机器人驱动介绍(2)

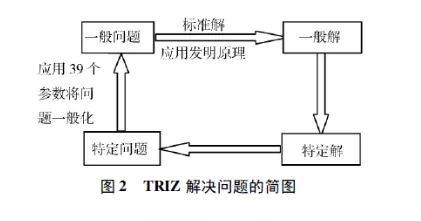
 根据亚太机器人大赛规则,要求机器人车轮与地面有较大的摩擦力,以保证机器人在规定的时间内完成比赛任务。文中以TRIZ为理论基础,应用CREAX Innovation Suite软件对驱动轮的摩擦问题进行了分析,根据CREAX提供的问题解决流程及相关的TRIZ创新原理进行驱动轮的方案设计,通过实验分析验证,最终得到了驱动轮的理想设计方案。 1.TRIZ简介 TRIZ(Theory of Inventive Problem Solving)是俄文中“发明问题解决理论”的词头。它是前苏联G S Altshulle和他的同事们及其领导的一批研究人员,自1946年开始,花费大量的人力和物力,在分析研究了世界上近250万件高水平发明专利,综合多个学科领域原理、法则的基础上提出的创新方法理论体系。 技术进化原理是发明问题解决理论的核心,而解决矛盾是技术系统进化的推动力。阿奇舒勒依据世界上著名的发明,研究了消除矛盾的方法并建立了一系列基于各学科基础知识的发明创造模型。这些模型包括发明原理(Inventive Principles)、发明问题解决算法(Algorithm for Inventive Problem Solving,ARIZ)及标准解(TRIZ Standard Techniques)等。在利用TRIZ解决问题的过程中,设计者首先将待设计的产品表达为TRIZ问题,然后利用TRIZ中的工具,如发明原理、标准解等,求出该TRIZ问题的普适解或称模拟解(Analogous solution),最后设计者再把该解转化为该领域的解或特解。图2表明了利用TRIZ进行问题求解的全过程。
根据亚太机器人大赛规则,要求机器人车轮与地面有较大的摩擦力,以保证机器人在规定的时间内完成比赛任务。文中以TRIZ为理论基础,应用CREAX Innovation Suite软件对驱动轮的摩擦问题进行了分析,根据CREAX提供的问题解决流程及相关的TRIZ创新原理进行驱动轮的方案设计,通过实验分析验证,最终得到了驱动轮的理想设计方案。 1.TRIZ简介 TRIZ(Theory of Inventive Problem Solving)是俄文中“发明问题解决理论”的词头。它是前苏联G S Altshulle和他的同事们及其领导的一批研究人员,自1946年开始,花费大量的人力和物力,在分析研究了世界上近250万件高水平发明专利,综合多个学科领域原理、法则的基础上提出的创新方法理论体系。 技术进化原理是发明问题解决理论的核心,而解决矛盾是技术系统进化的推动力。阿奇舒勒依据世界上著名的发明,研究了消除矛盾的方法并建立了一系列基于各学科基础知识的发明创造模型。这些模型包括发明原理(Inventive Principles)、发明问题解决算法(Algorithm for Inventive Problem Solving,ARIZ)及标准解(TRIZ Standard Techniques)等。在利用TRIZ解决问题的过程中,设计者首先将待设计的产品表达为TRIZ问题,然后利用TRIZ中的工具,如发明原理、标准解等,求出该TRIZ问题的普适解或称模拟解(Analogous solution),最后设计者再把该解转化为该领域的解或特解。图2表明了利用TRIZ进行问题求解的全过程。
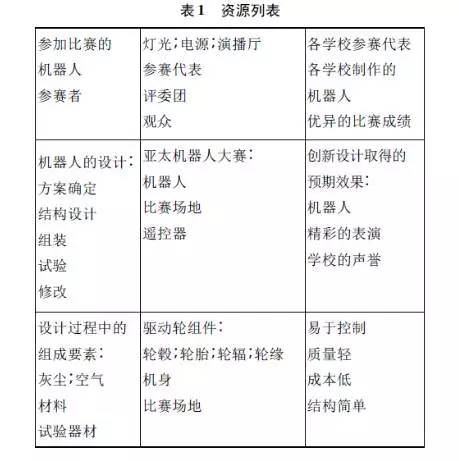
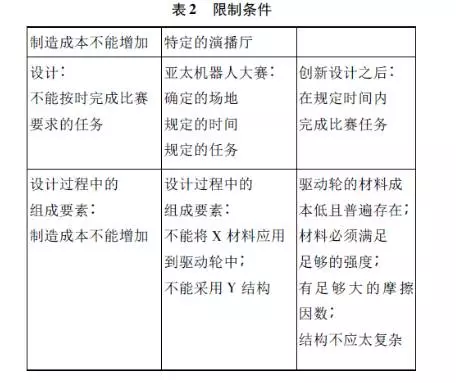
定义驱动轮问题 2.1.1问题描述 根据上述分析,进行问题描述并提出问题。 问题描述:由于比赛场地较光滑,驱动轮与地面的摩擦力较小,易发生打滑现象,导致机器人不能在规定的时间内完成比赛任务。 问题的提出:如何提高驱动轮与地面的摩擦力,避免发生打滑? 2.1.2资源和限制 设计中的可用资源对创新设计起着重要作用。 CREAX把资源的运用整合在问题的定义过程中,利用“九屏图”分析系统中存在的资源及其限制条件。 表1和表2分别为机器人系统中的资源和限制条件。 2.1.3问题再定义 Redefinition工具用来协助设计者探索问题,激发个人的想法并建立阶层式的问题描述架构,通过“Why”和“What’s stopping”两个问题分别扩展和缩小最初定义的问题的范围。基于这两个方面对问题进行分类描述,确定阻碍问题解决的因素和解决问题后想要达到的目标。图3是建立的机器人驱动轮的阶层式问题描述框架。
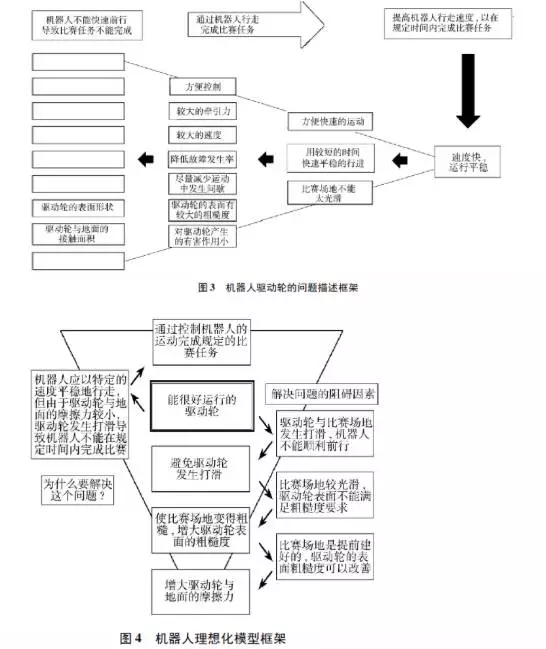
2.1.4理想化 TRIZ中,一个理想化的系统或产品可定义为:一个可以执行其预期的功能但却不存在的系统或产品。理想化反映了一种如何将系统资源最大利用的想法与概念。技术进化法则是TRIZ的核心,而提高理想度是技术系统进化法则中最重要的一条进化模式,理想化进化模式是指系统向增加理想化水平方向进化。它为创新问题的解决指明了努力方向。图4为利用CREAX Innovation Suite建立的机器人理想化框架。
通过对问题的再定义,明确了解决问题的一些阻碍因素及要达到的目标;运用理想化工具,则可以帮助设计者确定出最终理想解。问题的解越接近理想解,可用资源越重要。通过这两步分析,可以将问题细化为改变驱动轮的表面形状和增加驱动轮与地面的接触面积。根据上述问题的定义,运用矛盾矩阵和发明原理对问题进行求解。 产生解决方案 TRIZ研究解决物理矛盾和技术矛盾的方法。技术矛盾是指传统上的工程“折中”,由于系统中一个因素的影响导致某一方面的要求不能得到满足。简单的说,系统一个方面特性参数得到改善时,另一方面特性参数恶化了。TRIZ提出的40条发明原理用以指导矛盾的解决和产品的创新设计。39个工程参数描述了设计问题的问题空间,而40条发明原理则描述了设计问题的解空间。为了得到问题的解,须建立问题空间与解空间之间的映射关系,这个映射关系就是矛盾矩阵。 通过分析机器人驱动轮的技术矛盾并用39个标准工程参数进行描述定义其技术矛盾。欲改善的参数分别为运动物体的面积和形状,与之恶化的参数为运动物体的质量和力。矛盾矩阵列于表3,改善参数与恶化参数交叉的方格内列出的是推荐使用的发明原理序号。
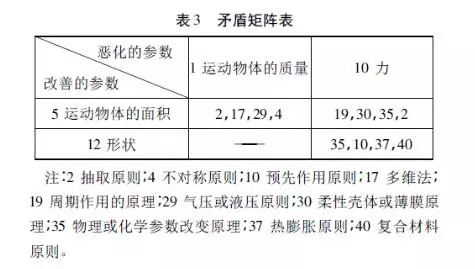
表3中提供了进行创新设计的发明原理,通过对资源表进行分析,系统中的可用资源包括驱动轮及一些低成本、普遍存在的材料,因此选择17多维法和40复合材料原理进行机器人驱动轮的结构设计。 3.驱动轮结构方案的确定 根据CREAX Innovation Suite矛盾矩阵表推荐的17号多维法和40号复合材料原则,设计以下3种驱动轮结构。应用之前分析的资源,根据多维法设计了3种表面形状,并利用复合材料法在橡胶里面粘贴一层海绵以增加缓冲作用。图5为确定的驱动轮结构方案。
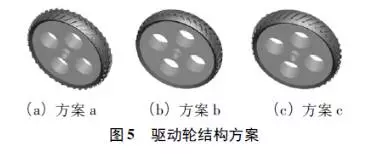
对于同一个问题,并不是单纯的采用一种发明原理来进行方案设计,同一个方案也并不是只用到一种发明原理。对照矛盾矩阵表3和驱动轮结构方案图5,进行分析可得出以下结论: (1)对于运动物体的面积和运动物体的质量及运动物体的面积与力两对矛盾,解决原理中都包含2号原理(抽取原则)。经实验测试,从3种结构设计方案中选择满足要求的a方案,即是用到了此项原理。 (2)方案c采用了不对称原则,在实际应用时可以成对使用同样可以增大与地面的摩擦力;方案a和方案b中两排花纹有一定的偏距,也用到了此原则。 (3)通过预先改变驱动轮的表面粗糙度,以增大其与地面的摩擦力,防止比赛时发生打滑。用到了预先作用原则。 (4)在橡胶里面粘贴了一层海绵不仅是运用了复合材料原则,同样用到了30号柔性壳体或薄膜原理。 因此在问题的解决过程中要多个原理同时使用,综合运用多个原理解决同一个问题,不仅可以拓展人的发散思维,找出解决问题的多个途径,并能为以后解决类似问题提供一定的思路。
4.结论 以机器人驱动轮为例,利用TRIZ解决其摩擦力问题。TRIZ是解决发明创新问题最有力的理论工具,由39个技术矛盾特性参数和40条创新原理组成的矛盾矩阵是TRIZ中解决技术矛盾的有效工具。在实际工作中,遇到需改进或创新的问题时,按照TRIZ的方法进行矛盾分析,将其用39个技术矛盾特性参数进行表示从而转化为TRIZ问题,然后对照矛盾矩阵表中推荐使用的对应创新原理,依据经验及所学知识进行发散性思维来解决问题。 运用TRIZ不仅可以帮助设计者系统的分析问题,准确确定问题的探索方向,而且提供了解决问题的新思路、新方法,减少了设计过程中的盲目性,加快了创造发明的进程从而得到高质量的创新产品。最重要的是帮助设计者打破思维定势,以一种新的视角分析问题,可以大大提高其创新能力。
基于人工肌肉的机器人驱动关节设计与研究
提出一种基于人工肌肉的新型驱动关节设计方法,用于提高机器人的驱动性能.通过定义关节结构的笛卡儿坐标系统,建立了反映关节结构参数与工作空间、结构强度、动力学特性之间关系的数学模型.在上述分析的基础上。采用多目标规划算法对驱动关节进行优化设计,并给出相应的设计变量、目标函数、约束条件和求解方法.
机器人的关节驱动系统是机器人的重要部件之一,仿袋鼠机器人、仿人型跑步机器人等都需要结构紧凑、能提供爆发力的驱动关节.研究表明,仿人型跑步机器人起跳时腿关节所需力矩约为520 N·m,而目前采用稀土永磁技术的LWX型无刷直流力矩电动机(重14.5 ks)只能产生约25 N·m的力矩.与电机驱动配套的减速装置、传动装置使得机器人关节结构复杂、效率低,还会引起噪音.为了获得输出力矩大、结构简单、运动范围大、易于控制的机器人关节,国内外专家和学者纷纷展开研究,并取得了一系列成果。机器入驱动关节设计受到广泛重视,基于人工肌肉的关节设计成为研究热点. 但是,采用人工肌肉驱动的机器人关节由于结构的限制,目前还只能提供单自由度和较小的输出力矩.本文在尽可能符合生物关节运动特性的基础上,采用人工肌肉提供关节驱动力,进行机器人驱动关节的一体化设计,以增加关节的输出力矩和灵活度,简化结构和控制环节,提高机器人的综合性能.
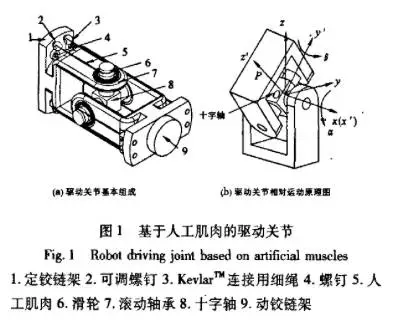
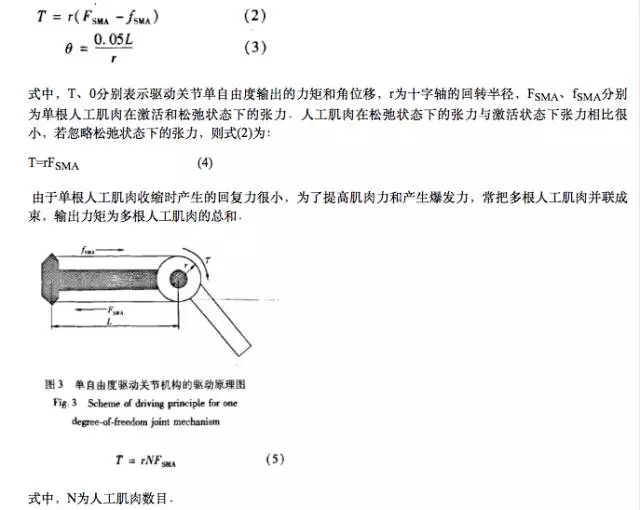
1.关节结构设计(Design of joint mechanism) 基本组成 图1(a)是基于人工肌肉的驱动关节结构示意图,结构主体为胡克铰机构,由定铰链架l、十字轴8、动铰链架9组成,滑轮6固接在十字轴上,人工肌肉5两端通过KevlarTM被动细绳3与可调螺钉2、滑轮6连接,螺钉4连接关节与机器人主体.人工肌肉主动收缩时,拉动滑轮旋转,继而带动十字轴及动铰链架旋转,产生关节俯仰(pitch)、侧摆(yaw)及它们的复合运动. 坐标系与变量描述 驱动关节的主体结构是一个胡克铰,两铰链架沿着相互垂直的轴线有两个相对转动的自由度,如图l(b)所示.在胡克铰的中心点0建立与位于下方的铰链架(以下简称定铰链架)固联的定坐标系Oxyz.x轴为其两侧壁圆孔中心连线方向,Y轴与其底面平行且与x轴垂直,z轴与其底面垂直;同时建立与另一铰链架(以下简称动铰链架)固联的动坐标系0’x’y’z’。y’轴为其两侧壁圆孔中心连线方向,x’轴与其底面平行且与y’轴垂直,z’轴与其底面垂直.初始状态下,两坐标系重合.胡克铰的运动可以描述为:铰链架2先绕动坐标系的x’轴旋转α角,再绕动坐标系的y’轴旋转β角. 设动铰链架底面中心点P到十字轴中心0距离为P,则P在坐标系Oxyz下的坐标为:

α,β反映了驱动关节两个自由度的运动幅度.给定α、β的值,就能根据式(1)求出P在任何位置的坐标;反过来,P要达到工作空间内任何一点的位置,都可以通过反向运动学求出α、β。 工作空间 驱动关节机构的工作空间分析,就是在考虑人工肌肉变形前提下,求关节所能达到的空间位置.式(1)反映了点P坐标与α、β之间的关系,研究结果表踢,胡克铰的工作空间与铰链架外侧壁间距、两内侧壁间距、底面宽、两孔轴线与铰链架底面外侧的距离、两孔轴线与铰链架底面内侧的距离有关,胡克铰用作驱动关节结构的主体框架,其工作空间还受肌肉变形量影响,肌肉纤维和滑轮还会与侧壁产生干涉,这使得用数学建模的方法求解α、β十分困难,本文采用“模型拟合法”求驱动关节的工作空间,步骤如下: (1)用UG构建驱动关节的零件实体并完成装配; (2)利用Parasolid接口技术,把装配体导人多体动力学分析软件ADAMS; (3)添加肌肉驱动仿真模型; (4)在定铰链架和地之间建立固定副,分别在动、定铰链架和十字轴之间建立转动副,在定、动铰链架之间添加接触,由此,构建完成基于人工肌肉的驱动关节的多体动力学系统; (5)结合ADAMS传感器和测量器的使用,进行脚本控制仿真,取a=l,10,20,⋯,30°等一组值,求得定、动铰链架开始接触时的β值,同时记录P点的坐标;
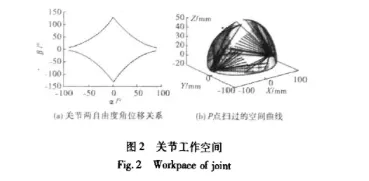
(6)用Matlab函数polyfit求α、β的最小二乘曲线拟合. 图2(a)是求得的关节两自由度角位移的最小二乘拟合曲线.图中曲线上的点表示仅饵能够达到的最大值,曲线围成的部分是两自由度能达到的任意角位移.图2(b)是关节上P点扫过的空间曲面,由图可见点P能够达到以P为半径的球冠上的任意位置.
2.关节结构的多目标规划(Multi-objective programming of joint mechanism) 动力学分析
如图1(a),驱动关节两个回转轴线交于一点(十字轴中心),前面的转动(α)使得有关的回转轴线的位姿发生变化,而后面的转动(β)按照已经发生变化的回转轴转动,仿生关节驱动器结构解耦而且运动解耦,即确定了两个运动位移α、β,改变运动次序,关节到达相同的空间位置坐标.取一对人工肌肉、十字轴和一个铰链架组成一个单自由度力学模型,如图3所示,建立人工肌肉的力学特性、驱动关节结构尺寸和输出特性之间的关系。
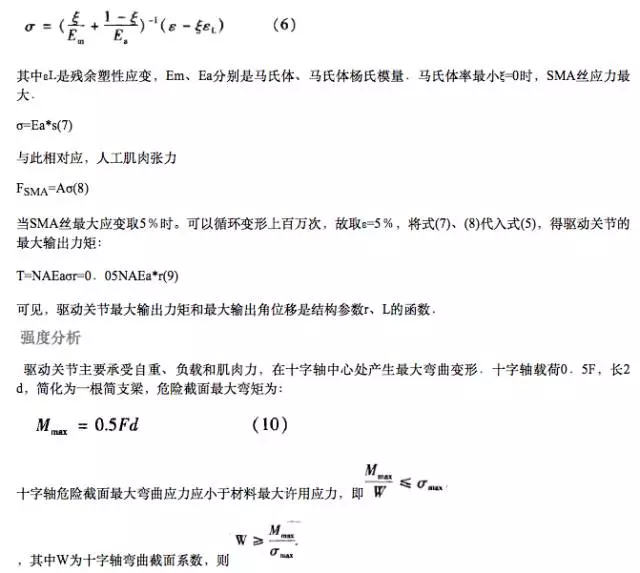
目前,被广泛采用的人工肌肉有形状记忆合金(SMA)、聚合物、气动肌肉驱动器(Pneumatic MuscleActuator,PMA),本文采用经过预应变处理的镍钛形状记忆合金丝作为驱动关节的类肌肉驱动;SMA具有形状记忆效应,其特性与骨骼肌相似:给镍钛形状记忆合金丝通电流加热,热量使SMA丝由奥氏体转变成马氏体,相变过程中SMA丝产生回复张力,拉动杠杆机构产生关节运动.SMA具有比压电陶瓷更大的应变,比PMA更易于实现小型化,比聚合物更容易实现控制。在实验测定的基础上建立SMA丝的一维本构模型:在任何给定马氏体率ξ下,应力or与应变ε的关系可表示为:
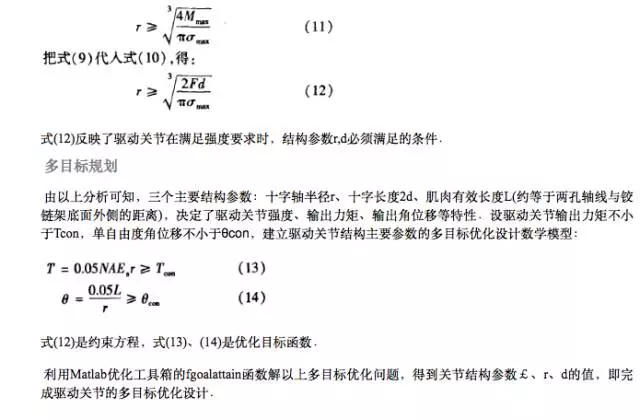
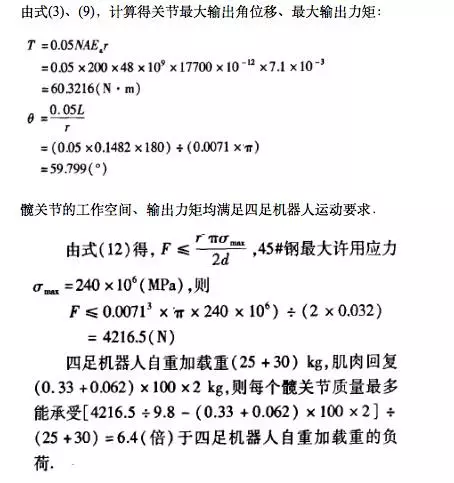
3.实例计算及分析(Calculation and analysis of an example) 以某四足机器人(见图4(a))设计为例,采用上述方法设计髋关节.四足机器人对髋关节的设计要求见表1.

关节材料采用45#钢;人工肌肉采用美国Dynal·loy公司的镍钛形状记忆合金丝Flexinol®,其参数见表2.设计得到的驱动关节如图4(b)所示,其结构尺寸见表3.
4.结论(Conclusion) 提出一种基于人工肌肉的机器人驱动关节设计方案,该关节采用胡克铰作为主体框架,采用预应变的SMA丝人工肌肉提供驱动力.建立了驱动关节的三维几何模型并分析其工作空间,建立了计算关节机构输出力矩和角位移的动力学模型,并利用多目标规划方法对关节结构进行优化.最后通过一个四足机器人髋关节的设计实例验证了该方案的正确性.分析结果表明十字轴长度等三个主要结构参数决定了输出力矩等关节特性,胡克铰和SMA人工肌肉的结合使用使驱动关节满足大中型机器人对关节运动的需求. 按照本文方法设计的机器人驱动关节,在不增加机器人腿部体积的前提下,增加输出力矩、自由度、灵活度和步态的多样性,提高机器人的整体性能. 另一方面,SMA能量转换率较低,当人工肌肉由一组并联的SMA丝捆扎而成以产生爆发力时,由于材料特性和加工工艺的制约,实现小型化还有困难,随着高性能人工肌纤维的开发,基于人工肌肉的机器人驱动关节的整体性能可望显著提高.
两栖机器人轮桨腿驱动机构多目标优化设计
提出了一种既能够在陆地上爬行,又能够在一定深度的水下浮游和在海底爬行的新概念轮桨腿一体化两栖机器人;多运动模式和复合移动机构是该机器人的突出特点.分析了轮桨腿复合式驱动机构的运动机理,并采用多目标优化设计理论和算法,对驱动机构的爬行性能和浮游特性进行了综合优化,得到了两栖机器人驱动机构的结构优化参数.虚拟样机的仿真结果证明了该轮桨腿一体化两栖机器人驱动机构的综合运动性能良好,对非结构环境具有一定的适应能力.
两栖机器人是一种能够在陆地和水中实现特定运动或作业的特种移动机器人.根据两栖机器人驱动机构和运动形式的不同,现有的两栖机器人大致可以分为单一驱动型和复合驱动型两大类.单一驱动方式的两栖机器人,无论是多足式、波动式、轮式、履带式等,都很难完全满足机器人在水中或者在陆地上的速度、越障、机动性、稳定性等方面的要求.为了实现两栖机器人分别在水中和陆地上多种模式下的高性能运动,开发研制新式的复合驱动机构成为近年来两栖机器人研究的一个重点.本文以正在研制中的轮桨腿一体化两栖机器人为研究对象,针对两栖机器人运动和作业环境的不确定性特点,提出一种既能实现陆地爬行、又能实现水中浮游的新型轮桨腿驱动机构.爬行和浮游是两栖机器人最为典型的两种运动模式,采用轮桨腿驱动机构来实现机器人的不同模式运动并使机器人具备一定的运动性能,无疑对机器人的驱动机构设计提出了严峻的挑战. 在分析驱动机构的运动机理和特性的基础上,采用多目标优化理论和算法,对驱动机构在爬行状态下的越障性和稳定性,以及浮游运动的推力特性进行了多目标优化设计研究,并对其虚拟样机进行了运动仿真和水动力试验,试验结果表明,该轮桨腿一体结构的驱动机构能够实现两栖机器人在特定条件下的爬行和浮游运动,满足两栖机器人在非结构环境下的运动要求.
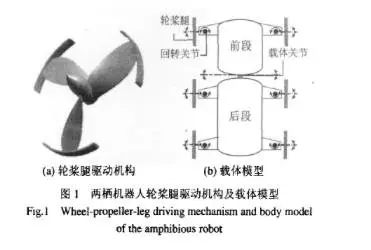
1.驱动机构运动机理与运动实现 复合移动机构是一种针对复杂的非结构环境,综合两种或两种以上移动方式的优点而设计的新型移动机构,具有较强的环境适应能力.轮桨腿一体化两栖机器人综合衡量机器人在水中和陆地常用的运动方式及运动特点,提出将水下机器人最常用的螺旋桨推进器与陆地爬行机器人的驱动轮一腿结合为一体,且实现了爬行和浮游两种运动模式的自动切换. 基于仿生学原理,轮桨腿一体化两栖机器人借鉴六足纲昆虫爬行特点,采用六足爬行;根据柔性体具有较好的灵活性的特点,将机器人载体整体分为前后两段,中间通过可控的载体柔性关节驱动,改善机器人的越障性能;同时,在浮游运动时,载体关节可以改变载体前段的迎流面积,进而起到控制载体俯仰姿态的作用.两栖机器人轮桨腿一体化驱动机构及载体模型如图1所示.
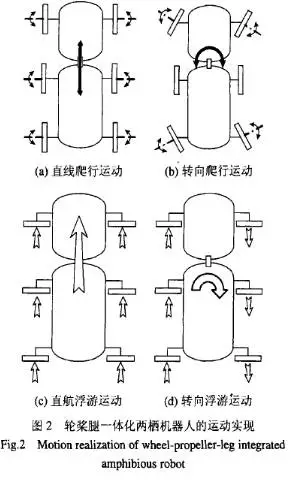
轮桨腿一体化两栖机器人采用13个驱动电机分别驱动载体关节和6组轮桨腿驱动模块,实现机器人的爬行和浮游以及两种运动模式的切换.两栖机器人的爬行运动可视为平面运动,其白由度数为16,此时轮桨腿驱动机构发挥轮腿的作用,依据六足爬行动物三角步态的运动原理实现动作,实现机器人的前进或者后退,如图2(a)所示;在回转关节的驱动下,轮腿机构转动一定的矢量角度,达到左右转向的目的,如图2(b)所示.在浮游运动时,两栖机器人的运动为空间运动,其自由度数为19,此时轮桨腿驱动机构主要发挥螺旋桨的功能:问转关节控制轮桨腿机构的矢量角,通过对驱动电机方向和速度的控制,实现机器人在水中的直航或转循,如图2(e)、(d)所示
2.驱动机构多目标优化设计 影响两栖机器人综合驱动能力的因素很多,除了机器人载体的结构形式之外,还有轮桨腿驱动机构的儿何参数,每个设计参数对驱动能力的作用机制各不相同.传统的设计方法是依靠经验,在设计循环中通过单一参数的调整得到结构的优化设计结果,而忽略了参数间的祸合关系,所以通常得到的设计方案一般不是全局最优设计方案. 为了在全局范围内实现轮桨腿驱动机构的综合运动性能最优设计,本文首先建立机器人在不同运动模式下目标函数的数学模型或近似模型,然后在集成优化软件iS IG H T平台环境下,运用多目标优化算法对多目标函数进行优化求解,最后得到轮桨腿一体化两栖机器人载体形式及其驱动机构的优化设计方案
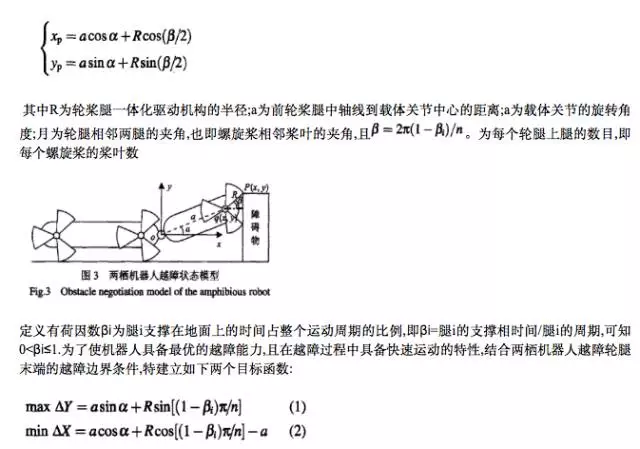
目标函数的数学模型 两栖机器人驱动机构实现了爬行和浮游运动模式白动切换,保证了机器人基本的爬行和浮游运动能力,但同时还应该保证机器人在不同运动模式下具有良好的运动性能:爬行模式下,两栖机器人具有一定的越障性和稳定性,体现其对非结构环境的适应能力;浮游模式下,两栖机器人驱动机构应保证载体具有良好的推进能力. (l)越障性能 越障性能是体现机器人对非结构环境适应能力的一项主要指标,轮桨腿一体驱动机构和载体柔性可控关节为机器人具有良好越障能力提供了前提条件,为了实现机器人越障性能的最优化,需要对轮桨腿驱动机构的具体结构参数进行优化设计.建立如图3所示的越障状态下的机器人几何模型,在图示的坐标系下,通过几何分析可得以下参数:
(2)稳定性分析 机器人运动的稳定性是衡量机器人运动性能的一个重要指标.在静态条件下,两栖机器人本体结构的设计能够满足机器人的静稳定性要求;在爬行过程中,轮桨腿驱动机构参数的设计和三角步态的规划将影响机器人的动稳定性.
本文利用两栖机器人在垂直方向的质心变化量来表征机器人的动稳定性.两栖机器人在爬行过程中借鉴六足爬行动物的爬行特点,采用三角步态运动机理.若有荷因数βi满足0.5<βi≤1,则根据三角步态运动机理,两栖机器人爬行时能够保证同时有3条轮腿支撑地面,此时机器人质心没有垂直方向的变化,即为动稳定状态;若0<βi≤0 5,则在一个运动周期内,单个轮腿的有荷弧长可以表示 为:l0=2βiπR/n,悬空弧长为:le=2(1一βi)πR/n.根据三角步态机理,在机器人运动的一个周期内,悬空的弧长为:△l=(le一lo)/2,进而可得到悬空角:θ=△l/R,此时两栖机器人轮腿驱动机构在轮多边形几何原理下的振动幅值(即机器人质心的变化量)为:

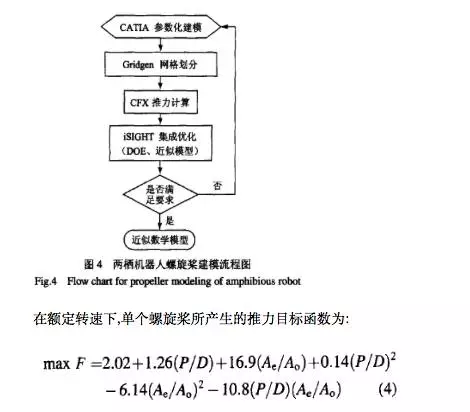
(3)浮游特性 在流体环境下,轮桨腿一体化两栖机器人的浮游运动模型以及螺旋桨推力模型比较复杂,依据现有的理论方法很难得到机器人载体及螺旋桨准确的数学模型.根据轮桨腿驱动机构在浮游运动时发挥螺旋桨功能的特点,以单个螺旋桨产生的推力值最大为目标函数进行轮桨的优化设计.根据螺旋桨的相关设计理论,在一定转速下,螺旋桨产生的推力为螺旋桨几何参数(如螺距p、直径D、盘面比Ae/A。等)的函数.
本文螺旋桨的优化设计,是在集成优化设计软件iSIG HT环境下,通过集成螺旋桨的参数化模型、网格划分和水动力计算,并以试验设计(D OE)为技术手段,最终得到螺旋桨在额定转速下的二阶响应面近似模型,其具体实现流程如图4所示
多目标优化设计 两栖机器人轮桨腿一体化驱动机构是一种融合了多种运动模式的复合型驱动机构,轮桨腿一体化的设计要求机器人具备良好的综合运动性能. 综合以上的分析,联立l()、(4)式得到轮桨腿一体化驱动机构综合运动性能的优化目标函数:
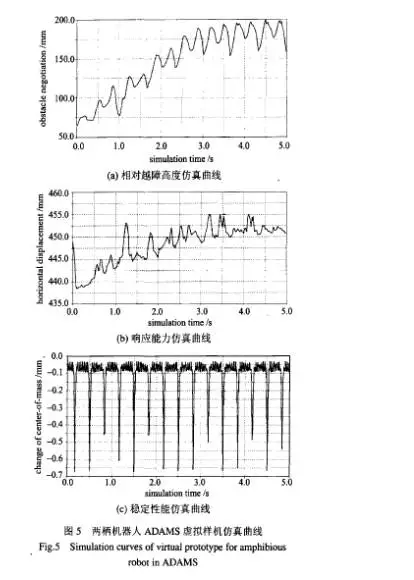
3.仿真试验 轮桨腿一体化两栖机器人复合型驱动机构能够实现机器人爬行和浮游两种运动模式,在不同的运动模式下,机器人呈现不同的运动学和动力学特性.结合两栖机器人驱动机构多目标优化设计的结果,分别在机械动力学仿真软件A D A M S和水动力学仿真软件CXF平台下,对优化后的两栖机器人爬行和浮游状态的运动性能进行仿真分析.在A D AM S软件下建立轮桨腿一体化两栖机器人的虚拟样机模型及其仿真环境,对机器人的爬行性能进行仿真研究.仿真试验的开始时间为两栖机器人遇到障碍物的初始时刻,载体关节以一定的角速度旋转直至达到机器人越障机构允许的最大越障高度,从而分别得到机器人越障能力和快速响应能力的仿真曲线,如图5(a)、(b)所示.两栖机器人在三角步态规划下爬行稳定性的仿真试验结果如图5(e)所示.
在水动力仿真软件CXF平台下建立优化后的单个轮桨仿真模型,如图6(a)所示,通过水动力计算得到单个轮桨在额定转速下产生的推力值,其流场分布如图6(b)所示
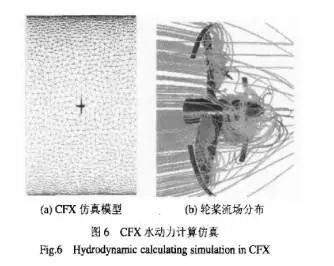
由仿真结果可见:爬行状态下,轮桨腿一体化两栖机器人的相对越障高度最大值为199.37mm,没有达到理论计算值高度的主要原因是机器人在越障时受爬行步态的影响;越障时的快速响应特性:水平方向最大位移变化量为16.5 7 mm,在理论计算值的误差范围内;在三角步态下机器人质心在垂直方向最大变化量的仿真值为.0 67,与理论值基本吻合;浮游状态下,机器人单个轮桨在额定转速下产生的推力仿真值为7.15N,与理论值基本一致.由于两栖机器人在越障过程中前段载体在载体关节的驱动下“抬起”,此时机器人主要依靠后段载体上的两对轮桨腿模块实现运动,如图3所示.在这一过程中,机器人的爬行仍沿用三角步态爬行机理,导致机器人的爬行出现较大的颠簸振动,致使出现图5(a)、(b)所示的波动现象.为了保障机器人在越障中仍能够保持较好的稳定性能需要对机器人后段载体的两对轮桨腿驱动模块的步态进行重新调整,同时对前段载体的一对轮桨腿驱动模块进行新的步态规划,这将是下一阶段重点研究的内容之一.
提出一种具有多运动模式和复合移动机构特点的新型轮桨腿一体化两栖机器人,通过分析两栖机器人轮桨腿驱动机构的运动机理和运动特性,建立了轮桨腿一体化驱动机构的多目标优化设计数学模型,采用多目标优化理论和算法,对驱动机构的爬行性能和浮游特性进行了综合优化,得到了优化的驱动机构结构参数;两栖机器人三维虚拟样机爬行试验和C F X平台下的水动力仿真证明,该轮桨腿一体化结构的驱动机构能够满足两栖机器人对爬行时的越障能力和稳定性的要求以及对浮游时的推进力的要求,是一种相对高效的复合式移动机构,为进一步的原理样机的加工制作提供了可靠的理论保障. 牵引机器人驱动结构的设计
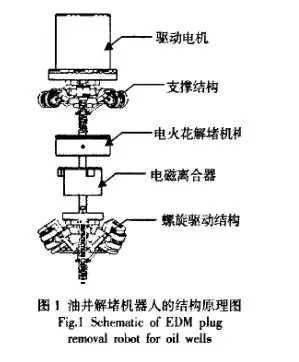
1.电机选取 电机大致可细分为以下几种:
交流伺服电动机 包括同步型交流伺服电动机及反应式步进电动机等。
直流伺服电动机 包括小惯量永磁直流伺服电动机、印制绕组直流伺服电动机、大惯量永磁直流伺服电动机、空心杯电枢直流伺服电动机。
步进电动机 包括永磁感应步进电动机。 速度传感器多采用测速发电机和旋转变压器;位置传感器多用光电码盘和旋转变压器。近年来,国外机器人制造厂家已经在使用一种集光电码盘及旋转变压器功能为一体的混合式光电位置传感器,伺服电动机可与位置及速度检测器、制动器、减速机构组成伺服电动机驱动单元。 机器人驱动系统要求传动系统间隙小、刚度大、输出扭矩高以及减速比大。 一般机器人通常采用无刷直流电动机,包括启动、换向都是通过安装于定子或转子上的各种传感器作为反馈来进行控制的。通常使用的传感器有旋转变压器、光电码盘及霍尔传感器,其中前两者原理简单,但是需要较大的空间来安装,这对于牵引机器人自身构造及细长结构的电机本体来说是很难实现的;对于霍尔传感器,霍尔元件的高温高压下温度特性又限制了它的应用。因此本驱动单元拟采用无传感器控制的无刷电动机。
2.牵引机器人驱动单元的结构 驱动结构设计 水平井牵引机器人的驱动原理图如图1所示,驱动电机通过减速器和过载保护器2将转矩传递到主轴3。主轴通过锥齿轮副7带动链轮链条将转矩传递到驱动轮5,驱动轮旋转带动牵引机器人前进。

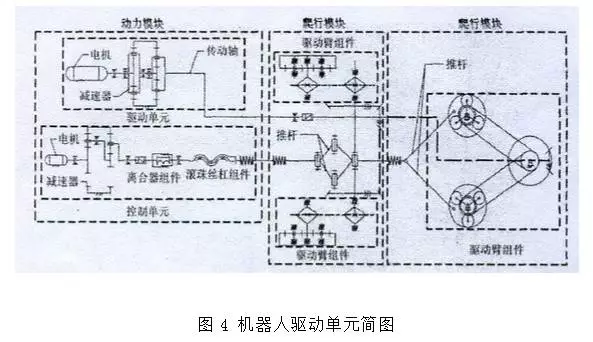
图2所示为牵引机器人驱动单元的示意图,由动力模块和爬行模块组成。动力模块是基础模块,主要功能:一方面控制爬行轮的张开和收合,由动作电机、滚珠丝杠副、套筒、压缩弹簧组成;另一方面要驱动爬行轮的转动,主要由驱动电机、减速器、传动轴组成,驱动电机与传动轴要在套筒中心穿过。每台机器人必须配备一套动力模块。爬行模块由推杆座、压缩弹簧、推杆、大小锥齿轮、链轮、链条、爬行轮系组成。
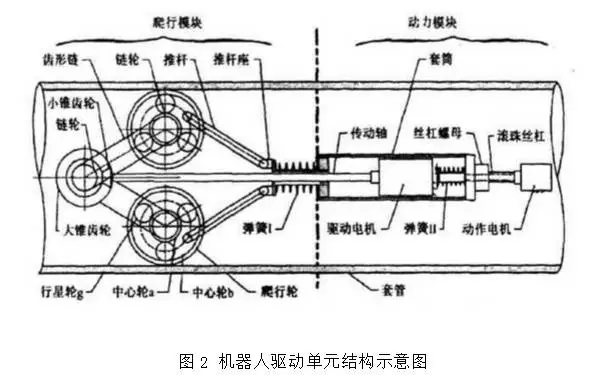
爬行模块的常用组合形式 目前的轮式管道机器人多采用一组固定数量的爬行轮,为了获得足够大的牵引力,应在爬行轮与油管内壁之间产生足够大的摩擦力,因为摩擦系数一定,所以只能提高爬行轮与管壁之间的正压力。这就要求轮式机构具有足够的强度和刚度,势必导致零件的结构尺寸增大,不能在小直径油管内工作。如果采用模块化设计,即采用多组爬行模块并按一定方式组合,就可以将载荷分配到多个爬行轮上去,从而减小各零件的尺寸,使机器人的径向结构更加紧凑。爬行模块的数量根据牵引力的大小来选择,通常选用两组爬行模块串联,圆周方向互成90°布置. 每一组爬行轮与油管内壁的接触线与油管的对称面并不重合,存在偏心e.通过调整偏心的大小,可以改变爬行轮的直径,同时也能调整丝杠副的直线行程。这种结构优点在于爬行轮可完全收回,收回后两轮可以重合,从而可以使机器人的径向尺寸做到最小,这是从另一方面来减小机器人径向尺寸的方法。 模块化驱动单元的机构原理 图4所示为牵引机器人驱动单元传动系统的原理图,从图中可以看到,传动系统是由两大部分组成的:控制爬行轮张开、闭合的机构和控制爬行轮转动的机构。为了获得小的外形尺寸和布线的方便,两套传动机构采用同轴同侧布置。
爬行轮张合机构(控制单元)的主要功能是控制牵引机器人的两组爬行轮的打开与闭合,在牵引机器人爬行时,提供足够的正压力,使驱动轮与油管内壁之间有足够的摩擦力,主要包括电机、行星减速器、电磁离合器、滚珠花键、滚珠丝杠组件、推力套筒、推杆、压缩弹簧组件。 爬行轮转动机构(驱动单元)的主要功能是控制牵引机器人的”行走”,为其提供动力,主要包括电机、行星减速器及传动轴。驱动单元结构特点:减速比大,输出扭矩大,传输距离长。如本方案拟采用的电机转速为10000r/min,爬行轮转速约为50r/min,减速比为240,输出扭矩66N·m,从电机到第一组爬行轮的轴向距离为1400mm。
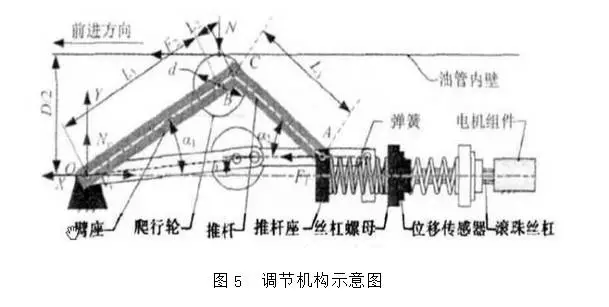
3.牵引力调节机构的力学特性 图5所示为牵引机器人的牵引力调节机构,通过滚珠丝杠副将电机的旋转运动转变为螺母的直线运动,推动推杆来调整爬行轮与管壁之间的压力。为了增加机构的柔性,在推杆与丝杠螺母之间增加了一个弹性环节,一方面可以吸收运动过程中产生的振动,使机器人工作平稳,减少对携带的仪器产生冲击;另一方面也增加了爬行轮的自动调节功能,可以在一定范围内实现爬行轮的自动收张,避免了频繁通过电机来调整。
4.调节机构的工作过程 打开过程:电机通过大速比的行星减速器(减速比大于100)驱动滚珠丝杠旋转,丝杠螺母沿轴向移动(螺母周向固定),推动压缩弹簧组件带动推杆绕铰接点A转动,推杆通过铰接点C带动驱动臂座绕铰接点O旋转,使爬行轮朝油管内壁方向运动,当爬行轮与油管内壁接触后,因为推杆AC与臂座OC及OA构成了封闭三角形,所以此时爬行轮不能再继续移动(见图1)。这是若螺母继续移动,将使螺母与推杆座之间的弹簧被进一步压缩,通过改变弹簧的压缩量可以控制爬行轮与管壁之间的正压力。在实际应用中可用位移传感器来替代压力传感器作为反馈环节。 收回过程:正常情况下爬行轮的收回是通过电机反转来实现的。在当电机发生故障或系统突然断电的情况下,如采用1图所示的机构,爬行轮将不能收回,发生卡滞。为了避免发生这种情况,应在电机组件之间增加了一个自动离合器(图中未画出)当系统出现故障时,通过离合器切断减速器与丝杠之间的联接,利用滚珠丝杠不能自锁的特性,在压缩弹簧的推动下,丝杠螺母驱动丝杠反转,使爬行轮自动收合,可以避免发生爬行轮卡滞。
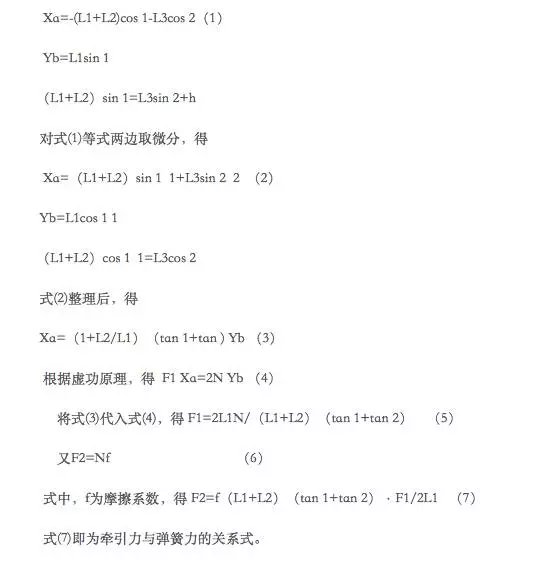
5.调节机构力学模型 如图5所示,以固定支点O为坐标系的原点,建立坐标系XOY,L1是臂座OC的长度,L2是支点B到固定支点A之间的距离,L3是推杆CD的长度, 1是臂座OC与水平方向之间的夹角, 2是推杆CD与水平方向之间的夹角,N为管道内壁作用在爬行轮上的压力,F1是弹簧作用在推杆上的轴向推力,F2是单个爬行轮提供的牵引力。如图1所示,在坐标系XOY中有
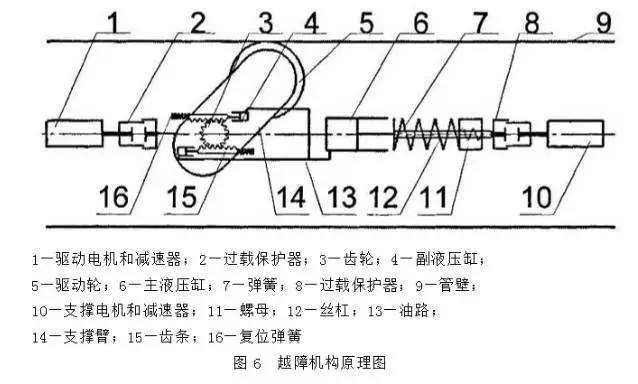
6.越障机构分析 在曲柄滑块调节方式的基础上,本文提出一种由齿轮齿条和柔性支撑单元等组成的越障机构,图6为越障机构示意图,在支撑臂展开的过程中支撑电机通过减速器10及过载保护器8带动丝杠12旋转,推动螺母11向前运动,螺母压缩弹簧7,弹簧推动主液压缸活塞杆使主液压缸及油路内产生油压,油路中油压使副液压缸活塞杆运动,活塞杆推动齿条15,齿条带动固连在支撑臂上的齿轮3旋转,支撑臂将驱动轮压紧在管壁上产生封闭力。在弹簧力达到设定值时电机停止转动,螺母自锁。在支撑臂收回过程中支撑电机反转,丝杠带动螺母退回,弹簧力减为初始值,液压缸及油路内油压减为初始值,在复位弹簧16推动下齿条复位,支撑臂收回。
主要确定适应井下环境的最佳运动方式为轮式,并以此为基础,分析讨论了水平井牵引机器人结构的设计问题,对驱动部分进行了系统的分析,提出一种由锥齿轮副和链轮链条组成的驱动机构,最后完成了部分设计,并简述了其工作流程。 通过分析得出结论: 第一:轮式是水平井牵引机器人最优运动方式,轮式水平井牵引机器人具有结构简单、可控性好、牵引力大、行走速度快携带仪器能力强等优点。 第二:水平井牵引机器人的设计主要考虑牵引力和通过性问题,即主要解决驱动结构的设计问题,本文提出的锥齿轮副和链轮链条组成的驱动机构 结构简单,效率高,有效节约了设计空间,同时满足了强度要求。
清扫机器人移动驱动机构的研究
随着生活节奏的不断加快,经济收入和生活品质的不断提高,人们越来越希望能从烦琐的家务劳动中解放出来,同时在高技术产业的带动下,家用清扫机器人应运而生。 本文所研究的清扫机器人主要工作在一般家庭的地板和地毯上,如果把固定式机器人视为对人类手臂动作和功能的模拟和扩展的话,那么具有移动功能的机器人就可对应于人类行走功能的模拟和扩展。清扫机器人移动机构设计的优劣,直接关系到清扫吸尘任务最终执行的好坏。清扫机器人的工作环境较为复杂,既有宽阔的区域又有狭窄的角落;即有静止固定的障碍,又有动态变化的障碍。因此要求在选择移动方式和设计移动机构时,不仅要保证清扫服务的高效,还要保证机器人运动的稳定性和运动控制的便捷性。 通过对几种典型移动机构的对比,提出适合一般家庭工作的行走方案,同时对机器人电机的选择进行了分析。
1.移动机构的对比选择 能够在平面环境中移动的机构形式主要有履带式移动机构、腿足式移动机构和车轮式移动机构。此外,还有适用与特定场合的步进式移动机构、蠕动式移动机构和蛇行式移动机构等。
a)履带式移动机构:着地面积比较大,着地压强小,与路面的黏着力也较强,所以能够在凹凸和松软路面上移动。因此,履带式移动机构比较适用与路面状况比较复杂的场合。 b)腿足式移动机构:适应地面的能力很强,以两足步行机器人为例,它需要获取姿态信息时,通过踝关节力矩反溃控制使其处于柔顺状态,使脚底适应地面情况,测量此时踝关节的角度就可得到姿态信息。但其结构复杂,运动控制的难度较大,且运动的速度比较慢。 c)车轮式移动机构:能高速稳定地移动,能量利用率高,机构简单,控制方便和能借鉴至今很成熟的汽车技术等。
通过对比分析几种移动结构发现,履带式和腿足式都不适合用于家用吸尘机器人的行走机构,前者适合路面情况复杂的情况,而家用机器人的路面情况简单,不需要那么复杂的结构;后者结构极其复杂,各种关节的设计要求都很高,对于简单的吸尘机器人来说显然会增加机器人的成本和加工难度,而且吸尘功能难以实现,因此选用轮式移动机构做为机器人的本体行走机构。它设计简单,控制容易,安全性高。
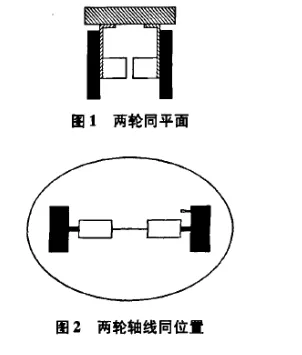
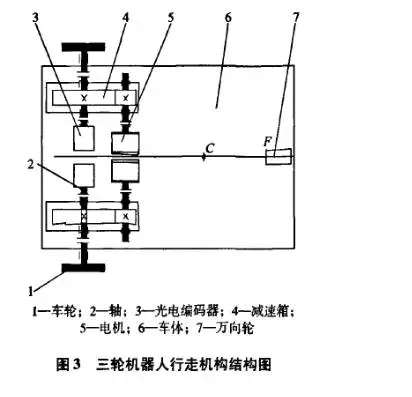
2.机器人轮式结构研究设计及方案的选择 轮式机器人的几种转向 轮式移动机构又分为二轮机构、三轮机构、四轮机构和全方位移动机构,依据机器人结构的不同和所处环境来选择。 a)二轮移动机构的研究:二轮式移动机构的结构非常简单,它和三轮式移动机构一样通过两个驱动轮差动转向,一般驱动轮与电机直接相连,通过对电机的控制改变两个轮子的速度来达到转向的功能,左右车轮处于同一平面内,以此来达到平衡(图1)。安装时要确保两驱动轮的轴线处于同一前后位置上,操作起来很容易,只要在向驱动轮安装架钻孔时事先做好标记就可以了(图2)。当电机与驱动轮直接连接时,还要注意驱动轮彼此同轴,也就是说,驱动轮都对准正前方,否则机器人肯定不会沿着既定的路线行驶。
b)四轮和全方位移动机构研究:四轮机构和全方位机构的转向比较复杂,四轮式移动机构是典型的汽车运动的主要构成部分,一般分为三种转向方式:它们分别是两前轮驱动转向、两后轮驱动转向和四轮互相配合转向,车轮的连接比较复杂,不适合一般的家用机器人移动,而且造成机器人结构繁琐;全方位移动机构可以进行任意的定位和定向,虽然它可以使机器人更加灵活地运动,有着显著的优越性,但它同四轮机构一样甚至比四轮机构更具复杂性和难度。 c)三轮式移动机构研究:三轮式移动机构一般在两轮式的基础上增加一个万向轮或驱动轮,有两种驱动方式,它们分别是两后轮驱动,前轮导向和前轮作为驱动轮,而两后轮为转向轮,用一根轴连在一起。当两后轮驱动时,主动力轮分开置于机体左右两侧,支撑点处应用万向 轮,但考虑到万向轮自身存在转弯半径,为了保持在转弯过程中机器人整体的几何中心不会偏移太大,而造成转弯后丢线,所以两个支撑轮的自身摩擦阻尼应该足够小,采用这种转向结构后,机器人可以做到0半径(几何中心不变)的3600自由转向。 根据机器人完成指定任务要求,机器人必须具备转向灵活,转弯半径尽可能小,即转向过程中机器人本身几何中心偏移量尽可能小,因此选择三轮式作为机器人的行走机构,在转弯的时候,由左、右轮进行差动转弯。进行两轮反向差动转向可以使机器人几何中心保持不动,不会影响转弯后的运动轨迹,完全能达到设计要求。
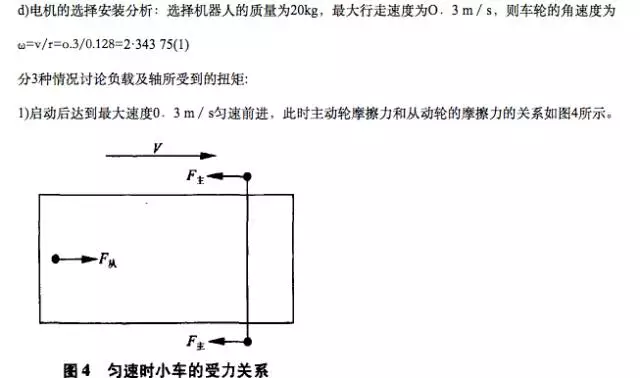
三轮式移动机构的研究 a)三轮式移动机构的机械部分:三轮式移动机构是一般移动机器人都选择的移动方式,它的特点是机构组成容易,旋转中心是在连接两驱动轮的直线上,可以实现零回转半径,清扫吸尘机器人的运动情况,典型的三轮式由两个同一回转中心的固定式轮和一个偏心可定向轮组成。如图3所示为三轮机器人小车框架结构。
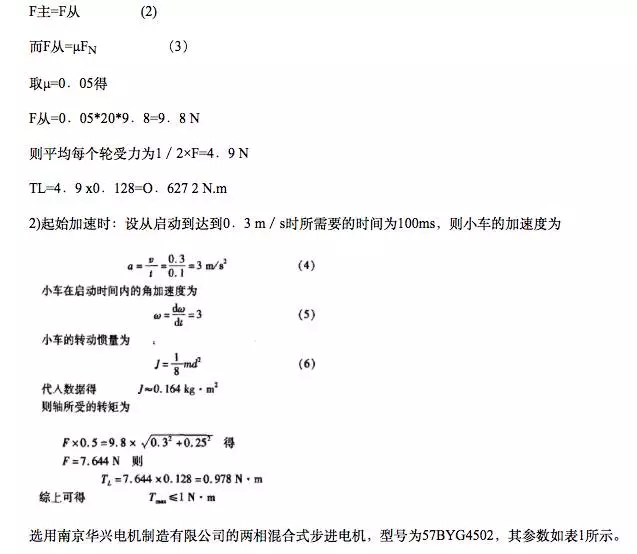
机器人小车的驱动系统由两个步进电机通过齿轮传动分别驱动两固定轮来实现,因此其驱动方式为差动方式,即通过左右轮的不同转速来实现小车的不同运动方式。轮7是偏心定向轮,也称为万向轮,作为小车的随动轮。C点为小车的质心,,点为万向轮相对于小车本体的不动点,光电编码器用于小车定位时输出反馈控制信号,不影响小车的运动模型。在三轮形式下小车可以实现直线运动、圆弧运动和本体质心条件不变下的运动。 b)三轮式移动机构的控制:因为驱动轮是直接和步进电机相连的,所以通过控制步进电机来控制轮子,步进电机通过驱动。 c)移动行走机构几何尺寸设计计算:将移动行走机构归为底箱部分,底箱是整个机器人的基础,其中包括电机、驱动器、电池、光电编码器和刷子等,设两个主动轮安装在底箱前部,差动驱动,主动轮的厚度为50 mrn,直径为256 mm。从动轮的厚度为20 mm,直径为50 mm,两驱动轮的间距为500 mm,主动轮轴中心线距前端为150 mm,从动轮到主动轮的最大距离为300 mm。通过这些数据我们来分析下如何选择行走机构的驱动电机。
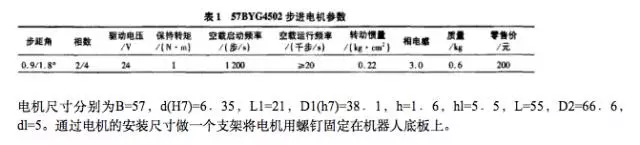
通过对移动机构的对比分析,选择了适合家用机器人的行走方案,同时对移动机构的驱动电机的选择做了分析,归纳不同的环境下机器人驱动的选择。 油井解堵机器人驱动机构的力学特性分析
在石油开采过程中,靠地层自然压力开采原油,最终采收率一般不超过总储最的10%,采用常规注水开发,采收率也不超过(30-40)%,低渗及稠油油藏则更低。其主要原因是由于钻井、完井,井下作业和长期的采油、注水过程中的污染、三次采油中所注聚合物的污染和机械杂质沉淀,使近井地带孔隙通道堵塞十分严重,导致油井产油和注水通道堵塞,使产油,注水量下降,甚至造成停产。如何有效地疏通渗油通道、制造新的渗油裂缝,以提高堵塞井和低渗油井的采收率是目前世界上各石油开采国竞相研究的课题。 目前国内外常用的渗油通道解堵方法有压裂、酸化、挤野等三种较为成熟的工艺方法。这三种工艺方法都存在如下的问题: 它们都需使用化学溶液将近井地带的污染物挤压进地层深部,极易造成二次污染;分层处理比较困难,往往会造成空隙度高的层被处理开,而空隙度差的层收不到效果,使油层动用程度受到影响,甚至将含水层处理开,造成水淹油层;对固井质量不好,套管变形、破损的井处理十分困难,费用较高。 针对匕述情况,作者提出了射孔炮眼内高频电火花解堵的新方法,该方法在解堵时无工作剂人井,避免了对储层造成的二次污染,高频的高温、高压作用在进行解堵的同时还具有一定的驱油效果。本文针对该工艺技术设计出了油井解堵作业机器人,该机器人可以把电火花工具电极送人射孔炮眼进行放电解堵。本文介绍了机器人的结构设计原理,并对其力学特性进行了分析研究。
1.油井解堵机器人整体结构设计 所研制的油井解堵机器人的结构原理图,如图1所示。主要由驱动电机、动力机构、螺旋驱动机构、支撑机构、电火花解堵机构以及检测机构等组成。
工作时,支撑结构和螺旋驱动张紧于油井的套管壁上,螺旋驱动机构在驱动电动机的带动作用下,沿套管内壁产生旋转运动,并沿套管内壁产生向上或向下驱动力,带动机器人作向上或向下运动,机器人的上、下移动方向是由电动机的转向来控制的,其移动速度由电机的转速来控制。控制电磁离合器电流的通断来实现对电火花解堵机构与螺旋驱动机构运动的控制,电磁离合器断电后,上下两轴固连,电机同时驱动螺旋移动机构和检测机构,机器人移动并实现小孔检测,发现小孔后,离合器通电,上下两轴脱离,螺旋移动机构运动停止,检测机构旋转一定角度,电火花解堵机构转到小孔位置进行解堵作业。支撑机构由在空间成120°分布的三个轮架组成,它有三个方面的功能:第一,轮子压紧管壁,防止电机外壳反向转动;第二,由三个轮架的张开和压缩来适应不同的管径,使它能够在一系列的生产套管中移动;第三,与螺旋驱动轮组相互配合,使整个机器人的轴线与生产套管的轴线保持重合,防止机器人偏斜。所设计的移动机构应达到以下基本要求:较大的承载能力、良好的低速运动平稳性、较好的柔性,可以顺利通过套管的变形和结垢段。此外,机器人在井下几千米、高温、高压、液态的恶劣环境下作业,设计结构要注意其结构的密封性,选用元器件要注意其耐高温、高压的能力以及控制的智能化。
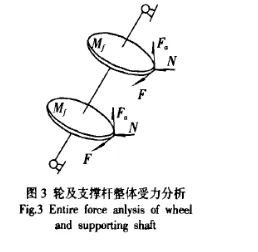
2.驱动轮及其支撑轴受力分析与计算 驱动轮及其支撑轴是本机器人上的重要元件,其强度和刚度等对机器人的运动特性有较大的影响,为了保证所设计结构的可靠性,应对其受力特性进行分析研究。在本机器人中各驱动轮子受力状况一致,因此,只要选取—个轮子进行受力分析即可。单个轮子的受力状况,如图2所示。

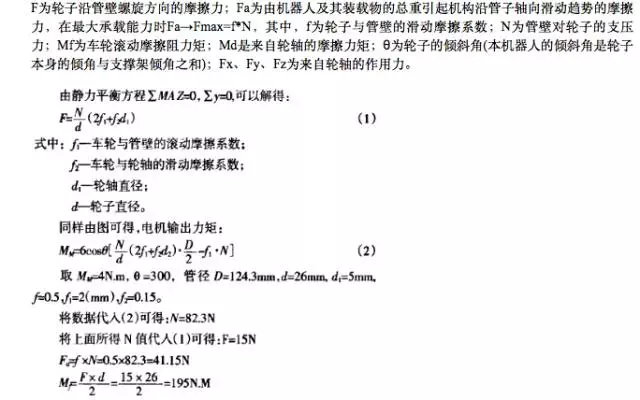
为进一步分析验证所设计驱动轮结构的可靠性及合理性,本文采用ANSYS软件对其热和力结合的耦合场分析研究,此处将轮子及其支撑杆作为一个整体进行受力分析,支撑杆的两端加只允许转动的约束,其受力及约束情况如图3所示。
3.轮及其支撑杆的ANSYS分析 采用ANSYS8.0对管道机器人轮腿部分结构进行分析。由于轮及其支撑杆结构较为简单,且用Pro/E建模便于构件几何尺寸上的优化设计和结构上的改进,所以,利用Pro/E创建模型.然后再导入有限元分析软件ANSYS中,进行网格划分。所划分的网格形式对计算精度及计算规模将产生直接影响,该结构较为简单,对整个模型利用Smartsize进行自由网格划分,经过网格划分
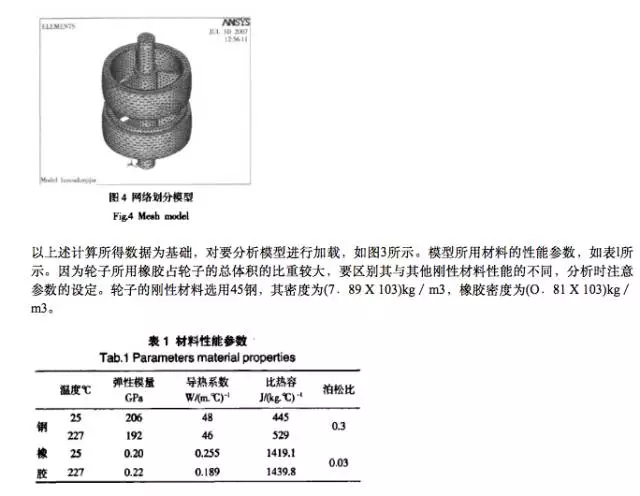
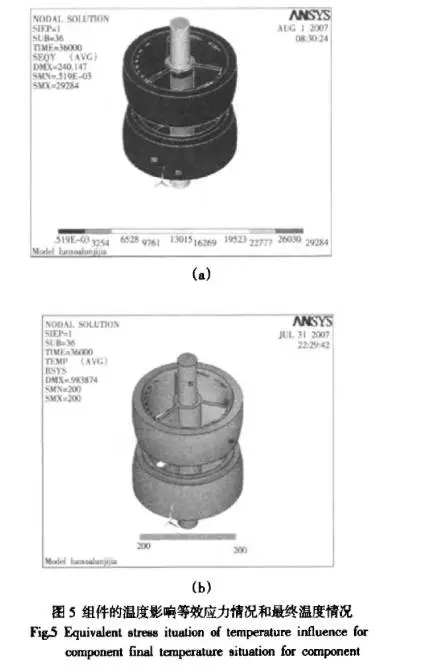
设机器人井下作业深度为2000 m,解堵油层厚度为3 rn。机器人连接到电缆低端,下放到解堵位置,在此过程中机器人与管壁不接触,温度渐变,取温度范围为(20一200)℃,以lO℃为分辨率对2000 m深度进行划分;机器人解堵过程,行程约为3 m,在这3 m作业行程内,温度变化很小,可忽略其温度变化,加载进行受力分析。整个作业过程约为10 h,分析组件的应力及温度情况。组件的等效应力及温度情况,如图5所示。 组件整体关于支撑杆的中间截面对称,且上下两部分处于相同的环境中,按照理论分析两对称部分受力要相同,图5所示结果与理论分析情况一致。由于支撑杆的两端有约束存在,受热膨胀时受到其他构件对其产生的反作用力,所以所受应力较大。组件属于微型结构,尺寸较小,受热易膨胀,而轮盘与支撑杆的各种参数存在差异,连接处的膨胀程度不同,此处杆件所受应力也较大。橡胶外圈与轮盘连接处由于橡胶的弹性性能好,受温度影响变化大。所以对轮盘的约束力较小。由图5(a)可知,最大应力为293 MPa小于钢的屈服极限355 MPa,可以满足工作要求。 组件下放过程受渐变温度场的作用,温度逐渐升高,开始解堵作业后受200℃恒定环境温度作用,使组件最终达到200 ℃,如图5(b)所示。钢的工作温度可达上千度,且如上面分析,钢所承受应力小于其应力屈服极限,满足工作要求。橡胶选用耐高温硅橡胶,其最高耐温可达400℃,比其它硅橡胶产品更耐温耐腐、粘接力强,弹性好,并且橡胶受热膨胀变形会增加轮子与管壁的接触压力,从而增加机器人移动时所需的摩擦力,更好的保证机器人运动的可靠性。
(1)该机器人采用螺旋结构把电机的旋转运动变为机器人的直线运动,具有结构简单、运动平稳等优点。 (2)采用该机器人可以较为方便的把电火花用的工具电极送入射孔炮眼进行放电解堵,解堵时无工作剂入井,避免了对储层造成的二次污染,高频的高温、高压作用在进行解堵的同时还具有一定的驱油效果。 (3)驱动轮及其支撑轴是本机器人上的重要元件,其强度和刚度等对机器人的运动特性有较大的影响,在设计时应予以足够的重视。
(4)机器人在井下工作时处在高温、高压和有一定腐蚀性的原油介质中,因此在机器人的设计中,除了注重外形设计外,还应注意其密封、耐温、耐压和耐腐蚀性能的提升。
来源:萝卜库
相关文章:
机器人驱动介绍
轮式机器人专题介绍
仿生机器人专题
履带机器人专题
轮腿复合型移动机器人
轮履腿复合移动机器人专题
第二版:
差点取代Linux的开源系统鼻祖386BSD沉寂22年后更新
微软Edge加快更新速度,期待跟上对手Chrome
苹果在中国申请iPhone双卡双待的专利
微软、雅虎双双布局梦幻足球智能机器人
柯达将在 10 月 20 日发布一款智能手机
第三版:
小E机器人介绍

