ABB机器人RAPID语言编程示例
【一】:系统介绍
中文手册:http://samwangpan01.club:8081/externalLinksController/chain/ABB%E6%9C%BA%E5%99%A8%E4%BA%BA%E4%B8%AD%E6%96%87%E6%89%8B%E5%86%8C.pdf?ckey=7GLNrf1%2BOQSWcq5sVS%2FgnB8vkb7KlFdiqF%2BhMQLd6YxkLw7tWFYKqFXOj3TRqlE5
RobotStudio6.08下载地址备份:
http://samwangpan01.club:8081/externalLinksController/chain/ABB%E6%9C%BA%E5%99%A8%E4%BA%BA%E8%BD%AF%E4%BB%B6RobotStudio_6.08.rar?ckey=UFYiQy57v1B0KlKgHhda9IUKbuLFwKn7%2FBdsOio1MxPVyWTSHhBjKN0KFvWJ1JBX
abb机器人简介(百度文库): https://wenku.baidu.com/view/845ae63a5afb770bf78a6529647d27284b733763.html?rec_flag=default&word=abb%E6%9C%BA%E5%99%A8%E4%BA%BA%E6%95%85%E9%9A%9C%E5%A4%84%E7%90%86&fr=pc_newview_relate-1001_1-2-wk_rec_doc2-1001_1-2-845ae63a5afb770bf78a6529647d27284b733763
S1: IRB6
S2: IRB60 IRB90
S3: IRB1500 IRB2000 IRB3000 IRB6000
S4: IRB1400 IRB2400 IRB4400 IRB6400
S4C: IRB1400 IRB2400 IRB4400 IRB5400 IRB6400
S4Cplus: IRB1400 IRB2400 IRB4400 IRB5400 IRB6600 IRB7600
IRC5: IRB1400 IRB2400 IRB4400 IRB5400 IRB6600 IRB7600
IRB1400 最大工作半径1444mm,最大承载5kg
IRB2400 最大工作半径1550-1810mm,最大承载5-16kg
IRB4400 最大工作半径1955-2745mm,最大承载10-60kg
IRB6400 最大工作半径2250-3000mm,最大承载75-200kg
IRB6400R 最大工作半径2469-2999mm,最大承载120-200kg
IRB6600/6650 最大工作半径2550-3200mm,最大承载125-225kg
IRB7600 最大工作半径2300-3500mm,最大承载150-500kg
IRB140 最大工作半径810mm,最大承载5kg
IRB640 四轴堆垛专用机器人,最大工作半径2905mm,最大承载160kg
IRB340 三轴或四轴分拣专用机器人,最大工作半径566mm,最大承载1kg
IRB840(0) 龙门架机械手工作范围很大,最大承载12000kg
IRB940 铸造行业专用机器人,垂直最大承载1300kg,水平承载350kg
IRB5400; IRB540; IRB5300; IRB500; IRB5600; IRB580; T10/F10 Trolley; T20 Trolley; T10/F20 Trolley 喷涂机器人,承载5-35kg,工作半径2813mm
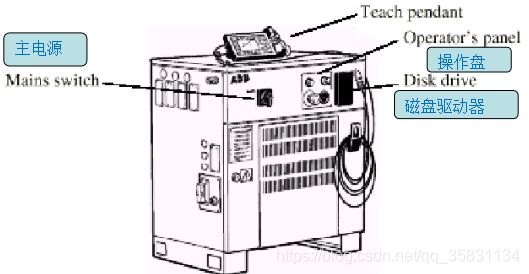
1.控制系统Controller

【二】:示教器功能介绍


2、窗口键:(Windowkeys)
Jogging -操纵窗口手动状态下,用来操纵机器人。显示屏上显示机器人相对位置及当前座标系。
rogram-编程窗口手动状态下,用来编程与测试。所有编程工作都在编程窗口中完成。
Input/Outputs-输入/输出窗口显示输入输出信号表与其数值。可手动给输出信号赋值。
Misc.-其他窗口:包括系统参数、服务、生产以及文件管理窗口。
3、导航键:(Navigationkeys)
List -切换键将光标在窗口的几个部分间切换。(通常由双实线分隔)
extPage-向下翻页键将光标向下快速移动。
reviousPage-向上翻页键将光标向上快速移动。
Uparrows-光标上移键将光标向上单步移动。
Downarrows-光标下移键将光标向下单步移动。
Leftarrows-光标左移键将光标向左单步移动。
Rightarrows-光标右移键将光标向左单步移动。
4、运动控制键:(Motionkeys)
MotionUnit-运动单元切换键手动状态下,操纵机器人本体与机器所控制的其他机械装置(外轴)之间的切换。
MotionType1-运动模式切换键1直线运动与姿态运动切换键。
直线运动是指机器人TCP沿座标系X、Y、Z轴方向作直线运动。
姿态运动是指机器人TCP在座标系中X、Y、Z轴数值不变,只沿着X、Y、Z轴旋转,改变姿态。
MotionType2-运动模式切换键2单轴运动选择键。
·第一组:1、2、3轴
·第二组:4、5、6轴
Incremental-点动操纵键
启动或关闭点动操纵功能,从而控制机器人手动运行时速度。
5、其他键:(Otherkeys)
top-停止键停止机器人程序运行。
Contrast-光亮键调节显示器对比度。
MenuKeys-菜单键显示下拉式菜单(热键),共有五个菜单键,显示包含各种命令的菜单。
Functionkeys-功能键直接选择功能(热键),共有五个功能键,直接选择各种命令。
Delete-删除键删除显示屏所选数据,机器人操作时,所要删除任何数据、文件、目录等,都用此键。
Enter-回车键进入光标所示数据。
6、自定义键:(Programmablekeys)
P1-P5这五个自定义键的功能可由程序员自定义,每个键可以控制一个模拟输入信号或一个输出信号以及其端口。
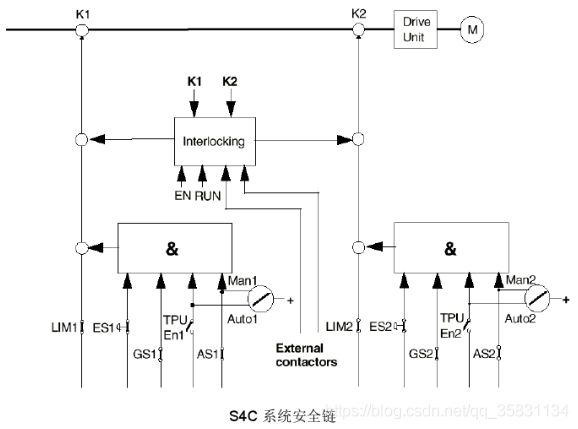
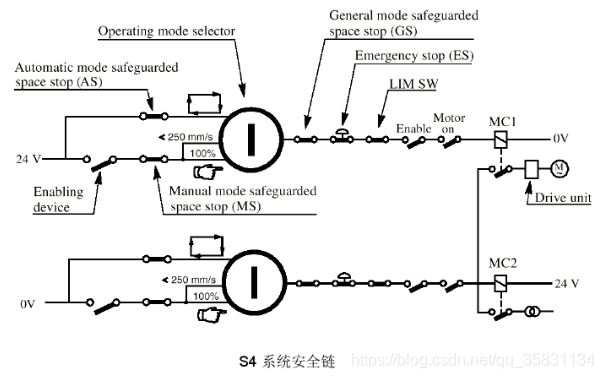
【三】:安全链(绝对禁止对安全链进行短接、定义或修改)
【四】:papid语言 基本指令介绍与示例
1.MovJ 关节运动:MoveL [\Conc,] ToPoint, Speed[\V]|[\t], Zone[\Z][\Inpos], Tool[\WObj];
2.MovL 线性运动:MoveL [\Conc,]ToPoint, Speed[\V]|[\T], Zone[\Z][\Inpos], Tool[\WObj][\Corr];

例1:画一个方形,每圈向外移动10
MODULE Module1
CONST robtarget p10:=[[931.61,46.87,1472.75],[0.768115,0.0441544,0.636333,0.0559423],[0,0,-1,0],[9E+09,9E+09,9E+09,9E+09,9E+09,9E+09]];
VAR num K:=0;
VAR num i:=0;
PROC main()
i := 0; !循环标志位,i=0
FOR i FROM 1 TO 5 DO !循环5圈
K := -i*10; !每圈向外10
MoveL offs(p10,k,0,-500),v500,fine,tool0; !xyz分别是k,0,-500;速度是500
MoveL offs(p10,K,400,-500),v500\V:=1000,z40\Z:=45,tool0;
MoveL offs(p10,K,400,150),v500,z40,tool0;
MoveL offs(p10,K,0,150),v500,z40,tool0;
MoveL offs(p10,K,0,-500),v500,z40,tool0;
ENDFOR
ENDPROC
ENDMODULE3.MovC 圆弧运动:MoveC[\Conc,] CirPoint, ToPoint, Speed[\V]|[\t], Zone[\Z][\Inpos], Tool[\WObj][\Corr];
[\Conc,]: 协作运动开关。(switch);
CirPoint:中间点,默认为*。(robotarget);
ToPoint:目标点,默认为*。(robotarget);
Speed:运行速度。(speeddata); [\V]:特殊运行速度mm/s。(num); [\T]运行时间控制。(num);
Zone:运行转角数据。(zonedata); [\Z]:特殊运行转角mm。(num); [\Inpos]:运行停止点数据。(stoppointdata);
Tool:工具中心点(TCP)。(tooldata);[\WObj]:工件坐标系。(wobjdata);[\Corr]:修正目标点开关。(switch);
例1:画一个圆
MODULE Module1
!CONST robtarget p10:=[[931.61,246.87,1472.75],[0.768115,0.0441544,0.636333,0.0559423],[0,0,-1,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
VAR num i:=0;
TASK PERS wobjdata wobjTable:=[FALSE,TRUE,"",[[0,0,0],[1,0,0,0]],[[0,0,0],[1,0,0,0]]];
TASK PERS tooldata tool1:=[TRUE,[[0,0,0],[1,0,0,0]],[-1,[0,0,0],[1,0,0,0],0,0,0]];
CONST robtarget p1:=[[931.61,567.83,1239.40],[0.768115,0.0441542,0.636333,0.055942],[0,0,-1,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
CONST robtarget p2:=[[931.61,-17.19,1476.60],[0.768115,0.0441543,0.636333,0.0559421],[-1,-1,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
CONST robtarget p3:=[[931.61,-506.46,1144.68],[0.768116,0.0441543,0.636333,0.0559421],[-1,-1,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
CONST robtarget p4:=[[931.61,80.26,875.84],[0.768115,0.0441544,0.636333,0.0559421],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
PROC main()
i := 0;
FOR i FROM 1 TO 5 DO
MoveL p1,v500,fine,tool0;
MoveC p2,p3,v500,z20,tool0;
MoveC p4,p1,v500,fine,tool0;
ENDFOR
ENDPROC
ENDMODULE
4.信号输出:机器人运动至目标点,并在目标点输出相应信号
MoveJDO ToPoint, Speed[\T], Zone, Tool[\WObj], Signal, Value;
MoveLDO ToPoint, Speed[\T], Zone, Tool[\WObj], Signal, Value;
MoveCDO CirPoint, ToPoint, Speed[\T], Zone, Tool[\WObj], Signal, Value;
Signal:数字输出信号名称。(signaldo);
Value:数字输出信号值。(dionum);
4.1.Reset OUT10; 信号输出0。 Set 信号输出1。
4.2.InvertDO OUT10; 信号反转。
例1:
PROC main()
IDelete intno1;
IDelete intno2;
CONNECT intno1 WITH MyExti1;
CONNECT intno2 WITH MyExti2;
ISignalDI IN10, 1, intno1;
ISignalDI IN20, 1, intno2;
WHILE TRUE DO
IF regint1=1 THEN
regint1:=regint1-1;
!InvertDO OUT10;
MoveL offs(p10,k,0,-500),v2000,fine,tool0;
MoveL offs(p10,K,400,-500),v2000\V:=1000,z40\Z:=45,tool0;
MoveL offs(p10,K,400,150),v2000,z40,tool0;
MoveL offs(p10,K,0,150),v2000,z40,tool0;
MoveLDO offs(p10,K,0,-500),v2000,z40,tool0,OUT10,1;
ELSEIF regint2=1 THEN
regint2:=regint2-1;
InvertDO OUT20;
MoveL p1,v2000,fine,tool0;
MoveC p2,p3,v2000,z20,tool0;
MoveC p4,p1,v2000,fine,tool0;
ELSE
Reset OUT10;
Reset OUT20;
ENDIF
ENDWHILE
ENDPROC
TRAP MyExti1
regint1:=regint1+1;
ENDTRAP
TRAP MyExti2
regint2:=regint2+1;
ENDTRAP5.调用相应例行程序指令:机器人运动至目标点,并在目标点调用相应例行程序
MoveJSync ToPoint, Speed[\T], Zone, Tool[\WObj], Proc;
MoveLSync ToPoint, Speed[\T], Zone, Tool[\WObj], Proc;
MoveCSync CirPoint, ToPoint, Speed[\T], Zone, Tool[\WObj], Proc;
CirPoint:中间点,默认为*。(robotarget);
ToPoint:目标点,默认为*。(robotarget);
Speed:运行速度。(speeddata); [\V]:特殊运行速度mm/s。(num); [\T]运行时间控制。(num);
Zone:运行转角数据。(zonedata); [\Z]:特殊运行转角mm。(num); [\Inpos]:运行停止点数据。(stoppointdata);
Tool:工具中心点(TCP)。(tooldata);[\WObj]:工件坐标系。(wobjdata);[\Corr]:修正目标点开关。(switch);
Proc:例行程序名称。(string);
用指令Stop停止当前指令运行,会出现一个错误信息,如需避免,采用指令StopInstr。
不能使用此指令来调用中断处理程序TRAP,不能但不执行此指令所调用的例行程序PROC。
6.MoveAbsJ 移动机械臂至绝对位置 MoveAbsJ [Conc,] ToJointPos[\NoEOffs], Speed[\V]|[\T], Zone[\Z][\Inpos], Tool[WObj];
MODULE Module1
VAR num i:=0;
CONST jointtarget p100:=[[37.6131,10.5047,7.03996,59.9717,-46.3082,-58.3159],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
CONST jointtarget p110:=[[-35.2865,8.06415,7.40231,-53.7255,-39.571,61.2511],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
CONST jointtarget p120:=[[-35.4623,27.1492,55.474,-32.0575,-76.4809,23.2391],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
CONST jointtarget p130:=[[50.0835,42.6387,47.1232,51.5741,-78.9401,-28.6567],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
CONST jointtarget p140:=[[-65.7798,-0.0497541,-8.7633,-76.5653,-61.5277,96.468],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
PROC main()
i := 0;
FOR i FROM 1 TO 500000 DO
MoveAbsJ p100, v2000, fine, tool0;
MoveAbsJ \Conc, p110\NoEOffs, v500, fine, tool0;
MoveAbsJ p120,v2000\V:=1000, z40\Z:=45, tool0;
MoveAbsJ p130,v2000, z40, tool0\WObj:=wobj0;
MoveAbsJ p140,v2000, fine\Inpos:=inpos50, tool0;
ENDFOR
ENDPROC
ENDMODULE
【五】:papid语言 其它指令使用
一:外轴指令
外轴激活ActUnit;外轴失效DeactUnit;
1.ActUnit m7dm1; 外轴激活。 2.DeactUnit m7dm1; 外轴失效(m7dm1是自己定义的外轴)
关于外部轴如何配置:https://blog.csdn.net/qq_35831134/article/details/106871946
例1:导轨移动,p100和p110是定义导轨移动的2个位置
PROC main()
IDelete intno1;
IDelete intno2;
CONNECT intno1 WITH MyExti1;
CONNECT intno2 WITH MyExti2;
ISignalDI IN10, 1, intno1;
ISignalDI IN20, 1, intno2;
WHILE TRUE DO
IF regint1=1 THEN
regint1:=regint1-1;
InvertDO OUT10;
ActUnit m7dm1;
MoveL p100,v2000,fine,tool0;
MoveL p110,v2000,fine,tool0;
DeactUnit m7dm1;
MoveL offs(p10,k,0,-500),v2000,fine,tool0;
MoveL offs(p10,K,400,-500),v2000\V:=1000,z40\Z:=45,tool0;
MoveL offs(p10,K,400,150),v2000,z40,tool0;
MoveL offs(p10,K,0,150),v2000,z40,tool0;
MoveL offs(p10,K,0,-500),v2000,z40,tool0;
ELSEIF regint2=1 THEN
regint2:=regint2-1;
InvertDO OUT20;
MoveL p1,v2000,fine,tool0;
MoveC p2,p3,v2000,z20,tool0;
MoveC p4,p1,v2000,fine,tool0;
ELSE
Reset OUT10;
Reset OUT20;
ENDIF
ENDWHILE
ENDPROC
TRAP MyExti1
regint1:=regint1+1;
ENDTRAP
TRAP MyExti2
regint2:=regint2+1;
ENDTRAP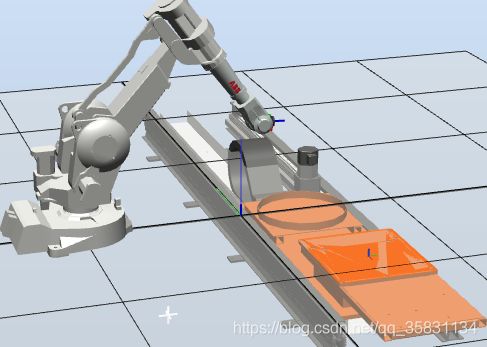

二:输入输出指令
如何配置IO板:https://blog.csdn.net/qq_35831134/article/details/107098972
对信号名称进行化名AliasIO;信号反转InvertDO; IO板失效IODisable;IO板激活IOEnable;脉冲信号PulseDO;信号为低电平Reset;高电平Set;模拟输出SetAO;组合延时输出SetDO;延时输出SetGO;等待输入信号满足相应值WaitDI;等待输出信号满足响应值WaitDO;
1. AliasIO config_do,alias_do;(config_do:在系统参数内定义,alias_do:在程序内定义)。
2. InvertDO OUT10; (OUT10:IO名称)。IODisable "cell",5;(cell:信号板名称,5:最长等待时间)。
3. IOEnable "cell",0;。
4. PulseDO\High\PLength do10;(High:输出脉冲时信号可以在高电平,PLength :脉冲长度,do10:IO名称)。
5. SetAO AO10,5;(AO10信号名称,5:值)。
6. SetDO\SDelay:=0.2,weld,high;(SDelay:延时s,weld:信号名称,high:值)。
7. SetGO\SDelay:=0.2,go_Type,10;(SDelay:延时s,Type:信号名称,10:值)。
8. WaitDI di_Ready,1;(等待输入信号为1才执行后面的指令)
9. WaitDI di_Ready,1\MaxTime:=5;(等待输入信号,5秒内无输入di_Ready为1,自动运行Error Handler处理,如果没有Error就报错)。
10. WaitDI di_Ready,1\MaxTime:=1\Timeflag:=bTimeout;(等待输入信号,1秒内无输入di_Ready为1,机器人执行后面指令,但此时TimeFlag的值为TRUE;如果在1秒内等到输入信号,TimeFlag的值为FALSE)。
11. WaitDO(与输入原理一样)。
三:停止指令
在当前指令行立即停止,运行指针停在下一行Break;停止运行并重置Exit;在当前指令行停止运行,指针停在下一行Stop;在当前指令行立即停止运行,当前循环结束,并从主程序第一行继续进行下一个循环ExitCycle;
四:计时指令
时钟复位ClkReset;时钟开始ClkStart;时钟停止ClkStop;
例1:计算出画一个圆所用的时间nCycleTime
ClkReset clock1;
ClkStart clock1;
MoveL p1,v2000,fine,tool0;
MoveC p2,p3,v2000,z20,tool0;
MoveC p4,p1,v2000,fine,tool0;
ClkStop clock;
nCycleTime:=ClkRead(clock1);
TPWrite "Last cycletime:"\Num:=nCycleTime;五:计数指令
加Add;清零Clear;加加Incr;减减Decr;
Add reg1,3;(等同于reg1:=reg1+3)。Clear reg1;(等同于reg1:=0)。Incr reg1(等同于reg1:=reg1+1)。Decr(相当于C语言里面-。-)
六:中断指令
CONNECT;IDelete;ISignalDI;ISignalDO;ISignalAI;ISignalAO;ISleep;IWatch;IDisable;IEnable;ITimer;
例1:IDelete外部中断,IN10和IN20来触发中断程序改变相应标志位 来执行死循环里面程序
PROC main()
IDelete intno1; !IDelete中断
CONNECT intno1 WITH MyExti1; !调用外部中断函数
ISignalDI IN10, 1, intno1; !外部中断所映射IO为IN10
WHILE TRUE DO !循环判断标志位状态
IF regint1=1 THEN !判断标志位状态
regint1:=regint1-1; !清除标志位
MoveL p1,v2000,fine,tool0;
MoveC p2,p3,v2000,z20,tool0;
MoveC p4,p1,v2000,fine,tool0;
ELSE
Reset OUT10;
ENDIF
ENDWHILE
ENDPROC
TRAP MyExti1 !定义的中断函数
regint1:=regint1+1; !改变标志位
ENDTRAP
MODULE Module1
CONST robtarget p10:=[[1203.52,0.00,1092.05],[0.676581,0.112147,0.72011,0.105368],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
CONST robtarget p1:=[[1196.82,-300.08,956.44],[0.676581,0.112147,0.72011,0.105368],[-1,-1,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
CONST robtarget p2:=[[1203.52,0.00,1092.05],[0.676581,0.112147,0.72011,0.105368],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
CONST robtarget p3:=[[1196.82,304.63,956.44],[0.676581,0.112147,0.72011,0.105368],[0,0,-1,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
CONST robtarget p4:=[[1196.82,0.00,750.21],[0.676581,0.112147,0.72011,0.105368],[0,0,0,0],[9E+9,9E+9,9E+9,9E+9,9E+9,9E+9]];
VAR num K:=0;
VAR num regint1:=0;
VAR num regint2:=0;
VAR intnum intno1:=0;
VAR intnum intno2:=0;
CONST robtarget p100:=[[1196.82,-300.08,956.44],[0.676581,0.112147,0.72011,0.105368],[-1,-1,0,0],[97.5137,9E+9,9E+9,9E+9,9E+9,9E+9]];
CONST robtarget p110:=[[1196.82,-300.08,956.44],[0.676581,0.112147,0.72011,0.105368],[-1,-1,0,0],[1828.95,9E+9,9E+9,9E+9,9E+9,9E+9]];
PROC main()
IDelete intno1;
IDelete intno2;
CONNECT intno1 WITH MyExti1;
CONNECT intno2 WITH MyExti2;
ISignalDI IN10, 1, intno1;
ISignalDI IN20, 1, intno2;
WHILE TRUE DO
IF regint1=1 THEN
regint1:=regint1-1;
InvertDO OUT10;
ActUnit m7dm1;
MoveL p100,v2000,fine,tool0;
MoveL p110,v2000,fine,tool0;
DeactUnit m7dm1;
MoveL offs(p10,k,0,-500),v2000,fine,tool0;
MoveL offs(p10,K,400,-500),v2000\V:=1000,z40\Z:=45,tool0;
MoveL offs(p10,K,400,150),v2000,z40,tool0;
MoveL offs(p10,K,0,150),v2000,z40,tool0;
MoveL offs(p10,K,0,-500),v2000,z40,tool0;
ELSEIF regint2=1 THEN
regint2:=regint2-1;
InvertDO OUT20;
MoveL p1,v2000,fine,tool0;
MoveC p2,p3,v2000,z20,tool0;
MoveC p4,p1,v2000,fine,tool0;
PulseDO\High\PLength:=1,OUT30;
ELSE
Reset OUT10;
Reset OUT20;
ENDIF
ENDWHILE
ENDPROC
TRAP MyExti1
regint1:=regint1+1;
ENDTRAP
TRAP MyExti2
regint2:=regint2+1;
ENDTRAP
ENDMODULE七:通信指令
清屏TPErase;显示字符串TPWrite;字符串和按钮TPReadFK;TPReadNum;ErrWrite;TPShow;
1.TPWrite String[\Num][\Bool][\Pos][\Orient];
String:字符串(string);[\NUm]:"123"(num);[\bool]:"TRUE"(bool);[\Pos]:显示位置xyz"[21f,52,72]"(pos);[\Orient]:显示方位q1q2q3q4"[0.5,3,5,0]"(orient)。
例1:TPWrite "Cycle Time="\Num:=nTIme; (Num是字符串类型 var Num nTIme:=12;)。
例2:TPWrite "xyz="\Pos:=xyz; (Pos坐标 var Pos xyz:=[10,20,30];)。
2.TPReadFK Answer,Text,FK1,FK2,FK3,FK4,FK5,[\MaxTime],[\DIBreak][\BreakFlag];
Answer:数字赋值1-5(num);Text:屏幕字符串(string);FKx:功能键字符串(string);[\MaxTime]:最长等待时间(num);[\DIBreak]:输入信号控制(signaldi);[\BreakFlag]:指令状态控制(errnum);
例1:TPReadFK reg5,"more?",stEmpty,"yes","no","Button1","Button2";
3.TPReadNum
4.ErrWrite [\W],Header,Reason[\RL2][\RL3][RL4];
[\W]:事件记录开关(switch);Header:错误信息标题(string);Reason:错误信息原因(string);[\RL2];[\RL3];[\RL4]:附加错误信息原因(string);
例1:ErrWrite\w,"Search error","NO hit for the first search";
例2:ErrWrite\w,"PLC error","Fatal error in PLC"\RL2:="Call service";
八:程序流程指令
循环FOR;等待输入条件判断WaitUntil;延时WaitTime;Compact IF;条件判断 IF;TEST;死循环 WHILE;无条件转移(跳转)指令GOTO;定义变量或标号的类型Lable;调用子程序procCall; 跳出程序到上一级return;
1.1. FOR循环,循环5次
i:=0;
FOR i FROM 1 TO 5 DO
MoveL p1,v2000,fine,tool0;
MoveL p1,v2000,fine,tool0;
ENDWHILE1.2.FOR示例:
VAR c:=0;
PROC main()
FOR i FROM 1 TO 2 DO
FOR j FROM 1 TO 2 DO
c:=i*j;
TPWrite "Cycle Time="\Num:=c;
ENDFOR
ENDFOR
ENDPROC2. WaitUntil [\InPos],Cond[\MaxTime][\TimeFlag];
[\InPos]:提前量开关(switch);Cond:判断条件(bool);[\MaxTime]:等待时间s(num);[\TimeFlag]:超时逻辑量(bool);
例1:WaitUntil IN10=1\MaxTime:=5; !如果5秒内IN10不输入1就运行Error Handler,如果没用Error的话就报错
例2:WaitUntil bOK=TRUE\MaxTime:=1\TimeFlag:=bTimeOut;
3.WHILE指令示例,循环5次
reg1:=0;
reg2:=5;
WHILE reg1九、运动控制指令
机器人加速度AccSet;对机器人速度限制VelSet;关节运动,轴配置数据ConfJ;直线运动,轴配置数据ConfL; 避免机器人运行时死机(位置得不到控制,建议不要使用)SingArea;PathResol;软化机器人主机或外轴伺服系统SoftAct; 软化失效SoftDeact;
1. AccSet Acc,Ramp;
Acc:机器人加速度百分率(num);Ramp:机器人加速度坡度(num);
例1:AccSet 50,80; 处理脆弱负载时,使用了AccSet,可允许更低的加速度和减速度,使得机械臂的移动更加顺畅
2.VelSet Override,Max;
Override:机器人运行速率%(num);Max:最大运行速度mm/s(num);
例:VelSet 80,700; 编程速率设定。VelSet 用于增加或减少后续定位指令的编程速率,直至执行新的VelSet 指令
3.ConfJ [\On]|[\Off];
[\On]:启动轴配置数据(switch);关节运动时,机器人移动至绝对ModPos点,如果无法到达,程序将停止运行;
[\Off]:默认轴配置数据(switch);关节运动时,机器人移动至ModPos点,轴配置数据默认为当前最接近值;
例1:ConfiJ\On;
4.ConfL [\On]|[\Off];
5.SingArea[\Wrist]|[\Off];
[\Wrist]: 启用位置方位调整(switch);[\Off]: 关闭位置方位调整(switch);
6.PathResol PathSampleTime;
PathSampleTime: 路径控制%(num);
机器人必须在完全停止后才能更改路径控制值,否则机器人将默认一个停止点,显示错误信息50146。
例1:PathResol 150;
7.SoftAct[\MechUnit,] Axis,Softness [\Ramp];
[\MechUnit]:软化外轴名称(mecunit); Axis: 软化轴号码(num);Softness: 软化值%(num);[\Ramp]: 软化坡度%(num);
软化机器人主机或外轴伺服系统,范围0-100%,坡度范围>=100%, 与SoftDeact指令同时使用。
8. SoftDeact[\Ramp];
[\Ramp]: 软化坡度,>=100%(num);
例1:
SoftAct 5,30;
SoftDeact;
SoftAct 1,90;
SoftDeact \Ramp:=100;