【cpg控制】HOPF振荡器动态特性分析
动态特性
- 零、概述
- 一、HOPF振荡器
- 二、动态特性
- 1、 α \alpha α值
- 2、 μ \mu μ值
- 3、 ω \omega ω值
零、概述
众所周知,动物最常见的运动方式是节律运动,即按照一定的节奏、有力度地重复、协调、持续进行的动作,是低级神经中枢的自激行为。生物学上,动物的节律运动控制区被认为是分层并且模块化的,其控制以中枢模式发生器为中心,既可以接受来自高层的高级神经中枢的主观控制,也可以响应来自躯体各种感受器官的反射,这就是CPG控制机理。
前人已经按照CPG控制机理建立了不同形式的数学模型,它们能够产生的周期振荡的信号,使其能够满足节律运动的特点。
CPG模型分类
目前比较经典的CPG模型可划分为以下两大类:
-
①基于神经元的模型:Matsuoka神经元震荡模型、Kimura模型等,该类模型生物学意义明确,但参数较多,动态特性分析比较复杂。
-
②基于非线性振荡器的模型:Kuramoto相位振荡器、Hopf谐波振荡器等,该类模型参数较少,模型比较成熟。
在保证能够输出稳定的周期性震荡信号的前提下,那些形式简单、参数较少、计算量小、便于分析、易于实现的CPG模型是更好的选择。根据这一个原则,我们选取了HOPF振荡器作为CPG控制的核心。
一、HOPF振荡器
HOPF振荡器在状态空间中存在一个稳定的极限环,即对于任意非零初始值,均能使得振荡器产生相同形状的周期性振荡信号,其数学模型如下:
d x d t = α ( μ − r 2 ) x − ω y \frac{dx}{dt} = \alpha(\mu - r^2)x - \omega y dtdx=α(μ−r2)x−ωy
d y d t = α ( μ − r 2 ) y + ω x \frac {dy}{dt} = \alpha(\mu-r^2)y+\omega x dtdy=α(μ−r2)y+ωx
其中 α , μ , ω \alpha,\mu, \omega α,μ,ω为模型参数,用于调整振荡器的动态特性,稍后会给大家演示。现在取 α = 100 , μ = 1 , ω = 2 π \alpha=100, \mu=1, \omega=2\pi α=100,μ=1,ω=2π,我们看下振荡器的输出情况。
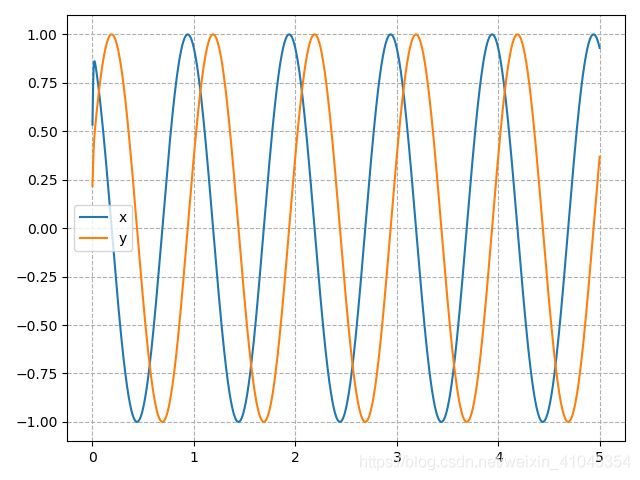
对于给定初始值为[1, 0],按时间输出,我们能得到以上效果,按x,y输出,我们得到的是一个圆,所以hopf振荡器的输出信号本质上,我们可以看做是一个圆上的点随时间沿圆周运动,
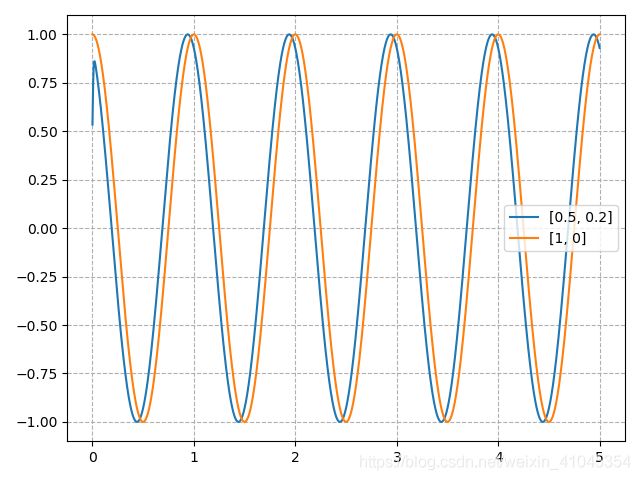
我们尝试一下将初始值点定在圆周外任一点,如[0.5, 0.2],看下效果:
对比初始值在圆上的曲线,我们可以发现,对于不同初始值的,在稳态输出后仍能收敛到圆上,得到相同波形。这也是我们选择HOPF振荡器作为该四足机器人cpg控制核心的一个重要原因之一。
注意:这里只画出了x值的曲线
二、动态特性
上文已经提到,hopf振荡器有以下参数 α , μ , ω \alpha,\mu, \omega α,μ,ω,这些参数到底约束了什么,我们一个一个来看。
1、 α \alpha α值
该值是用来表征振荡器收敛到圆环上的速度的,我们试着对比不同取值,看波形有什么变化,其余参数均保持一致,取 μ = 1 , ω = 2 π \mu=1, \omega=2\pi μ=1,ω=2π。初始值设置为[0.5,0]
①分别设置参数 α = 10 \alpha=10 α=10 , α = 100 \alpha=100 α=100, α = 1000 \alpha=1000 α=1000:

可以看出, α \alpha α值越大时,hopf振荡器越快得到稳定的波形。当该值比较小时,振荡器需要经过很长一段时间才能得到稳态输出,而当其很大时,虽然能够迅速得到稳定的输出,但在收敛阶段产生的信号会非常尖锐,甚至会超过规定的幅值,实际使用中可能会对执行器造成一定损害,所以我们应该根据执行器的特性选取适当的 α \alpha α值。
2、 μ \mu μ值
该值是用来表征信号幅值的,即圆环半径。分别取 μ = 0.1 , 0.5 , 2 \mu=0.1, 0.5,2 μ=0.1,0.5,2,以 μ = 1 \mu=1 μ=1为基准进行比较,其余参数均保持一致,分别为 α = 100 , ω = 2 π \alpha=100, \omega=2\pi α=100,ω=2π, 初始值为[1, 0]
① 设置 μ = 0.25 \mu=0.25 μ=0.25时:

② 设置 μ = 4 \mu=4 μ=4:
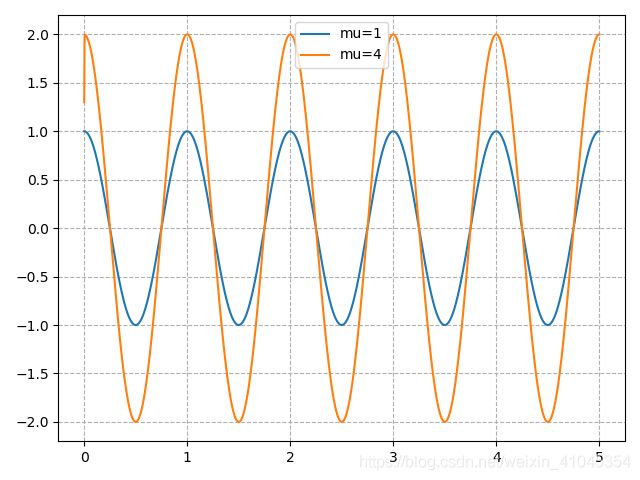
有小伙伴可能会奇怪,为什么要取0.25和4这种相对比较特殊的值,我们通过图像不难发现, μ = 0.25 \mu=0.25 μ=0.25时,幅值为0.5。 μ = 4 \mu=4 μ=4时,幅值为2,这实际上是一个开方的关系。即幅值 A = μ A=\sqrt{\mu} A=μ
3、 ω \omega ω值
该值用来表征周期,计算公式为 T = 2 π ω T = \frac{2\pi}{\omega} T=ω2π,同理,我们设置不同取值( ω = π \omega=\pi ω=π,及 ω = 2 π \omega=2\pi ω=2π),看图像有何区别
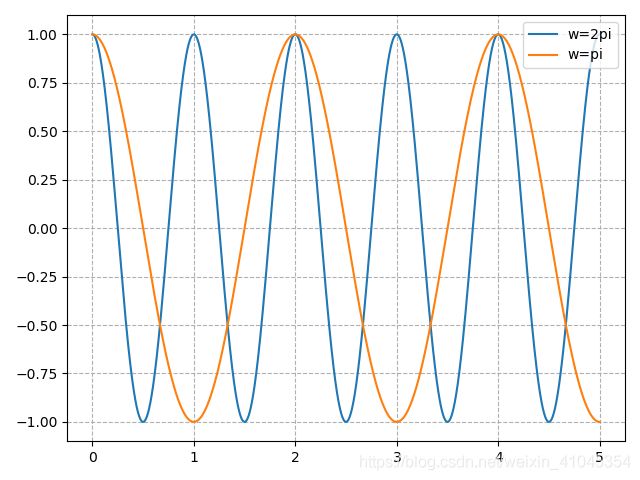
通过控制周期,可以改变信号变化的速度,话句话说,就是我们可以通过 ω \omega ω值来控制机器人的前进速度
