Dijkstra算法中的A*改进
A*算法在Dijkstra算法中的应用
目录
1.参考资料
2.具体原理
2.1A*算法原理
2.1.1启发式搜索
2.1.2A*算法
2.2Dijkstra算法的改进
2.2.1松弛技术
2.2.2改进
3.改进结果
3.1改进目标
3.2运行结果
这是一个算法上机题对Dijkstra算法中松弛技术的改进,引入了启发式搜索,即A*算法的思想,学了一天了,现总结于此
1.参考资料
1.A*算法的一个具体实例讲解:
http://www.cppblog.com/christanxw/archive/2006/04/07/5126.html
2.启发式寻路算法总结(包含Dijkstra算法的讨论)
http://www.gaccob.com/publish/2015-05-28-path-finding.html#dijkstra?tdsourcetag=s_pcqq_aiomsg
3.A*算法中启发函数的使用
https://blog.csdn.net/free4wuyou/article/details/15676597
以上是关于A*和Dijkstra的具体讨论,其中
网址1比较具体也比较简单的介绍了A*算法的一个实例;
网址2则是提纲挈领,比较好的总结了多种启发式寻路算法,也给出了启发函数的明确定义;
网址3则是讲解了不同启发函数对算法性能的影响,并给出能得到最优解的条件——如果h(n)总是小于(或者等于)从结点n走到目标结点的步数,那么A*算法是一定可以找到最优路径的。
2.具体原理
2.1A*算法原理
2.1.1启发式搜索
盲目搜索会浪费很多时间和空间, 所以我们在路径搜索时, 会首先选择最有希望的节点, 这种搜索称之为 "启发式搜索 (Heuristic Search)"
如何来界定"最有希望"? 我们需要通过 启发函数 (Heuristic Function) 计算得到.
即在最短路径搜索时,当前点到目标点的一个估计函数(估计成本)。
常用的启发函数有:
- 曼哈顿距离(Manhattan distance)
- 切比雪夫距离(Chebyshev distance)
- 欧氏距离(Euclidean distance)
- Octile 距离
具体参照,网址2:
http://www.gaccob.com/publish/2015-05-28-path-finding.html#dijkstra?tdsourcetag=s_pcqq_aiomsg
下文中启发函数用h(n)表示,其意义为
h(n) 代表从当前点 n 到目标点 S 的估算开销, 即启发函数.
原来的从起点到当前点路径长度用g(n)表示,其意义为
g(n): 从起始点到当前点 n 的开销, 在网格地图中一般就是步长
2.1.2A*算法
A-Star 俗称 A , 是应用最广的寻路算法, 在很多场景下都适用. A 兼顾了 Dijkstra 的准确度和 BFS 的效率.
- f(n) = g(n) + h(n) , g(n) 和 h(n) 的定义同上
- 当 g(n) 退化为 0, 只计算 h(n) 时, A* 即退化为 BFS.
- 当 h(n) 退化为 0, 只计算 g(n) 时, A* 即退化为 Dijkstra 算法.
- 将起始点 S 加入 open-list.
- 从当前的 open-list 中选取 f(n) 最优(最小)的节点 n, 加入 close-list
- 遍历 n 的后继节点 ns
- 如果 ns 是新节点, 加入 open-list
- 如果 ns 已经在 open-list 中, 并且当前 f(ns) 更优, 则更新 ns 并修改 parent
- 迭代, 直到找打目标节点 D.
A 算法在从起始点到目标点的过程中, *尝试平衡 g(n) 和 h(n), 目的是找到最小(最优)的 f(n).
这里解释一下A*对Dijkstra改进的好处,在一张大地图中,此时的模型为欧氏平面,路径长即为欧氏距离,并且存在着三角形不等式
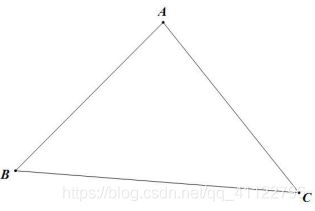
AB+AC>BC
由此知,在地图的最短路径的搜索中,并不是盲目搜索(Dijkstra是优先从当前最短路径的点搜索)效率最高,而是大致朝着终点方向搜索最快收敛,因为两点之间直线段最短,此时可以在Dijkstra算法中改变其松弛技术来做到这一点。
2.2Dijkstra算法的改进
2.2.1松弛技术
这里的松弛是指边的松弛和点的松弛,具体定义见算法书P418.这里简单说明
边的松弛。 松弛边v-> w意味着测试从s到w的最佳已知方式是从s到v,然后从v到w的边缘,如果是,则更新我们的数据结构。
顶点松弛。 我们所有的实现实际上都松弛了从给定顶点指向的所有边。
Dijkstra算法即是加点法,即从起点出发,遍历测试松弛起点邻接的每一个点,然后将最小的边加入最小生成树。
这里设起点s,边e(v,w),终点t,路径长度函数为d[v],即表示s到v的最短路径长。这里d其实就是上文的g。
则松弛边e为
If(d[w]>d[v]+e)
{
d[w]=d[v]+e;
将该边加入树;
}
但Dijkstra算法每次都是检查树中最短路径的点,这不一定是我们要的查找方向——大致朝着终点方向搜索。
2.2.2改进
此时采用启发式搜索,引入新的度量D[v](即f)代替d[v](即g),加入当前点到终点的欧氏距离
D[v]=d[v]+distance(v,t)
(f(n)=g(n)+h(n))
这里启发函数h(n)即为
h(v)=distance(v,t)
即顶点v到终点t的欧氏距离。
则松弛边e为
If(D[w]>D[v]-distance(v,t)+e(v,w)+distance(w,t))
{
D[w]=D[v]-distance(v,t)+e(v,w)+distance(w,t);
将该边加入树;
}
这里解释下为什么D[w]更新为如上式子,由D[w]定义
D[w]=d[w]+distance(w,t) 式1
又d[w]是s->w路径长,此时边e(v,w)的另一个端点为v,松弛该边,则应测试s->v+v->w的路径长,故把d[w]写为
d[w]=d[v]+e(v,w) 式2
此时式1变为
D[w]=d[v]+e(v,w)+distance(w,t) 式3
此时求d[v],由于此时只储存了新度量D,故从D[v]表达式入手
D[v]=d[v]+distance(v,t)
得d[v]
d[v]=D[v]-distance(v,t) 式4
将式(4)代入式(3)即得改进条件
D[w]=D[v]-distance(v,t)+e(v,w)+distance(w,t); 式5
式(5)即是Dijkstra算法的A*改进,或称启发式搜索改进。
此时搜索方向大致朝着终点方向搜索,并且由于三角形不等式,易证明该算法能够得到最优路径:
如果h(n)总是小于(或等于)从结点n走到目标结点的步数(这里三角形不等式提供保证),那么A*算法是一定可以找到最优路径的。
3.改进结果
3.1改进目标
目标2即为A*算法
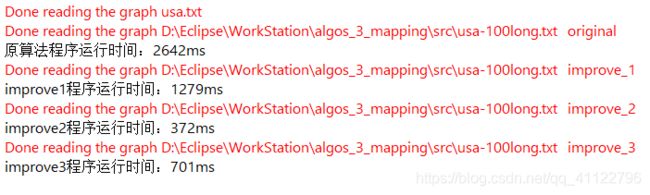
3.2运行结果
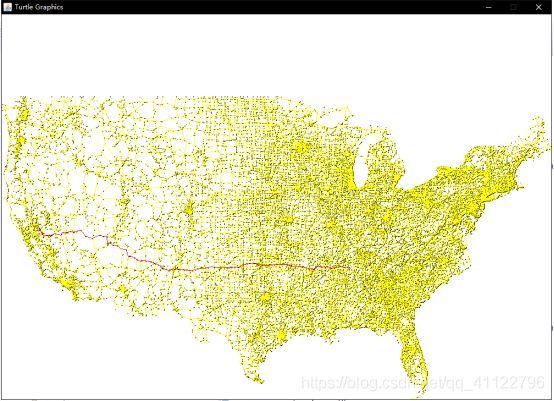
原算法,求0-5000的路径
改进1,到d就停止搜索

改进2,启发式搜索
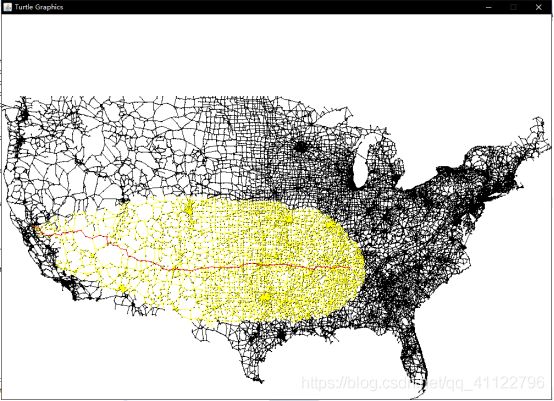
改进3,多路堆,我采用了8路堆

搜索100个查询性能比较