KD树在knn算法中的应用
李航博士的书只讲了求得最近邻的一个样本点的检测,但我们实际中要的是k个近邻点。
我的一些猜测是在进行距离比较时,比如k=3,需要同时保存3个最近的距离,那我们可以以当前最近邻点的三个点与目的点的距离为半径,以目的点为圆心,看在这3个半径中,是否有新的样本点落在其中,如果有一个半径中包含新的样本点,KD树就需要转到那个分支上进行检测。
lire图片搜索引擎中的实现,用bow(词袋)机制对图片特征向量进行分类。先是用k-means做聚类,然后用KNN的算法进行分类,但不知其实现是否是用kd树进行搜索。有资料证明,当维数过高时,kd树检测效率并不好,计算量过大,像SIFT的128维特征是不行的。一般可以选用它的优化算法如BFF。kvm是一种更好的分类器选择。
现在粗略,说一下sift匹配的过程.
假如有两张图片img1,img2
1.对img2构建kd树,
2,对img1的每一个128维特征点,在kd树中找k=2的最近两点p1,p2,
3,distance(1)/distance(2)<=设定阈值,匹配成功,否则失败,没有匹配点
4,用ransac进行错误匹配排除,得到正确匹配。
如果是对于lire这种大型图片搜索引擎,依据匹配率(匹配数/特征点数)进行排队,得出最相似的几张图片。
并且可以在录入图片时(对图片集建立索引时),对每一张图片建立kd树,以加快后面可能的检索过程。
以下为在网上找到的一篇文章,讲kd树的基本内容。http://www.dataguru.cn/article-4722-1.html
Kd-树概念
Kd-树 其实是K-dimension tree的缩写,是对数据点在k维空间中划分的一种数据结构。其实,Kd-树是一种平衡二叉树。
举一示例:
假设有六个二维数据点 = {(2,3),(5,4),(9,6),(4,7),(8,1),(7,2)},数据点位于二维空间中。为了能有效的找到最近邻,Kd-树采用分而治之的思想,即将整个空间划分为几个小部分。六个二维数据点生成的Kd-树的图为: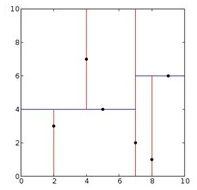
2D 对应的kd的平面划分 3D 对应的kd的平面划分
k-d树算法可以分为两大部分,一部分是有关k-d树本身这种数据结构建立的算法,另一部分是在建立的k-d树上如何进行最邻近查找的算法。
一 Kd-树的构建
Kd-树是一个二叉树,每个节点表示的是一个空间范围。下表表示的是Kd-树中每个节点中主要包含的数据结构。
Range域表示的是节点包含的空间范围。
Node-data域就是数据集中的某一个n维数据点。分割超面是通过数据点Node-Data并垂直于轴split的平面,分割超面将整个空间分割成两个子空间。
令split域的值为i,如果空间Range中某个数据点的第i维数据小于Node-Data[i],那么,它就属于该节点空间的左子空间,否则就属于右子空间。
Left,Right域分别表示由左子空间和右子空间空的数据点构成的Kd-树。
|
域名
|
数据类型
|
描述
|
|
Node-data
|
数据矢量
|
数据集中某个数据点,是n维矢量(这里也就是k维)
|
|
Range
|
空间矢量
|
该节点所代表的空间范围
|
|
split
|
整数
|
垂直于分割超平面的方向轴序号
|
|
Left
|
k-d树
|
由位于该节点分割超平面左子空间内所有数据点所构成的k-d树
|
|
Right
|
k-d树
|
由位于该节点分割超平面右子空间内所有数据点所构成的k-d树
|
|
parent
|
k-d树
|
父节点
|
构建k-d树的算法实现
算法:构建k-d树(createKDTree)
输入:数据点集Data-set和其所在的空间Range
输出:Kd,类型为k-d tree
1、If Data-set为空,则返回空的k-d tree
2、调用节点生成程序:
(1)确定split域:对于所有描述子数据(特征矢量),统计它们在每个维上的数据方差。以SURF特征为例,描述子为64维,可计算64个方差。挑选出最大值,对应的维就是split域的值。数据方差大表明沿该坐标轴方向上的数据分散得比较开,在这个方向上进行数据分割有较好的分辨率;
(2)确定Node-data域:数据点集Data-set按其第split域的值排序。位于正中间的那个数据点被选为Node-data。此时新的Data-set' = Data-set\Node-data(除去其中Node-data这一点)。
3、dataleft = {d属于Data-set' && d[split] ≤ Node-data[split]}
Left_Range = {Range && dataleft} dataright = {d属于Data-set' && d[split] > Node-data[split]}
Right_Range = {Range && dataright}
4.、eft = 由(dataleft,Left_Range)建立的k-d tree,即递归调用createKDTree(dataleft,Left_
Range)。并设置left的parent域为Kd;
right = 由(dataright,Right_Range)建立的k-d tree,即调用createKDTree(dataright,Right_
Range)。并设置right的parent域为Kd。
构建k-d树算法举例
从上述举的实例来看,过程如下:
(1)确定:split 域=x,6个数据点在x,y 维度上的数据方差为39,28.63.在x轴方向上的方差大,所以split域值为x。
(2)确定:Node-Data=(7,2),根据x维上的值将数据排序,6个数据的中值为7,所以node-data域为数据点(7,2)。这样该节点的分割超面就是通过(7,2)并垂直于:split=x轴的直线x=7.
(3) 确定:左子空间和右子空间,分割超面x=7将整个空间分为两部分。x<=7 为左子空间,包含节点(2,3),(5,4),(4,7),另一部分为右子空间。包含节点(9,6),(8,1)
这个构建过程是一个递归过程。重复上述过程,直至只包含一个节点。
如算法所述,k-d树的构建是一个递归的过程。然后对左子空间和右子空间内的数据重复根节点的过程就可以得到下一级子节点(5,4)和(9,6)(也就是左右子空间的'根'节点),同时将空间和数据集进一步细分。如此反复直到空间中只包含一个数据点,如图1所示。最后生成的k-d树如图2所示。
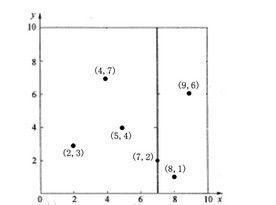
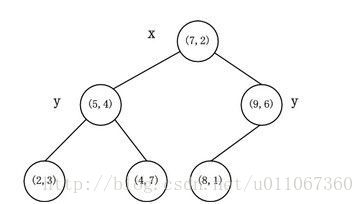
图1 图2
二、构建完kd树之后,如今进行最近邻搜索呢?
KD树的查找算法:
在k-d树中进行数据的查找也是特征匹配的重要环节,其目的是检索在k-d树中与查询点距离最近的数据点。
这里先以一个简单的实例来描述最邻近查找的基本思路。
例一:查询的点(2.1,3.1)(较简单)。
1、如图3所示,星号表示要查询的点(2.1,3.1)。通过二叉搜索,顺着搜索路径很快就能找到最邻近的近似点,也就是叶子节点(2,3)。
2、而找到的叶子节点并不一定就是最邻近的,最邻近肯定距离查询点更近,应该位于以查询点为圆心且通过叶子节点的圆域内。
3、为了找到真正的最近邻,还需要进行'回溯'操作:
算法沿搜索路径反向查找是否有距离查询点更近的数据点。
此例中先从(7,2)点开始进行二叉查找,然后到达(5,4),最后到达(2,3),此时搜索路径中的节点为<(7,2),(5,4),(2,3)>,
首先以(2,3)作为当前最近邻点,计算其到查询点(2.1,3.1)的距离为0.1414,
然后回溯到其父节点(5,4),并判断在该父节点的其他子节点空间中是否有距离查询点更近的数据点。以(2.1,3.1)为圆心,以0.1414为半径画圆,如图3所示。发现该圆并不和超平面y = 4交割,因此不用进入(5,4)节点右子空间中去搜索。
4、最后,再回溯到(7,2),以(2.1,3.1)为圆心,以0.1414为半径的圆更不会与x = 7超平面交割,因此不用进入(7,2)右子空间进行查找。至此,搜索路径中的节点已经全部回溯完,结束整个搜索,返回最近邻点(2,3),最近距离为0.1414。
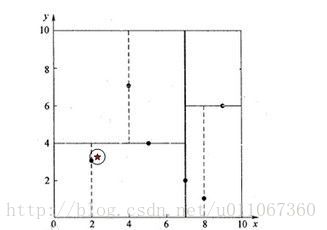
图3
例二:查找点为(2,4.5)(叫复杂一点)。
一个复杂点了例子如查找点为(2,4.5)。
1、同样先进行二叉查找,先从(7,2)查找到(5,4)节点,在进行查找时是由y = 4为分割超平面的,由于查找点为y值为4.5,因此进入右子空间查找到(4,7),形成搜索路径<(7,2),(5,4),(4,7)>,
2、取(4,7)为当前最近邻点,计算其与目标查找点的距离为3.202。然后回溯到(5,4),计算其与查找点之间的距离为3.041。
((4,7)与目标查找点的距离为3.202,而(5,4)与查找点之间的距离为3.041,所以(5,4)为查询点的最近点;)
3、以(2,4.5)为圆心,以3.041为半径作圆,如图4所示。可见该圆和y = 4超平面交割,所以需要进入(5,4)左子空间进行查找。此时需将(2,3)节点加入搜索路径中得<(7,2),(2,3)>。
4、回溯至(2,3)叶子节点,(2,3)距离(2,4.5)比(5,4)要近,所以最近邻点更新为(2,3),最近距离更新为1.5。
5、回溯至(7,2),以(2,4.5)为圆心1.5为半径作圆,并不和x = 7分割超平面交割,如图5所示。
至此,搜索路径回溯完。返回最近邻点(2,3),最近距离1.5。

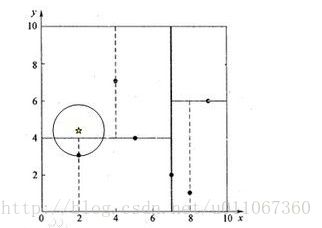
图4 图5
k-d树查询算法的简要说明: