ROS实践手册(二)ROS命令行工具
笔者根据 古月居 · ROS入门21讲 学习整理,并参考《ROS机器人开发实践》一书。
【注】该部分可参考 古月居 · ROS入门21讲 第8讲
实验准备:启动小海龟仿真器
- 使用
$ roscore启动 Ros Master - 打开一个新的终端,启动小海龟仿真器:
$ rosrun turtlesim turtlesim_node - 打开一个新的终端,启动小海龟控制节点:
$ rosrun turtlesim turtle_teleop_key
工具使用
$ rqt_graph:计算图可视化界面$ rosnode:节点工具$ rosnode ping node_name:测试连接某节点$ rosnode list:列出当前所有的节点$ rosnode info node_name:查看某节点信息$ rosnode machine machine_name:列出在特定机器或列表机器上运行的节点$ rosnode kill node_name:杀死某节点$ rosnode cleanup:清除不可到达节点的注册信息$ rosnode help:查看帮助信息
$ rostopic:话题工具$ rostopic bw topic_name:查看某个topic的带宽$ rostopic delay topic_name:在标题中通过时间戳显示话题延迟$ rostopic echo topic_name:显示某个topic的内容$ rostopic find topic_type:查找某个类型的topic$ rostopic hz topic_name:查看某个topic的频率$ rostopic info topic_name:显示某个topic的属性信息$ rostopic list:列出当前所有的topic$ rostopic pub topic_name:向某个topic发布内容- 输入话题名后,双击TAB键补全默认结构,包括该topic的数据结构和具体数据
- 例如,输入
$ rostopic pub /turtle1/cmd_vel后双击TAB键,补全的信息分别为Twist数据结构中的线速度linear和角速度angular,单位分别为米和弧度。 -r rate_number设置发布topic的频率,例如,输入$ rostopic pub -r 10 /turtle1/cmd_vel后双击TAB键补全信息,表示每秒钟发布10次该topic。
$ rostopic type topic_name:查看某个topic的类型(msg)
$ rosmsg:消息工具$ rosmsg show message_name:查看某个消息的数据结构$ rosmsg info message_name:同上,show的别名。$ rosmsg list:列出当前所有的消息$ rosmsg md5 package_name: _ 未知 _$ rosmsg package package_name:列出某个包中的所有消息$ rosmsg packages message_name:列出包含该消息的所有包
$ rosservice:服务工具$ rosservice args:查看某个服务的参数结构$ rosservice call sevice_name:请求某个服务- 输入服务名后,双击TAB键补全默认结构
- 例如,请求生成新小海龟的服务,输入
$ rosservice call /spawn后双击TAB键,补全的信息分别为新小海龟的x,y坐标,theta角度朝向,name名称。
$ rosservice find service_type:按照服务类型查找服务$ rosservice info sevice_name:查看某个服务的详细信息$ rosservice list:列出当前所有可请求的服务$ rosservice type sevice_name:查看某个服务的类型$ rosservice uri sevice_name:查看某个服务rosrpc所在的主机及端口
$ rosbag:话题记录工具$ rosbag check:判断一个bag文件在当前系统是否可执行,可移动$ rosbag compress:压缩一个或多个bag文件$ rosbag decompress:解压一个或多个bag文件$ rosbag decrypt:解密一个或多个bag文件$ rosbag encrypt:加密一个或多个bag文件$ rosbag filter:过滤bag中的内容$ rosbag fix:修复bag文件使其在当前系统可执行$ rosbag help:查看帮助信息$ rosbag info:总览一个或多个bag文件的内容$ rosbag play:以时间同步的方式回放一个或多个包文件的内容$ rosbag record:用指定主题的内容记录一个bag文件$ rosbag reindex:重新索引一个或多个bag文件- 常用指令
- 话题记录:
$ rosbag record -a -O record_file_name - 话题复现:
$ rosbag play record_file_name.bag
- 话题记录:
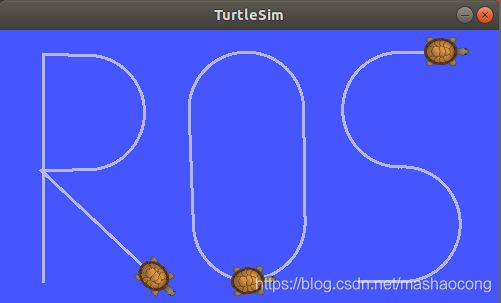
实践练习
- 启动ROS仿真器
$ roscore: 启动 Ros Master$ rosrun turtlesim turtlesim_node:启动小海龟仿真器
- 控制指令
- turtle1 绘制 “O”
$ rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.5708]':向左90°弧$ rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist '[2.5, 0.0, 0.0]' '[0.0, 0.0, 0.0]':前行2.5$ rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist '[4.0, 0.0, 0.0]' '[0.0, 0.0, 3.1416]':向左180°弧$ rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist '[2.5, 0.0, 0.0]' '[0.0, 0.0, 0.0]':前行2.5$ rostopic pub -1 /turtle1/cmd_vel geometry_msgs/Twist '[2.0, 0.0, 0.0]' '[0.0, 0.0, 1.5708]':向左90°弧
- turtle2 绘制 “R”
$ rosservice call /spawn 1.0 5.5 1.5708 "turtle2":创建新乌龟turtle2,坐标为(1.0, 5.5),头朝向北$ rostopic pub -1 /turtle2/cmd_vel geometry_msgs/Twist '[5.0, 0.0, 0.0]' '[0.0, 0.0, 0.0]':前行5.0$ rostopic pub -1 /turtle2/cmd_vel geometry_msgs/Twist '[0.0, 0.0, 0.0]' '[0.0, 0.0, -1.5708]':原地右转90°$ rostopic pub -1 /turtle2/cmd_vel geometry_msgs/Twist '[1.0, 0.0, 0.0]' '[0.0, 0.0, 0.0]':前行1.0$ rostopic pub -1 /turtle2/cmd_vel geometry_msgs/Twist '[4.0, 0.0, 0.0]' '[0.0, 0.0, -3.1416]':向右180°弧$ rostopic pub -1 /turtle2/cmd_vel geometry_msgs/Twist '[1.0, 0.0, 0.0]' '[0.0, 0.0, 0.0]':前行1.0$ rostopic pub -1 /turtle2/cmd_vel geometry_msgs/Twist '[0.0, 0.0, 0.0]' '[0.0, 0.0, 2.3562]':原地左转135°$ rostopic pub -1 /turtle2/cmd_vel geometry_msgs/Twist '[3.5355, 0.0, 0.0]' '[0.0, 0.0, 0.0]':前行3.5355
- turtle3 绘制 “S”
$ rosservice call /spawn 8.0 5.5 0.0 "turtle3":创建新乌龟turtle3,坐标为(10.0, 5.5),头朝向东$ rostopic pub -1 /turtle3/cmd_vel geometry_msgs/Twist '[1.0, 0.0, 0.0]' '[0.0, 0.0, 0.0]':前行1.0$ rostopic pub -1 /turtle3/cmd_vel geometry_msgs/Twist '[4.0, 0.0, 0.0]' '[0.0, 0.0, 3.1416]':向左180°弧$ rostopic pub -1 /turtle3/cmd_vel geometry_msgs/Twist '[4.0, 0.0, 0.0]' '[0.0, 0.0, -3.1416]':向右180°弧$ rostopic pub -1 /turtle3/cmd_vel geometry_msgs/Twist '[1.0, 0.0, 0.0]' '[0.0, 0.0, 0.0]':前行1.0
- turtle1 绘制 “O”