) << 10 | ((s16)SUBS_RawData[4] << 2) | (SUBS_RawData[3] >> 6);
Rc_Sbus_In[3] = (s16)(SUBS_RawData[6] & 0x0F) << 7 | (SUBS_RawData[5] >> 1);
Rc_Sbus_In[4] = (s16)(SUBS_RawData[7] & 0x7F) << 4 | (SUBS_RawData[6] >> 4);
Rc_Sbus_In[5] = (s16)(SUBS_RawData[9] & 0x03) << 9 | ((s16)SUBS_RawData[8] << 1) | (SUBS_RawData[7] >> 7);
Rc_Sbus_In[6] = (s16)(SUBS_RawData[10] & 0x1F) << 6 | (SUBS_RawData[9] >> 2);
Rc_Sbus_In[7] = (s16)SUBS_RawData[11] << 3 | (SUBS_RawData[10] >> 5);
Rc_Sbus_In[8] = (s16)(SUBS_RawData[13] & 0x07) << 8 | SUBS_RawData[12];
Rc_Sbus_In[9] = (s16)(SUBS_RawData[14] & 0x3f) << 5 | (SUBS_RawData[13] >> 3);
Rc_Sbus_In[10] = (s16)(SUBS_RawData[16] & 0x01) << 10 | ((s16)SUBS_RawData[15] << 2) | (SUBS_RawData[14] >> 6);
Rc_Sbus_In[11] = (s16)(SUBS_RawData[17] & 0x0F) << 7 | (SUBS_RawData[16] >> 1);
Rc_Sbus_In[12] = (s16)(SUBS_RawData[18] & 0x7F) << 4 | (SUBS_RawData[17] >> 4);
Rc_Sbus_In[13] = (s16)(SUBS_RawData[20] & 0x03) << 9 | ((s16)SUBS_RawData[19] << 1) | (SUBS_RawData[18] >> 7);
Rc_Sbus_In[14] = (s16)(SUBS_RawData[21] & 0x1F) << 6 | (SUBS_RawData[20] >> 2);
Rc_Sbus_In[15] = (s16)SUBS_RawData[22] << 3 | (SUBS_RawData[21] >> 5);
//标志位,低四位保留,位7:6表示两个开关通道(通道17和18)
//位5表示帧丢失,接收机红色LED亮起,我的理解是,如果这一位为1,表示这一帧信号出问题了,接收机红色LED亮起。
//位4表示故障保护激活,意思应该是说如果这一位为1,激活接受方故障保护(失控标记)
sbus_flag = SUBS_RawData[23];
/*一帧数据解析完成*/
//user
if(sbus_flag & 0x10)
{
//如果有数据且能接收到有失控标记,则不处理,转嫁成无数据失控。
}
else
{
//否则有数据就喂狗
for(u8 i = 0;i < 8;i++)//原RC接收程序只设计了8个通道
{
ch_watch_dog_feed(i);
}
}
}
/*帧头或帧尾出错,数据整体前移1位,下一位数据将加入在数组最后再次凑足一帧(25byte)*/
else
{
for( i=0; i<24;i++)
SUBS_RawData[i] = SUBS_RawData[i+1];
DataCnt = 24;
}
}
}
- UART3的FIFO深度配置为2,接收数据时稍微缓冲了一下,然后进入中断服务函数
Sbus_IRQHandler - 在中断函数中,取出收到的每一个字节,调用
Sbus_Decode进行解码。在Sbus_Decode中,先把数据填入SUBS_RawData数组,凑足一帧长度后才能尝试解码。 - 解码时,先判断帧头帧尾,如果不匹配,就把数据整体前移,在末尾添加新数据,直到匹配为止。匹配后就按照SBUS协议进行数据拼接,把数据暂存在
Rc_Sbus_In中等待进一步处理,并且给通道看门狗喂狗ch_watch_dog_feed(Chan) - 关于通道看门狗的内容稍后再讲
*小结
- 到此为止吗,关于PPM和SBUS的接受解码已经讲完了,得到的摇杆数据分别为
RC_PPM.Captures和Rc_Sbus_In - 在带入pid控制前,还要进行两个步骤,一是把取值范围不同的两组数据归一化到同一个范围内,这样在修改接收机模式时不会影响其他参数的选择。二是提高数据的可靠性,毕竟是多旋翼飞行器,一但使用了错误的遥控数据,将会发生灾难性的炸鸡,这是不可接受的,匿名针对这个问题的解决方案是利用“通道看门狗”。
五、通道看门狗
- 所谓通道看门狗,其实和通常指的看门狗功能差不多,就是检查遥控器通道数据读取是否正常,如果数据有问题,就拒绝,从而保证错误的数据不会被带入pid控制
- 这个通道看门狗并不是真正的看门狗,不需要使用看门狗定时器,也不能进行系统复位,只是因为二者功能都是守卫程序正常运行,所以这样称呼而已
1、遥控数据读取和处理任务
//遥控器数据读取和处理
void RC_duty_task(u8 dT_ms) //建议2ms调用一次
{
if(flag.start_ok)
{
/获得通道数据
// if(RC_IN_MODE == PWM)
// {
// for(u8 i=0;i
// {
// if(chn_en_bit & (1<
// {
// CH_N[i] = 1.25f *((s16)Rc_Pwm_In[i] - 1500); //1100 -- 1900us,处理成大约+-500摇杆量
// }
// else
// {
// CH_N[i] = 0;
// }
// CH_N[i] = LIMIT(CH_N[i],-500,500);//限制到+—500
// }
// }
// else if(RC_IN_MODE == PPM)
if(RC_IN_MODE == PPM || RC_IN_MODE == PWM)
{
for(u8 i=0;i<CH_NUM;i++)
{
if(chn_en_bit & (1<<i))//(Rc_Ppm_In[i]!=0)//该通道有值
{
CH_N[i] = ((s16)RC_PPM.Captures[i] - 1500); //1000 -- 2000us,处理成大约+-500摇杆量
}
else
{
CH_N[i] = 0;
}
CH_N[i] = LIMIT(CH_N[i],-500,500);//限制到+—500
}
}
else//sbus
{
for(u8 i=0;i<CH_NUM;i++)
{
if(chn_en_bit & (1<<i))//该通道有值
{
CH_N[i] = 0.65f *((s16)Rc_Sbus_In[i] - 1024); //248 --1024 --1800,处理成大约+-500摇杆量
}
else
{
CH_N[i] = 0;
}
CH_N[i] = LIMIT(CH_N[i],-500,500);//限制到+—500
}
}
///
//解锁监测
unlock(dT_ms);
//摇杆触发功能监测
stick_function(dT_ms);
//通道看门狗
ch_watch_dog(dT_ms);
//失控保护检查
fail_safe_check(dT_ms);//3ms
}
}
- 这里是所有遥控解码函数的入口,同时也进行归一化处理,
RC_PPM.Captures和Rc_Sbus_In都被限制到-500~500之间,处理后的摇杆值存入CH_N数组中,这是将被真正带人pid使用的参数值 - 可以看到
PWM模式和PPM模式实际上是一致的 RC_duty_task()是一个轮询线程,利用系统嘀嗒定时器轮询,每11ms执行一次,参数dT_ms即为此任务执行周期。这里和任务调度相关的以后再说chn_en_bit是一个bit-pack格式的字节,每位标志一个通道的值是否正常(是否有值)- 注意这里调用了看门狗函数
ch_watch_dog(dT_ms),参数是遥控解码任务周期时长
2、通道看门狗
static u16 cwd_cnt[10] ; //通道看门狗计时
u8 chn_en_bit = 0; //标志哪些通道正常
//给通道看门狗喂狗
void ch_watch_dog_feed(u8 ch_n)
{
ch_n = LIMIT(ch_n,0,7);
cwd_cnt[ch_n] = 0;
}
//检查通道看门狗,dT_ms是调用时间间隔(调用周期,这里为11ms)
static void ch_watch_dog(u8 dT_ms)//如果是PPM/SBUS模式,也只检测前8通道
{
for(u8 i = 0;i<8;i++)
{
//看门狗计数小于500(数据更新周期小于500ms),认为通道接收正常,计时增加,给chn_en_bit中对应位标记正常
if(cwd_cnt[i]<500)
{
cwd_cnt[i] += dT_ms;
chn_en_bit |= 0x01<<i;
}
//否则认定通道不正常,chn_en_bit中对应位标记0
else
{
chn_en_bit &= ~(0x01<<i);
// Rc_Pwm_In[i] = 0; //把捕获值复位
// Rc_Ppm_In[i] = 0;
// Rc_Sbus_In[i] = 0;
}
}
}
- 程序注释已经写得比较清楚了,这个看门狗的原理,就是每次调用解码任务时把周期时间
dT_ms加到每个通道对应的看门狗计时器cwd_cnt中,代表此通道的值多久没更新了(注意在解码部分,每个通道解码成功后都会调用ch_watch_dog_feed喂狗,清空对应通道的看门狗计时器)。如果未更新时间小于500ms,认为值没问题,给chn_en_bit对应位置1;否则认为此通道无值,给chn_en_bit对应位置0,。
以上是我目前的理解,可能有误,欢迎交流