仿射变换(Affine Transformation)原理及应用(1)
仿射变换(Affine Transformation)原理及应用
文章目录
- 1 什么是仿射变换
- 2 仿射变换数学表达
- 3 仿射变换理解
- 3.1 平移变换
- 3.2 反射变换
- 3.3 旋转变换
- 3.4 opencv中的仿射矩阵
- 4 参考文献
1 什么是仿射变换
-
仿射变换(Affine Transformation)其实是另外两种简单变换的叠加:一个是线性变换,一个是平移变换
-
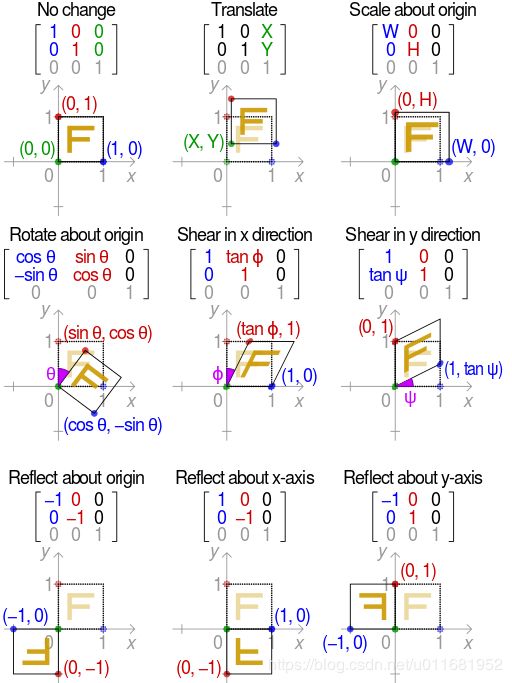
仿射变换变化包括缩放(Scale、平移(transform)、旋转(rotate)、反射(reflection,对图形照镜子)、错切(shear mapping,感觉像是一个图形的倒影),原来的直线仿射变换后还是直线,原来的平行线经过仿射变换之后还是平行线,这就是仿射
-
仿射变换中集合中的一些性质保持不变:
(1)凸性
(2)共线性:若几个点变换前在一条线上,则仿射变换后仍然在一条线上
(3)平行性:若两条线变换前平行,则变换后仍然平行
(4)共线比例不变性:变换前一条线上两条线段的比例,在变换后比例不变
2 仿射变换数学表达
一个集合 XX 的仿射变换为:
f ( x ) = A x + b , x ∈ X f(x)=Ax+b, \quad x\in X f(x)=Ax+b,x∈X
仿射变换是二维平面中一种重要的变换,在图像图形领域有广泛的应用,在二维图像变换中,一般表达为:
[ x ′ y ′ 1 ] = [ R 00 R 01 T x R 10 R 11 T y 0 0 1 ] [ x y 1 ] \begin{bmatrix} x' \\ y' \\ 1 \\ \end{bmatrix}= \begin{bmatrix} R_{00}&R_{01}&T_x \\ R_{10}&R_{11}&T_y \\ 0& 0& 1 \\ \end{bmatrix} \begin{bmatrix} x \\ y \\ 1 \\ \end{bmatrix} ⎣⎡x′y′1⎦⎤=⎣⎡R00R100R01R110TxTy1⎦⎤⎣⎡xy1⎦⎤
可以视为线性变换R和平移变换T的叠加
3 仿射变换理解
要熟练应用仿射变换,则需先理解仿射变换,说白了就是要弄清楚上面的R,T矩阵各个参数代表什么含义,用图像来表达:
3.1 平移变换
不难想象,就是将x,y平移指定值,则R矩阵为单位矩阵,T矩阵为指定值,如上图中,第一行第二列图
M = [ 1 0 T x 0 1 T y 0 0 1 ] M=\begin{bmatrix} 1&0&T_x \\ 0&1&T_y \\ 0& 0& 1 \\ \end{bmatrix} M=⎣⎡100010TxTy1⎦⎤
3.2 反射变换
见图最后一行,如相对x轴放射,则x不变,y变为相反号
M = [ 1 0 0 0 − 1 0 0 0 1 ] M=\begin{bmatrix} 1&0&0 \\ 0&-1&0 \\ 0& 0& 1 \\ \end{bmatrix} M=⎣⎡1000−10001⎦⎤
3.3 旋转变换
关于旋转矩阵,这里详细来看看,网上博客中,有朋友在疑惑旋转矩阵中, s i n θ sin\theta sinθ的负号位置问题,下面我谈谈我个人想法,若有错误请大家指点。为简单起见,只从一个点的旋转来看
(1) 左下角为坐标原点

- 坐标原点为左下角
- 点 P ( x , y ) P(x,y) P(x,y)为坐标系中一个点,与x轴的夹角为 α \alpha α,假设其到原点的距离为1(方便计算)
- 点 P ′ ( x ′ , y ′ ) P'(x',y') P′(x′,y′)为P点逆时针旋转 θ \theta θ角度的点
- 点 P ′ ′ ( x ′ ′ , y ′ ′ ) P''(x'',y'') P′′(x′′,y′′)为P点顺时针旋转 θ \theta θ角度的点
根据简单三角关系,可知
{ x = c o s α y = s i n α \begin{cases} x = cos\alpha\\ y = sin\alpha \end{cases} {x=cosαy=sinα
逆时针时:
{ x ′ = c o s ( α + θ ) = c o s α ∗ c o s θ − s i n α ∗ s i n θ = x ∗ c o s θ − y ∗ s i n θ y ′ = s i n ( α + θ ) = s i n α ∗ c o s θ + c o s α ∗ s i n θ = y ∗ c o s θ + x ∗ s i n θ \begin{cases} x' = cos(\alpha + \theta) = cos\alpha * cos\theta - sin\alpha*sin\theta = x* cos\theta - y*sin\theta \\ y' = sin(\alpha + \theta) = sin\alpha * cos\theta + cos\alpha*sin\theta = y* cos\theta + x*sin\theta \end{cases} {x′=cos(α+θ)=cosα∗cosθ−sinα∗sinθ=x∗cosθ−y∗sinθy′=sin(α+θ)=sinα∗cosθ+cosα∗sinθ=y∗cosθ+x∗sinθ
则,逆时针旋转矩阵 R ′ R' R′为:
R ′ = [ c o s θ − s i n θ s i n θ c o s θ ] R'= \begin{bmatrix} cos\theta&-sin\theta\\ sin\theta&cos\theta\\ \end{bmatrix} R′=[cosθsinθ−sinθcosθ]
顺时针时:
{ x ′ ′ = c o s ( α − θ ) = c o s α ∗ c o s θ + s i n α ∗ s i n θ = x ∗ c o s θ + y ∗ s i n θ y ′ ′ = s i n ( α − θ ) = s i n α ∗ c o s θ − c o s α ∗ s i n θ = y ∗ c o s θ − x ∗ s i n θ \begin{cases} x'' = cos(\alpha - \theta) = cos\alpha * cos\theta + sin\alpha*sin\theta = x* cos\theta + y*sin\theta \\ y'' = sin(\alpha - \theta) = sin\alpha * cos\theta - cos\alpha*sin\theta = y* cos\theta - x*sin\theta \end{cases} {x′′=cos(α−θ)=cosα∗cosθ+sinα∗sinθ=x∗cosθ+y∗sinθy′′=sin(α−θ)=sinα∗cosθ−cosα∗sinθ=y∗cosθ−x∗sinθ
则,顺时针旋转矩阵 R ′ ′ R'' R′′为:
R ′ ′ = [ c o s θ s i n θ − s i n θ c o s θ ] R''= \begin{bmatrix} cos\theta&sin\theta\\ -sin\theta&cos\theta\\ \end{bmatrix} R′′=[cosθ−sinθsinθcosθ]
从上可以看出,这个负号位置问题,个人认为与旋转方向相关
(2)左上角为坐标原点

- 坐标原点为左上角
- 点 P ( x , y ) P(x,y) P(x,y)为坐标系中一个点,与x轴的夹角为 α \alpha α,假设其到原点的距离为1(方便计算)
- 点 P ′ ( x ′ , y ′ ) P'(x',y') P′(x′,y′)为P点逆时针旋转 θ \theta θ角度的点
- 点 P ′ ′ ( x ′ ′ , y ′ ′ ) P''(x'',y'') P′′(x′′,y′′)为P点顺时针旋转 θ \theta θ角度的点
根据简单三角关系,可知
{ x = c o s α y = s i n α \begin{cases} x = cos\alpha\\ y = sin\alpha \end{cases} {x=cosαy=sinα
逆时针时:
{ x ′ = c o s ( α − θ ) = c o s α ∗ c o s θ + s i n α ∗ s i n θ = x ∗ c o s θ + y ∗ s i n θ y ′ = s i n ( α − θ ) = s i n α ∗ c o s θ − c o s α ∗ s i n θ = y ∗ c o s θ − x ∗ s i n θ \begin{cases} x' = cos(\alpha - \theta) = cos\alpha * cos\theta + sin\alpha*sin\theta = x* cos\theta + y*sin\theta \\ y' = sin(\alpha - \theta) = sin\alpha * cos\theta - cos\alpha*sin\theta = y* cos\theta - x*sin\theta \end{cases} {x′=cos(α−θ)=cosα∗cosθ+sinα∗sinθ=x∗cosθ+y∗sinθy′=sin(α−θ)=sinα∗cosθ−cosα∗sinθ=y∗cosθ−x∗sinθ
则,逆时针旋转矩阵 R ′ R' R′为:
R ′ = [ c o s θ s i n θ − s i n θ c o s θ ] R'= \begin{bmatrix} cos\theta&sin\theta\\ -sin\theta&cos\theta\\ \end{bmatrix} R′=[cosθ−sinθsinθcosθ]
顺时针时:
{ x ′ ′ = c o s ( α + θ ) = c o s α ∗ c o s θ − s i n α ∗ s i n θ = x ∗ c o s θ − y ∗ s i n θ y ′ ′ = s i n ( α + θ ) = s i n α ∗ c o s θ + c o s α ∗ s i n θ = y ∗ c o s θ + x ∗ s i n θ \begin{cases} x'' = cos(\alpha + \theta) = cos\alpha * cos\theta - sin\alpha*sin\theta = x* cos\theta - y*sin\theta \\ y'' = sin(\alpha + \theta) = sin\alpha * cos\theta + cos\alpha*sin\theta = y* cos\theta + x*sin\theta \end{cases} {x′′=cos(α+θ)=cosα∗cosθ−sinα∗sinθ=x∗cosθ−y∗sinθy′′=sin(α+θ)=sinα∗cosθ+cosα∗sinθ=y∗cosθ+x∗sinθ
则,顺时针旋转矩阵 R ′ ′ R'' R′′为:
R ′ ′ = [ c o s θ − s i n θ s i n θ c o s θ ] R''= \begin{bmatrix} cos\theta&-sin\theta\\ sin\theta&cos\theta\\ \end{bmatrix} R′′=[cosθsinθ−sinθcosθ]
从上可以看出,这个负号位置问题,不但与旋转方向有关,还与原点有关
(3)总结
- 旋转矩阵R中, s i n θ sin\theta sinθ的负号位置与旋转方向和原点相关
- 当记逆时针为正,左上角为原点时(opencv默认),旋转矩阵为:
R = [ c o s θ s i n θ − s i n θ c o s θ ] R= \begin{bmatrix} cos\theta&sin\theta\\ -sin\theta&cos\theta\\ \end{bmatrix} R=[cosθ−sinθsinθcosθ]
3.4 opencv中的仿射矩阵
getRotationMatrix2D函数
CV_EXPORTS_W Mat getRotationMatrix2D( Point2f center, double angle, double scale )
该函数是来计算仿射矩阵:
[ α β ( 1 − α ) ⋅ center.x − β ⋅ center.y − β α β ⋅ center.x + ( 1 − α ) ⋅ center.y ] \begin{bmatrix} \alpha & \beta & (1- \alpha ) \cdot \texttt{center.x} - \beta \cdot \texttt{center.y} \\ - \beta & \alpha & \beta \cdot \texttt{center.x} + (1- \alpha ) \cdot \texttt{center.y} \end{bmatrix} [α−ββα(1−α)⋅center.x−β⋅center.yβ⋅center.x+(1−α)⋅center.y]
其中
α = scale ⋅ cos angle , β = scale ⋅ sin angle \begin{array}{l} \alpha = \texttt{scale} \cdot \cos \texttt{angle} , \\ \beta = \texttt{scale} \cdot \sin \texttt{angle} \end{array} α=scale⋅cosangle,β=scale⋅sinangle
-
center:源图旋转中心
-
angle: 旋转角度,用角度表示;逆时针旋转为正(坐标原点设为左上角)
Rotation angle in degrees. Positive values mean counter-clockwise rotation (thecoordinate origin is assumed to be the top-left corner). -
scale:各向同比缩放因子
-
源码
cv::Mat cv::getRotationMatrix2D( Point2f center, double angle, double scale ) { CV_INSTRUMENT_REGION(); angle *= CV_PI/180; double alpha = std::cos(angle)*scale; double beta = std::sin(angle)*scale; Mat M(2, 3, CV_64F); double* m = M.ptr(); m[0] = alpha; m[1] = beta; m[2] = (1-alpha)*center.x - beta*center.y; m[3] = -beta; m[4] = alpha; m[5] = beta*center.x + (1-alpha)*center.y; return M; } -
矩阵由来:首先将轴心(x,y)移到原点,然后做旋转缩放变换,最后再将图像的左上角转换为原点
M = [ 1 0 x 0 1 y 0 0 1 ] [ c o s θ s i n θ 0 − s i n θ c o s θ 0 0 0 1 ] [ s 0 0 0 s 0 0 0 1 ] [ 1 0 − x 0 1 − y 0 0 1 ] M= \begin{bmatrix} 1 & 0 &x \\ 0&1 & y\\ 0& 0 &1 \end{bmatrix} \begin{bmatrix} cos\theta &sin\theta &0 \\ -sin\theta & cos\theta & 0\\ 0 & 0 & 1 \end{bmatrix} \begin{bmatrix} s & 0 & 0\\ 0&s & 0\\ 0 &0 & 1 \end{bmatrix} \begin{bmatrix} 1 & 0 & -x\\ 0 & 1 &-y \\ 0& 0 & 1 \end{bmatrix} M=⎣⎡100010xy1⎦⎤⎣⎡cosθ−sinθ0sinθcosθ0001⎦⎤⎣⎡s000s0001⎦⎤⎣⎡100010−x−y1⎦⎤
4 参考文献
[1]仿射变换详解 warpAffine :https://www.cnblogs.com/dupuleng/articles/4055020.html
[2]仿射变换(Affine transformation): https://blog.csdn.net/robert_chen1988/article/details/80498805
[3]opencv学习(三十五)之仿射变换warpAffine: https://blog.csdn.net/keith_bb/article/details/56331356