手机相机驱动的clk等参数说明
概述
此文档以imx582为样例说明
MTK相机驱动代码中的参数:
.pre = {
.pclk = 864000000,
.linelength = 7872,
.framelength = 3622,
.startx = 0,
.starty = 0,
.grabwindow_width = 4000,
.grabwindow_height = 3000,
.mipi_data_lp2hs_settle_dc = 85,
.mipi_pixel_rate = 590400000,
.max_framerate = 300,
},
.mclk = 24,
.mipi_lane_num = SENSOR_MIPI_4_LANE,
参数说明
Frame Rate[frame/s] = Pixel Rate[pixels/s] / (Frame Length[lines/frame] * Line Length[pixels/line])
Pixel Rate[pixels/s] = IVTPXCK[MHz] * 4(Channel Number(Lane))
参数和代码对应说明:
Pixel Rate = pclk
Frame Rate = max_framerate
Channel Number = mipi_lane_num
PLL是调整内部分频方式
PLL寄存器说明


kal_uint16 register_setting[] = {
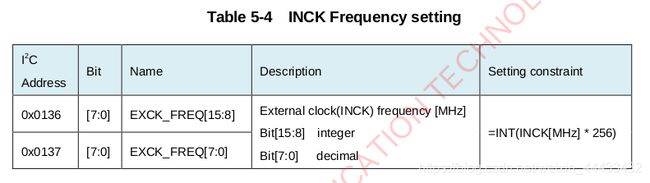
0x0136, 0x18, //mclk = 24
0x0137, 0x00,
0x0342, 0x1E, //linelength = 7872
0x0343, 0xC0,
0x0340, 0x0E, //framelength = 3622
0x0341, 0x26,
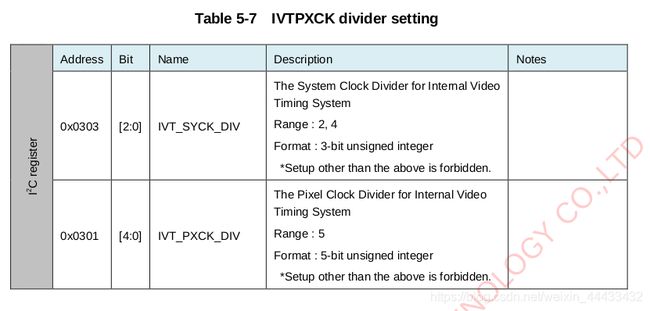
0x0301, 0x05, //IVT_PXCK_DIV = 5
0x0303, 0x02, //IVT_SYCK_DIV = 2
0x0305, 0x04, //IVT_PREPLLCK_DIV = 4
0x0306, 0x01, //IVT_PLL_MPY = 360
0x0307, 0x68,
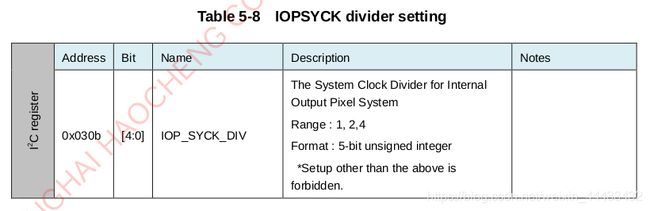
0x030B, 0x01, //IOP_SYCK_DIV = 1
0x030D, 0x06, //IOP_PREPLLCK_DIV = 6
0x030E, 0x01, //IOP_PLL_MPY = 369
0x030F, 0x71,
0x0310, 0x01, //Dual PLL mode
0x040C, 0x0F, //grabwindow_width = 4000
0x040D, 0xA0,
0x040E, 0x0B, //grabwindow_height = 3000
0x040F, 0xB8,
}
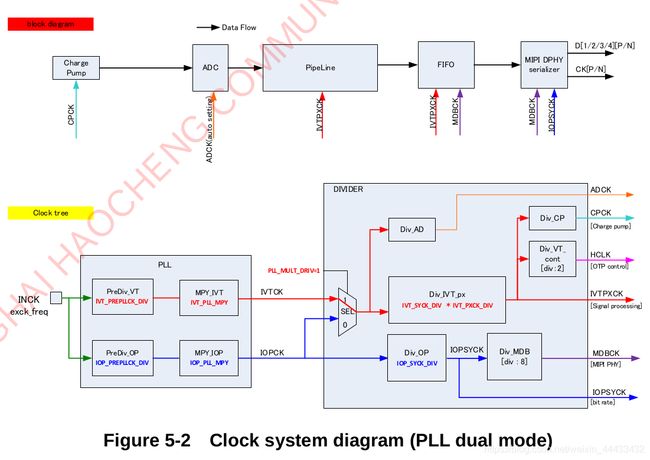
PLL Single Mode:
IOPCK = INCK frequency * Pre Divider setting * PLL multiple setting
Pre Divider setting = 1 / IVT_PREPLLCK_DIV
PLL multiple setting = IVT_PLL_MPY
IVTCK = IOPCK
上面register_setting中的参数带入后计算的结果如下:
IVTCK = 24 / 4 * 360 = 2160[MHz]
IVTPXCK = IVTCK / IVT_PXCK_DIV / IVT_SYCK_DIV = 2160 / 5 / 2 = 216[MHz]
Pixel Rate[pixels/s] = IVTPXCK[MHz] * 4(Channel Number(Lane))
pclk = 216 * 4 = 864[MHz] (pclk = 864000000)
mipi_pixel_rate = IOPCK / 10(RAW10) * 4(Channel Number(Lane)) = 2160 / 10 * 4 = 864[MHz]
PLL Dual Mode:
IVTCK = INCK frequency * Pre Divider setting * PLL multiple setting
Pre Divider setting = 1 / IVT_PREPLLCK_DIV
PLL multiple setting = IVT_PLL_MPY
IOPCK = INCK frequency * Pre Divider setting * PLL multiple setting
Pre Divider setting = 1 / IOP_PREPLLCK_DIV
PLL multiple setting = IOP_PLL_MPY
上面register_setting中的参数带入后计算的结果如下:
IVTCK = 24 / 4 * 360 = 2160[MHz]
IOPCK = 24 / 6 * 369 = 1476[MHz]
IVTPXCK = IVTCK / IVT_PXCK_DIV / IVT_SYCK_DIV = 2160 / 5 / 2 = 216[MHz]
Pixel Rate[pixels/s] = IVTPXCK[MHz] * 4(Channel Number(Lane))
pclk = 216 * 4 = 864[MHz] (pclk = 864000000)
mipi_pixel_rate = IOPCK / 10(RAW10) * 4(Channel Number(Lane)) = 1476 / 10 * 4 = 590.4[MHz] (mipi_pixel_rate = 590400000)
因为是Dual PLL mode(0x0310, 0x01),所以 mipi_pixel_rate = 590400000