四足蜘蛛机器人--制作过程记录
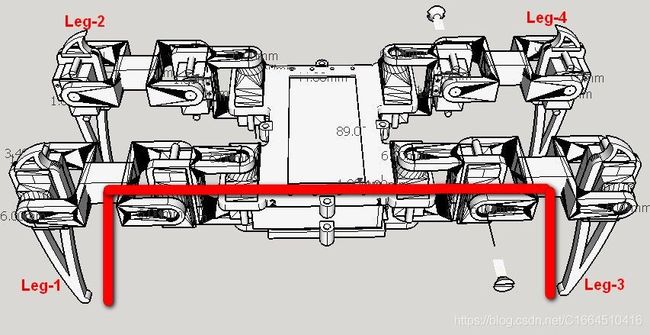
更新:老有人问舵机的编号,https://www.instructables.com/id/DIY-Spider-RobotQuad-robot-Quadruped/
原作者链接里面什么都有,有些人他就不看。不过这网站国内链接比较慢,我把那个图放在这了。
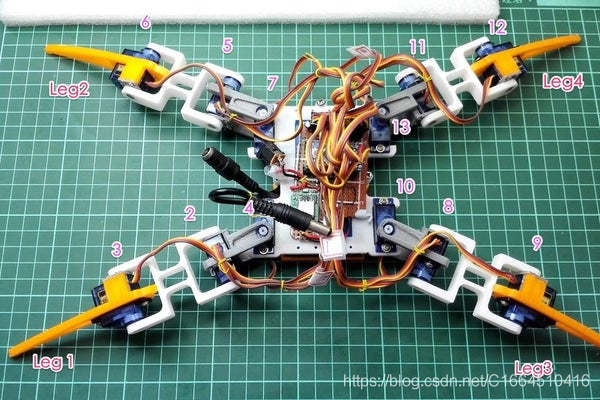
还有一个就是才开始安装,是这样的:
这是安装的舵机校正程序,就是把舵机都运动到90度,有需要自己下载:
https://wwa.lanzous.com/iQE8xfc380d 密码:e9r4
这是机器人的实物视频,UP是和我的同学,和我一起做的这个:https://www.bilibili.com/video/BV1Mb41127E6
===================================================================================
这学期我们开单片机的课,有个玩的好的朋友买了一个3D打印机,想搞点东西出来玩玩。我们商量了一下,决定做一个机器人,材料啥的越少越好,于是就决定做一个四足的蜘蛛机器人熟悉一下书本上的知识。
成品是这样的:

这个项目是参照网上的蜘蛛机器人做的,我们给小机器人加了一个蓝牙模块,可以通过手机进行遥控。
该项目原作者:https://www.thingiverse.com/thing:1009659(所需要的资料这个链接里面都有)
下面是机器人的需要的材料:
1.Arduino Nano 控制板
2.Nano 扩展板
3.电池盒
4.9g舵机12个
5.3D打印骨架(STL文件:https://download.csdn.net/download/c1664510416/11128822)
6.HC-06 蓝牙控制板
7.蓝牙调试串口APP(https://download.csdn.net/download/c1664510416/10701781)
目前机器人的部分程序还没有完成,写完之后会更新出来的。
----------------------------------------------------------------------------------------------------------------------------------------------------------------------
2019年5月8日更新:
有网友说字符串处理的库找不到,所以放在这里,需要的自取:
https://www.lanzous.com/i42y87a
-----------------------------------------------------------------------------------------------------------------------------------------------------------------------
2018年12月11日更新:
四足运动代码(arduino):
/*项目名称:遥控蜘蛛机器人
*作者:小川子,许康元
*日期:2018/09/30
*参考:Sunfounder设计的爬行机器人
*概述:通过组装蜘蛛机器人,感受Arduino的控制魅力,与单片机的强大。通过实践感受到自己能力的欠缺之处。
*---该项目前期是用Arduino UNO进行制作的,但是由于UNO 太大了,于是在项目完成之后改用 Nano
* 进行重新组装
*---在安装机器人没有问题后再进行本程序的调试
*---该程序动作函数参考Sunfounder设计的爬行机器人的演示代码
*---请确保正确安装了库文件
*/
//库函数----------------------------------------------------------------------
#include //舵机控制库
#include //设置定时器去同时控制多个舵机
#include //处理串行命令的库
SerialCommand SCmd;
// C 0 1: stand
// C 0 0: sit
// C 1 x: forward x step
// C 2 x: back x step
// C 3 x: right turn x step
// C 4 x: left turn x step
// C 5 x: hand shake x times
// C 6 x: hand wave x times
#define C_STAND_SIT 0
#define C_FORWARD 1
#define C_BACKWARD 2
#define C_LEFT 3
#define C_RIGHT 4
#define C_SHAKE 5
#define C_WAVE 6
#define S_STRAIGHT 1
#define S_BACK 2
//舵机对象--------4条腿 每条腿3个舵机 一共12个舵机------------------------------
Servo servo[4][3];
//设置信号输出引脚
const int servo_pin[4][3] = { {2, 3, 4}, {5, 6, 7}, {8, 9, 10}, {11, 12, 13} };
/* 机器的尺寸和大小 ---------------------------------------------------------*/
const float length_a = 55;
const float length_b = 77.5;
const float length_c = 27.5;
const float length_side = 71;
const float z_absolute = -28;
/* 运动常量
----------------------------------------------------*/
const float z_default = -40, z_up = 90, z_boot = z_absolute;
const float x_default = 62, x_offset = 0;
const float y_start = 0, y_step = 40;
const float y_default = x_default;
int In1 = A1;
int In2 = A2;
int In3 = A3;
int In4 = A4;
int EnA = A0;
int EnB = A5;
int Check_angle=1;
int straiht_angle=180;
/* 运动变量
----------------------------------------------------*/
volatile float site_now[4][3]; //每只脚到末端的实时距离
volatile float site_expect[4][3]; //预计每只脚到末端的实时距离
float temp_speed[4][3]; //每个轴的速度 注意:需要在每次运动前重新计算
float speed_multiple = 1; //动作速度执行倍数
const float spot_turn_speed = 4; //转动速度
const float leg_move_speed = 8; //每条腿的移动速度
const float body_move_speed = 3; //身体移动速度
const float stand_seat_speed = 1; //站位速度
volatile int rest_counter; //+1/0.02s, 自动停机时间
//函数传递时用的参数
const float KEEP = 255;
float move_speed=leg_move_speed; //动作速度
//π值
const float pi = 3.1415926;
/* 转动常量
--------------------------------------------------------*/
//临时长度
const float temp_a = sqrt(pow(2 * x_default + length_side, 2) + pow(y_step, 2));
const float temp_b = 2 * (y_start + y_step) + length_side;
const float temp_c = sqrt(pow(2 * x_default + length_side, 2) + pow(2 * y_start + y_step + length_side, 2));
const float temp_alpha = acos((pow(temp_a, 2) + pow(temp_b, 2) - pow(temp_c, 2)) / 2 / temp_a / temp_b);
//site for turn
const float turn_x1 = (temp_a - length_side) / 2;
const float turn_y1 = y_start + y_step / 2;
const float turn_x0 = turn_x1 - temp_b * cos(temp_alpha);
const float turn_y0 = temp_b * sin(temp_alpha) - turn_y1 - length_side;
/* ---------------------------------------------------------------------------*/
//初始化函数
void setup()
{
//启动串口
Serial.begin(9600);
Serial.println("Robot Starts Initialization");
SCmd.addCommand("c", control_model);
SCmd.addCommand("d",speed_set);
//SCmd.addCommand("O",obstacle_model);
//SCmd.addCommand("F",follow_model);
SCmd.addCommand("s",straight_model);
SCmd.setDefaultHandler(unrecognized);
//初始4条腿的初始大小
set_site(0, x_default - x_offset, y_start + y_step,z_boot);
set_site(1, x_default - x_offset, y_start + y_step,z_boot);
set_site(2, x_default + x_offset, y_start,z_boot);
set_site(3, x_default + x_offset, y_start,z_boot);
for (int i = 0; i < 4; i++)
{
for (int j = 0; j < 3; j++)
{
site_now[i][j] = site_expect[i][j];
}
}
//启动舵机控制服务(设置定时器)
FlexiTimer2::set(20, servo_service);
FlexiTimer2::start(); //开始定时器
Serial.println("Servo service strated");
//初始化舵机
servo_attach();//设置舵机接口函数
Serial.println("Servos Initialized");
Serial.println("Robot initialization Complete");
//直流电机初始化
straight_attach();
Serial.println("Straight Initialized");
}
void servo_attach(void) //设置舵机连接串口
{
for (int i = 0; i < 4; i++) //4条腿
{
for (int j = 0; j < 3; j++) //每条腿3个舵机
{
servo[i][j].attach(servo_pin[i][j]); //设定舵机的接口
delay(100); //等待100毫秒
}
}
}
void servo_detach(void) //舵机分离串口
{
for (int i = 0; i < 4; i++) //4条腿
{
for (int j = 0; j < 3; j++) //每条腿3个舵机
{
servo[i][j].detach(); //使舵机与其接口分离
delay(100); //等待100毫秒
}
}
}
//主循环函数接受外部数据
void loop(){
SCmd.readSerial();
}
//检测舵机是否达到直流电机运动角度
int check_angel(void){
if(straiht_angle==0)
return 1;
else
return 0;
}
//设置直流电机运动四足角度
void set_angle(void){
set_site(0, x_default + x_offset, y_start , 20);
set_site(1, x_default + x_offset, y_start , 20);
set_site(2, x_default + x_offset, y_start , 20);
set_site(3, x_default + x_offset, y_start , 20);
for (int i = 0; i < 4; i++)
{
for (int j = 0; j < 3; j++)
{
site_now[i][j] = site_expect[i][j];
}
}
straiht_angle=0;
}
//设置运动速率
void speed_set(void){
char *arg;
int set_speed,no_do;
Serial.println("Action:");
arg = SCmd.next();
set_speed= atoi(arg);
speed_multiple=set_speed;
arg = SCmd.next();
no_do = atoi(arg);
}
//串口库函数的默认错误调用函数
void unrecognized(const char *command) {
Serial.println("What?");
}
//设置直流电机接口
void straight_attach(void){
pinMode(In1,OUTPUT);
pinMode(In2,OUTPUT);
pinMode(In3,OUTPUT);
pinMode(In4,OUTPUT);
}
//直行模式
void straight_model(void){
char *arg;
int action_model,no_do;
Serial.println("Action:");
arg = SCmd.next();
action_model= atoi(arg);
arg = SCmd.next();
no_do = atoi(arg);
switch(action_model){
case S_STRAIGHT:
Serial.println("Straight Format");
analogWrite(EnA,255);
analogWrite(EnB,255);
sit();
if(!check_angel()){
set_angle();
}
s_straight();
break;
case S_BACK:
Serial.println("Straight Back");
analogWrite(EnA,255);
analogWrite(EnB,255);
sit();
if(!check_angel()){
set_angle();
}
s_back();
break;
default:
Serial.println("Undefine");
break;
}
}
//直流电机前进
void s_straight(void){
digitalWrite(In1,HIGH);
digitalWrite(In2,LOW);
digitalWrite(In3,LOW);
digitalWrite(In4,HIGH);
}
//直流电机退后
void s_back(void){
digitalWrite(In1,LOW);
digitalWrite(In2,HIGH);
digitalWrite(In3,HIGH);
digitalWrite(In4,LOW);
}
//直流电机制动
void s_stop(void){
straiht_angle=180;
digitalWrite(In1,LOW);
digitalWrite(In2,LOW);
digitalWrite(In3,LOW);
digitalWrite(In4,LOW);
}
//循迹模式
void follow_model(void){
}
//避障模式
void obstacle_model(void)
{
}
//控制模式
void control_model(void)
{
char *arg;
int action_mode, n_step; //动作模式,移动步数
Serial.println("Action:");
arg = SCmd.next();
action_mode = atoi(arg);
arg = SCmd.next();
n_step = atoi(arg);
switch (action_mode)
{
case C_FORWARD:
Serial.println("Step forward");
if (!is_stand()){
stand();
}
s_stop();
step_forward(n_step);
break;
case C_BACKWARD:
Serial.println("Step back");
if (!is_stand()){
stand();
}
s_stop();
step_back(n_step);
break;
case C_LEFT:
Serial.println("Turn left");
if (!is_stand())
stand();
s_stop();
turn_left(n_step);
break;
case C_RIGHT:
Serial.println("Turn right");
if (!is_stand())
stand();
s_stop();
turn_right(n_step);
break;
case C_STAND_SIT:
Serial.println("1:up,0:dn");
if (n_step){
s_stop();
stand();
} else{
s_stop();
sit();
}
break;
case C_SHAKE:
Serial.println("Hand shake");
s_stop();
hand_shake(n_step);
break;
case C_WAVE:
Serial.println("Hand wave");
s_stop();
hand_wave(n_step);
break;
default:
Serial.println("Error");
break;
}
}
//是否站立
bool is_stand(void)
{
if (site_now[0][2] == z_default)
return true;
else
return false;
}
//坐下
void sit(void)
{
move_speed = stand_seat_speed;
for (int leg = 0; leg < 4; leg++)
{
set_site(leg, KEEP, KEEP, z_boot);
}
wait_all_reach();
}
//站立
void stand(void)
{
move_speed = stand_seat_speed;
for (int leg = 0; leg < 4; leg++)
{
set_site(leg, KEEP, KEEP, z_default);
}
wait_all_reach();
}
//左转
void turn_left(unsigned int step)
{
move_speed = spot_turn_speed;
while (step-- > 0)
{
if (site_now[3][1] == y_start)
{
//leg 3&1 move
set_site(3, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(0, turn_x1 - x_offset, turn_y1, z_default);
set_site(1, turn_x0 - x_offset, turn_y0, z_default);
set_site(2, turn_x1 + x_offset, turn_y1, z_default);
set_site(3, turn_x0 + x_offset, turn_y0, z_up);
wait_all_reach();
set_site(3, turn_x0 + x_offset, turn_y0, z_default);
wait_all_reach();
set_site(0, turn_x1 + x_offset, turn_y1, z_default);
set_site(1, turn_x0 + x_offset, turn_y0, z_default);
set_site(2, turn_x1 - x_offset, turn_y1, z_default);
set_site(3, turn_x0 - x_offset, turn_y0, z_default);
wait_all_reach();
set_site(1, turn_x0 + x_offset, turn_y0, z_up);
wait_all_reach();
set_site(0, x_default + x_offset, y_start, z_default);
set_site(1, x_default + x_offset, y_start, z_up);
set_site(2, x_default - x_offset, y_start + y_step, z_default);
set_site(3, x_default - x_offset, y_start + y_step, z_default);
wait_all_reach();
set_site(1, x_default + x_offset, y_start, z_default);
wait_all_reach();
}
else
{
//leg 0&2 move
set_site(0, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(0, turn_x0 + x_offset, turn_y0, z_up);
set_site(1, turn_x1 + x_offset, turn_y1, z_default);
set_site(2, turn_x0 - x_offset, turn_y0, z_default);
set_site(3, turn_x1 - x_offset, turn_y1, z_default);
wait_all_reach();
set_site(0, turn_x0 + x_offset, turn_y0, z_default);
wait_all_reach();
set_site(0, turn_x0 - x_offset, turn_y0, z_default);
set_site(1, turn_x1 - x_offset, turn_y1, z_default);
set_site(2, turn_x0 + x_offset, turn_y0, z_default);
set_site(3, turn_x1 + x_offset, turn_y1, z_default);
wait_all_reach();
set_site(2, turn_x0 + x_offset, turn_y0, z_up);
wait_all_reach();
set_site(0, x_default - x_offset, y_start + y_step, z_default);
set_site(1, x_default - x_offset, y_start + y_step, z_default);
set_site(2, x_default + x_offset, y_start, z_up);
set_site(3, x_default + x_offset, y_start, z_default);
wait_all_reach();
set_site(2, x_default + x_offset, y_start, z_default);
wait_all_reach();
}
}
}
// - 右转
void turn_right(unsigned int step)
{
move_speed = spot_turn_speed;
while (step-- > 0)
{
if (site_now[2][1] == y_start)
{
//leg 2&0 move
set_site(2, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(0, turn_x0 - x_offset, turn_y0, z_default);
set_site(1, turn_x1 - x_offset, turn_y1, z_default);
set_site(2, turn_x0 + x_offset, turn_y0, z_up);
set_site(3, turn_x1 + x_offset, turn_y1, z_default);
wait_all_reach();
set_site(2, turn_x0 + x_offset, turn_y0, z_default);
wait_all_reach();
set_site(0, turn_x0 + x_offset, turn_y0, z_default);
set_site(1, turn_x1 + x_offset, turn_y1, z_default);
set_site(2, turn_x0 - x_offset, turn_y0, z_default);
set_site(3, turn_x1 - x_offset, turn_y1, z_default);
wait_all_reach();
set_site(0, turn_x0 + x_offset, turn_y0, z_up);
wait_all_reach();
set_site(0, x_default + x_offset, y_start, z_up);
set_site(1, x_default + x_offset, y_start, z_default);
set_site(2, x_default - x_offset, y_start + y_step, z_default);
set_site(3, x_default - x_offset, y_start + y_step, z_default);
wait_all_reach();
set_site(0, x_default + x_offset, y_start, z_default);
wait_all_reach();
}
else
{
//leg 1&3 move
set_site(1, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(0, turn_x1 + x_offset, turn_y1, z_default);
set_site(1, turn_x0 + x_offset, turn_y0, z_up);
set_site(2, turn_x1 - x_offset, turn_y1, z_default);
set_site(3, turn_x0 - x_offset, turn_y0, z_default);
wait_all_reach();
set_site(1, turn_x0 + x_offset, turn_y0, z_default);
wait_all_reach();
set_site(0, turn_x1 - x_offset, turn_y1, z_default);
set_site(1, turn_x0 - x_offset, turn_y0, z_default);
set_site(2, turn_x1 + x_offset, turn_y1, z_default);
set_site(3, turn_x0 + x_offset, turn_y0, z_default);
wait_all_reach();
set_site(3, turn_x0 + x_offset, turn_y0, z_up);
wait_all_reach();
set_site(0, x_default - x_offset, y_start + y_step, z_default);
set_site(1, x_default - x_offset, y_start + y_step, z_default);
set_site(2, x_default + x_offset, y_start, z_default);
set_site(3, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(3, x_default + x_offset, y_start, z_default);
wait_all_reach();
}
}
}
//前进
void step_forward(unsigned int step)
{
move_speed = leg_move_speed;
while (step-- > 0)
{
if (site_now[2][1] == y_start)
{
//leg 2&1 move
set_site(2, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(2, x_default + x_offset, y_start + 2 * y_step, z_up);
wait_all_reach();
set_site(2, x_default + x_offset, y_start + 2 * y_step, z_default);
wait_all_reach();
move_speed = body_move_speed;
set_site(0, x_default + x_offset, y_start, z_default);
set_site(1, x_default + x_offset, y_start + 2 * y_step, z_default);
set_site(2, x_default - x_offset, y_start + y_step, z_default);
set_site(3, x_default - x_offset, y_start + y_step, z_default);
wait_all_reach();
move_speed = leg_move_speed;
set_site(1, x_default + x_offset, y_start + 2 * y_step, z_up);
wait_all_reach();
set_site(1, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(1, x_default + x_offset, y_start, z_default);
wait_all_reach();
}
else
{
//leg 0&3 move
set_site(0, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(0, x_default + x_offset, y_start + 2 * y_step, z_up);
wait_all_reach();
set_site(0, x_default + x_offset, y_start + 2 * y_step, z_default);
wait_all_reach();
move_speed = body_move_speed;
set_site(0, x_default - x_offset, y_start + y_step, z_default);
set_site(1, x_default - x_offset, y_start + y_step, z_default);
set_site(2, x_default + x_offset, y_start, z_default);
set_site(3, x_default + x_offset, y_start + 2 * y_step, z_default);
wait_all_reach();
move_speed = leg_move_speed;
set_site(3, x_default + x_offset, y_start + 2 * y_step, z_up);
wait_all_reach();
set_site(3, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(3, x_default + x_offset, y_start, z_default);
wait_all_reach();
}
}
}
//后退
void step_back(unsigned int step)
{
move_speed = leg_move_speed;
while (step-- > 0)
{
if (site_now[3][1] == y_start)
{
//leg 3&0 move
set_site(3, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(3, x_default + x_offset, y_start + 2 * y_step, z_up);
wait_all_reach();
set_site(3, x_default + x_offset, y_start + 2 * y_step, z_default);
wait_all_reach();
move_speed = body_move_speed;
set_site(0, x_default + x_offset, y_start + 2 * y_step, z_default);
set_site(1, x_default + x_offset, y_start, z_default);
set_site(2, x_default - x_offset, y_start + y_step, z_default);
set_site(3, x_default - x_offset, y_start + y_step, z_default);
wait_all_reach();
move_speed = leg_move_speed;
set_site(0, x_default + x_offset, y_start + 2 * y_step, z_up);
wait_all_reach();
set_site(0, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(0, x_default + x_offset, y_start, z_default);
wait_all_reach();
}
else
{
//leg 1&2 move
set_site(1, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(1, x_default + x_offset, y_start + 2 * y_step, z_up);
wait_all_reach();
set_site(1, x_default + x_offset, y_start + 2 * y_step, z_default);
wait_all_reach();
move_speed = body_move_speed;
set_site(0, x_default - x_offset, y_start + y_step, z_default);
set_site(1, x_default - x_offset, y_start + y_step, z_default);
set_site(2, x_default + x_offset, y_start + 2 * y_step, z_default);
set_site(3, x_default + x_offset, y_start, z_default);
wait_all_reach();
move_speed = leg_move_speed;
set_site(2, x_default + x_offset, y_start + 2 * y_step, z_up);
wait_all_reach();
set_site(2, x_default + x_offset, y_start, z_up);
wait_all_reach();
set_site(2, x_default + x_offset, y_start, z_default);
wait_all_reach();
}
}
}
//身体左倾
void body_left(int i)
{
set_site(0, site_now[0][0] + i, KEEP, KEEP);
set_site(1, site_now[1][0] + i, KEEP, KEEP);
set_site(2, site_now[2][0] - i, KEEP, KEEP);
set_site(3, site_now[3][0] - i, KEEP, KEEP);
wait_all_reach();
}
//身体右倾
void body_right(int i)
{
set_site(0, site_now[0][0] - i, KEEP, KEEP);
set_site(1, site_now[1][0] - i, KEEP, KEEP);
set_site(2, site_now[2][0] + i, KEEP, KEEP);
set_site(3, site_now[3][0] + i, KEEP, KEEP);
wait_all_reach();
}
//摇手
void hand_wave(int i)
{
float x_tmp;
float y_tmp;
float z_tmp;
move_speed = 1;
if (site_now[3][1] == y_start)
{
body_right(15);
x_tmp = site_now[2][0];
y_tmp = site_now[2][1];
z_tmp = site_now[2][2];
move_speed = body_move_speed;
for (int j = 0; j < i; j++)
{
set_site(2, turn_x1, turn_y1, 50);
wait_all_reach();
set_site(2, turn_x0, turn_y0, 50);
wait_all_reach();
}
set_site(2, x_tmp, y_tmp, z_tmp);
wait_all_reach();
move_speed = 1;
body_left(15);
}
else
{
body_left(15);
x_tmp = site_now[0][0];
y_tmp = site_now[0][1];
z_tmp = site_now[0][2];
move_speed = body_move_speed;
for (int j = 0; j < i; j++)
{
set_site(0, turn_x1, turn_y1, 50);
wait_all_reach();
set_site(0, turn_x0, turn_y0, 50);
wait_all_reach();
}
set_site(0, x_tmp, y_tmp, z_tmp);
wait_all_reach();
move_speed = 1;
body_right(15);
}
}
//招手
void hand_shake(int i)
{
float x_tmp;
float y_tmp;
float z_tmp;
move_speed = 1;
if (site_now[3][1] == y_start)
{
body_right(15);
x_tmp = site_now[2][0];
y_tmp = site_now[2][1];
z_tmp = site_now[2][2];
move_speed = body_move_speed;
for (int j = 0; j < i; j++)
{
set_site(2, x_default - 30, y_start + 2 * y_step, 55);
wait_all_reach();
set_site(2, x_default - 30, y_start + 2 * y_step, 10);
wait_all_reach();
}
set_site(2, x_tmp, y_tmp, z_tmp);
wait_all_reach();
move_speed = 1;
body_left(15);
}
else
{
body_left(15);
x_tmp = site_now[0][0];
y_tmp = site_now[0][1];
z_tmp = site_now[0][2];
move_speed = body_move_speed;
for (int j = 0; j < i; j++)
{
set_site(0, x_default - 30, y_start + 2 * y_step, 55);
wait_all_reach();
set_site(0, x_default - 30, y_start + 2 * y_step, 10);
wait_all_reach();
}
set_site(0, x_tmp, y_tmp, z_tmp);
wait_all_reach();
move_speed = 1;
body_right(15);
}
}
/*
- 舵机服务/定时器中断功能/50Hz
- 当设置site expected时,这个函数会移动到目标直线
- 在设置expect之前,应该设置temp_speed[4][3],确保
直线移动,决定移动速度。
---------------------------------------------------------------------------*/
void servo_service(void)
{
sei();
static float alpha, beta, gamma;
for (int i = 0; i < 4; i++)
{
for (int j = 0; j < 3; j++)
{
if (abs(site_now[i][j] - site_expect[i][j]) >= abs(temp_speed[i][j]))
site_now[i][j] += temp_speed[i][j];
else
site_now[i][j] = site_expect[i][j];
}
cartesian_to_polar(alpha, beta, gamma, site_now[i][0], site_now[i][1], site_now[i][2]);
polar_to_servo(i, alpha, beta, gamma);
}
rest_counter++;
}
void set_site(int leg, float x, float y, float z) //设置某一条腿的最终坐标
{
float length_x = 0, length_y = 0, length_z = 0; //初始化float类型变量length_x,length_y,length_z
if (x != KEEP) //假若x轴不是保持状态
length_x = x - site_now[leg][0]; //计算x轴长度
if (y != KEEP) //假若y轴不是保持状态
length_y = y - site_now[leg][1]; //计算y轴长度
if (z != KEEP) //假若z轴不是保持状态
length_z = z - site_now[leg][2]; //计算z轴长度
float length = sqrt(pow(length_x, 2) + pow(length_y, 2) + pow(length_z, 2)); //计算宗长度
temp_speed[leg][0] = length_x / length * move_speed * speed_multiple; //计算对应腿的舵机1移动速度
temp_speed[leg][1] = length_y / length * move_speed * speed_multiple; //计算对应腿的舵机2移动速度
temp_speed[leg][2] = length_z / length * move_speed * speed_multiple; //计算对应腿的舵机3移动速度
if (x != KEEP) //假若x轴不是保持状态,则设置目标角度
site_expect[leg][0] = x;
if (y != KEEP) //假若y轴不是保持状态,则设置目标角度
site_expect[leg][1] = y;
if (z != KEEP) //假若z轴不是保持状态,则设置目标角度
site_expect[leg][2] = z;
}
/*单条腿部动作完成度检测
-----------------------------------------------------------------------*/
void wait_reach(int leg) //等待某条腿动作完成函数
{
while (1) //死循环
if (site_now[leg][0] == site_expect[leg][0]) //等待目标腿的 舵机 1达到目标角度
if (site_now[leg][1] == site_expect[leg][1])//等待目标腿的 舵机 2达到目标角度
if (site_now[leg][2] == site_expect[leg][2])//等待目标腿的 舵机 3达到目标角度
break; //跳出循环
}
/*四条动作完成度检测
-----------------------------------------------------------------------*/
void wait_all_reach(void) //等待全部腿动作完成函数
{
for (int i = 0; i < 4; i++) //依次等待4条腿动作完成
wait_reach(i);
}
/*
- 从笛卡尔坐标系到极坐标转化
- 数学模型2/2
---------------------------------------------------------------------------*/
void cartesian_to_polar(volatile float &alpha, volatile float &beta, volatile float &gamma, volatile float x, volatile float y, volatile float z)
{
//calculate w-z degree
float v, w;
w = (x >= 0 ? 1 : -1) * (sqrt(pow(x, 2) + pow(y, 2)));
v = w - length_c;
alpha = atan2(z, v) + acos((pow(length_a, 2) - pow(length_b, 2) + pow(v, 2) + pow(z, 2)) / 2 / length_a / sqrt(pow(v, 2) + pow(z, 2)));
beta = acos((pow(length_a, 2) + pow(length_b, 2) - pow(v, 2) - pow(z, 2)) / 2 / length_a / length_b);
//calculate x-y-z degree
gamma = (w >= 0) ? atan2(y, x) : atan2(-y, -x);
//trans degree pi->180
alpha = alpha / pi * 180;
beta = beta / pi * 180;
gamma = gamma / pi * 180;
}
/*
- 用对应的极坐标控制舵机
- 数学模型与事实相吻合的情况下
- EEprom中存储的错误将被添加
---------------------------------------------------------------------------*/
void polar_to_servo(int leg, float alpha, float beta, float gamma)
{
if (leg == 0)
{
alpha = 90 - alpha;
beta = beta;
gamma += 90;
}
else if (leg == 1)
{
alpha += 90;
beta = 180 - beta;
gamma = 90 - gamma;
}
else if (leg == 2)
{
alpha += 90;
beta = 180 - beta;
gamma = 90 - gamma;
}
else if (leg == 3)
{
alpha = 90 - alpha;
beta = beta;
gamma += 90;
}
//Serial.println(alpha);
//Serial.println(beta);
//Serial.println(gamma);
servo[leg][0].write(alpha); //设定对应腿上的舵机1旋转角度
servo[leg][1].write(beta); //设定对应腿上的舵机2旋转角度
servo[leg][2].write(gamma); //设定舵机3旋转角度
}