开源一个四足机器人
一、前言
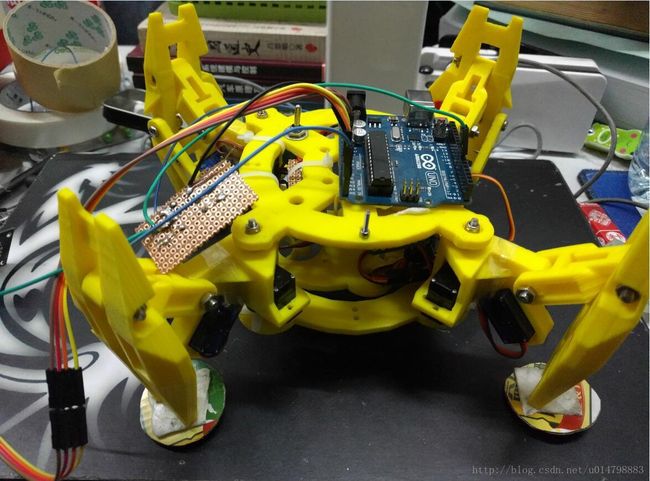
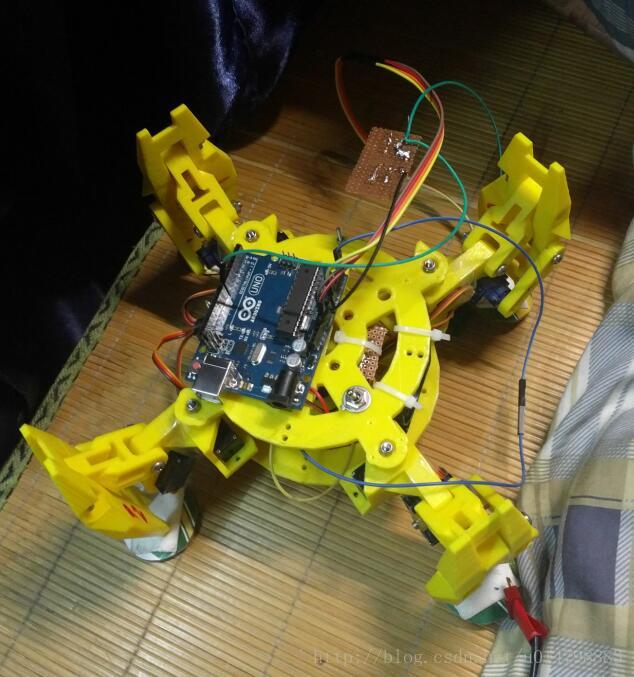
玩过很长一段时间单片机,一直想接触Arduino系列板子,这次如愿以偿。用去年自己3D打印机打的机器人外壳,Arduino UNO R3+舵机控制板,做的一个四足机器人。
二、爬过的坑
不得不承认Arduino确是个好东西,开发速度极快,极易上手。从开始动手到完成,只持续了3天不到,测试。调代码。封装。
整个过程里一开始就感觉会头疼的就是机器人的步态,因为之前也没接触过。实际操作起来比想象中容易的多。现在的机器人支持前进、后退、左转、右转、起立、坐下。五种步态。通过摇杆控制。
废话不多说,贴一下代码。
代码经过粗略的封装,舵机控制板有个库文件需要下载调用,别的都是手打的代码
主要封装了单足控制函数action.参数说明:foot:第N只足,Up:足举起的高度,Dis:足向前转动的角度幅度,walk:取0或1,0代表原地运动,1代表走动。主要是为了区别出起立坐下这两个原地运动。
再把action函数封装进前进、后退、左转、右转四个函数中,参数仅有t,用于设定动作间的延时,以控制整体的运动速度。
void action(int foot,int Up,int Dis,int walk=0){
switch (foot){
case 0 : hor = 0 ; ver = 4 ; verBegin=340;
break ;
case 1 : hor = 1 ; ver = 5 ; Up=-Up;verBegin=400;
Dis=-Dis;
break ;
case 2 : hor = 2 ; ver = 6 ; verBegin=340;
Dis=-Dis;
break ;
case 3 : hor = 3 ; ver = 7 ; Up=-Up;verBegin=400;
break ;
}
pwm.setPWM(ver, 0, verBegin + Up);
pwm.setPWM(hor, 0, SERVOBEGIN_0 + Dis);
delay(150);
if(walk){
pwm.setPWM(ver, 0, verBegin);
}
}
#include 三、步态说明
**如代码所见,四足的前进步态,(左前为1,右前为2,右后为3,左后为4)1,延时,3,小延时,1、3回正且迈出2,延时,4,小延时,2、4回正且迈出1…如此循环。后退步态无异。
左转步态也相似,主要都是一组交叉足先移动,再移动另一组交叉足。
期间试过四五种起始步态,有四足平行,“共”字的起始步态,晃动得很严重,猜测是因为机身较轻,且足底不平(贴了橡皮擦的切片增加摩擦力),还有就是“X”型起始步态,也不理想,最后还是确认了前两足“一”字,后两足八字。其实就是前两足用“工”,后两足用“X”。稳定性表现得最好。
当然还可以有更好的步态,机械结构上也有待改进。本人在此就暂时不深究了。**
四、配件list
1、3D打印的机器人外壳一套
2、Arduino UNO一块,Arduino摇杆模块一枚
3、16路PMW控制板一块
4、12V2A电源一枚
5、7805稳压芯片2枚,2枚散热片(用来并联,因为8个舵机同时工作+主板大约1.5A+的电流),或者别的2A输出的5V稳压芯片
6、小散热风扇,用来冷却7805的散热片
7、9g舵机8个
8、螺丝螺母:
M3*16螺丝4枚,M3防滑螺母4枚
M4*16螺丝4,
M4*25螺丝4,
M4*20螺丝4,M4防滑螺母4,M4螺母8
M3、M4尼龙垫片若干
五、视频动图
转身
前进
六、后续
这个机器人现阶段是为了调试运动性能,算合格了,后面会加入语音识别模块、语言播放模块、传感机械手、wifi模块、打造成一个只能语音控制的机器人。比如直接对话查机票价格、天气等等,以及一些特殊提醒。当然实用性不重要,够酷够炫才是关键。