【详细讲解 附全部代码】【openmv控制三自由度机械臂抓取物品】硬件+软件
前言:
这份代码很难得的是纯自己写的,虽然openmv梯子都搭成这样了也没什么大技术含量,只有一丢丢细小的逻辑。。
整体代码放在最后了,有需要的自取吧
实现功能
机械臂抓取一定范围内任意位置的物品,将其放到指定位置
物品以形状和颜色区分
硬件清单
1.openmv 以及数据线
2.电源,可以使用充电宝替代
3.机械臂一份,在淘宝十几块钱就可以买到
4.小舵机3个,长的没问题就可以不需要太纠结型号
5.杜邦线 之类的零件若干
6.抓取的物品若干,由于便宜的机械臂摩擦力不够,可能需要稍微处理一下
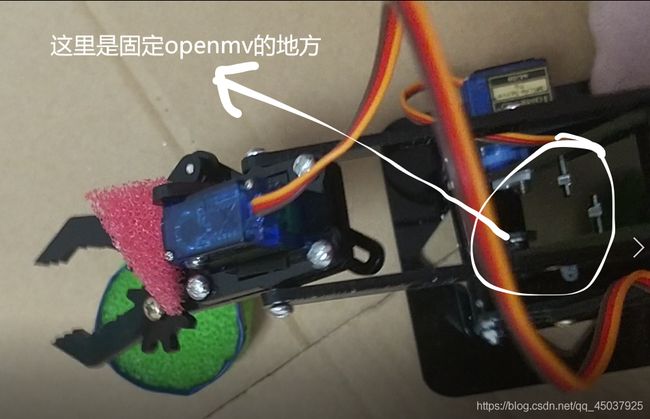
7.随便什么可以把openmv固定起来的杆,我使用的是硬纸壳粘在一起,使用起来没问题,你也可以尝试雪糕棒一类的东西
实物图
原谅我没好好拍图片。。只能在视频里面截取一下了

整体程序设计思路
识别部分
由于需要同时识别形状和颜色,我的第一反应当然是星瞳上面找例程啦!官方确实有一个同时识别形状和颜色的例程.
但是!
经过我自己试验发现,关于形状的判断十分不准确,尤其我使用的海绵块本身边界不是那么的平整。。就导致 根!本!用!不!了!
当然这种小问题难不倒我啦,官方的程序思路是先识别形状,然后使用“class Statistics – 统计数据对象”判断。
官方代码如下:
img = sensor.snapshot().lens_corr(1.8)
for c in img.find_circles(threshold = 3500, x_margin = 10, y_margin = 10, r_margin = 10,
r_min = 2, r_max = 100, r_step = 2):
area = (c.x()-c.r(), c.y()-c.r(), 2*c.r(), 2*c.r())
#area为识别到的圆的区域,即圆的外接矩形框
statistics = img.get_statistics(roi=area)#像素颜色统计
print(statistics)
#(0,100,0,120,0,120)是红色的阈值,所以当区域内的众数(也就是最多的颜色),范围在这个阈值内,就说明是红色的圆。
#l_mode(),a_mode(),b_mode()是L通道,A通道,B通道的众数。
if 0<statistics.l_mode()<100 and 0<statistics.a_mode()<127 and 0<statistics.b_mode()<127:#if the circle is red
img.draw_circle(c.x(), c.y(), c.r(), color = (255, 0, 0))#识别到的红色圆形用红色的圆框出来
else:
img.draw_rectangle(area, color = (255, 255, 255))
#将非红色的圆用白色的矩形框出来但是既然形状识别没有颜色识别靠谱。那咱们就改成先识别颜色再判断形状不就好啦?
另外在这里我加入了一个变量记录区域被识别为圆还是方的次数,如果你需要考虑更多形状可以改成数组的形式储存次数。
我的代码:
blobs = img.find_blobs([yellow_threshold,green_threshold], roi=(0,0,160,80),pixels_threshold=100, area_threshold=100)# merge=True, margin=10
if blobs:#如果找到了
data=[]#初始化数据
blob=find_max(blobs)#找最大
color=blob.code()#记录颜色
img.draw_rectangle(blob.x(),blob.y(),blob.w(),blob.h(), color = (255, 255, 255), thickness = 2, fill = False)
#在色块周边一定范围内找圆
circles= img.find_circles(threshold = 2600,r_min=10, x_margin = 10, y_margin = 10, r_margin = 10,
r_min = 2, r_max = 100, r_step = 2,roi=(blob.x(),blob.y(),blob.w(),blob.h()))
#在色块周边一定范围内找方
rects = img.find_rects(threshold = 10000,roi=(blob.x(),blob.y(),blob.w(),blob.h()))
if circles:
shape=shape+1
if rects:
shape=shape-1
#上面两句会在一次抓取任务中对shape进行运算,shape表示该物品形状是圆还是方的概率,因此值理论上是-无穷到+无穷,实际不会太大,
#正数表示更可能为圆,负数表示更可能为方,绝对值越大可能性越高,可以把中间值改成其他值以更好地提高准确率
#由于openmv不能每一次都准确识别,因此采用这种方式显著提高了准确率。硬件连接设计
我这里只用了3个舵机
openmv2有2个舵机控制引脚
openmv3有3个舵机控制引脚
可以通过连接pca9685连接更多舵机,不需要担心引脚不够用
顺便一提!openmv接屏幕 串口 舵机 等等外设多的时候特别容易引脚冲突!强烈建议买个pca9685备用,tb买单独的模块就行,比官方扩展板便宜很多,用法都一样两三句代码的事。
我的代码接引脚是这样的(没有使用扩展板):
s1 = Servo(1) # P7
s2 = Servo(2) # P8
s3 = Servo(3) # P9 Only for OpenMV3 M7
#实例化3个舵机运动控制
万能pid,我觉得不用多说了,我只用了一个p
注意的是我把运动拆解成了拿取之前的运动和拿取之后的运动,因为拿取之后的运动基本固定的,只要判断几个参数就行。
以下是拿取之前的运动:
def move(s3_error,s2_error):#定义一个函数,作用是运动到目标物体位置
kp=0.2
global s2_now
global s3_now #global关键字 用于全局变量
s3_move = s3_error*kp+s3_now#pid计算
if s3_move > 90:#这4句限制舵机运动角度,防止卡死
s3_move = 90
if s3_move < -90:
s3_move = -90
s3.angle(s3_move)#这一句是输出pwm控制舵机,采用openmv控制舵机时需要,采用arduino时不需要
s3_now = s3_move#更新当前舵机角度存档
if abs(s3_error)<10:
s2_move = s2_error*kp+s2_now#pid计算
if s2_move > -20:#这4句限制舵机运动角度,防止卡死
s2_move = -20
if s2_move < -90:
s2_move = -90
s2.angle(s2_move)#这一句是输出pwm控制舵机,采用openmv控制舵机时需要,采用arduino时不需要
s2_now = s2_move拿取之后的运动我基本就是for循环加延时,
判断应该放到哪里的代码如下:
angle = 0#这个值表示目的角度
if color == 1:#根据颜色判断
angle = 90
else :
angle = -90
if shape > 0:#根据形状判断
if angle >0:
angle = angle - 30
else:
angle = angle + 30需要注意的是:
for循环设计上要考虑到目标位置与循环条件的关系!
解决办法是写2个循环就可以了,每次只会执行符合的哪一个
不多说,直接看代码就理解了:
for i in range(s2_now,-20,-1):
s2.angle(i)
time.sleep(20)
for i in range(s2_now,-20):
s2.angle(i)
time.sleep(20)关于机械臂硬件
我在淘宝买的4自由度机械臂,强行改成3自由度
如果你是4自由度,单独控制一下第四个舵机就行,差别不大,方法都一样的。
如何get同款硬件?
1.购买一个特别便宜的长得差不多就对了的机械臂 什么颜色都可以
2.其他部分正常组装,只有控制高度的舵机不装
3.使用一根剩下来的杆子固定高度
4.差不多就完工了!具体堆栈我的图片就可以,这东西只要运动没问题就行。
关于整体代码
# 设计:沈阳航空航天大学 berry
# 博客:https://blog.csdn.net/qq_45037925/article/details/105901893
# 交流方式:私信我的博客即可
import time
from pyb import Servo
import sensor, image, time
from pyb import UART
#导入需要的模块
s1 = Servo(1) # P7
s2 = Servo(2) # P8
s3 = Servo(3) # P9 Only for OpenMV3 M7
#实例化3个舵机
uart = UART(3, 115200)#初始化串口
s2_now = -90
s3_now = 0
red_threshold = (21, 100, 36, 127, -9, 34)#颜色阈值1 0001(14, 100, 8, 127, 9, 116)
blue_threshold = ((20, 67, -52, -13, -36, -1))#颜色阈值2 0010
yellow_threshold = (14, 100, 22, 127, 42, 113)#颜色阈值4 0100
green_threshold = (20, 100, -128, -24, 17, 127)#颜色阈值8 1000
sensor.reset() # Initialize the camera sensor.
sensor.set_pixformat(sensor.RGB565) # use RGB565.
sensor.set_framesize(sensor.QQVGA) # use QQVGA for speed.
sensor.skip_frames(10) # Let new settings take affect.
sensor.set_auto_gain(False) # must be turned off for color tracking
sensor.set_auto_whitebal(False) # turn this off.
clock = time.clock() # Tracks FPS.
#以上部分是每个程序差不多都有的初始化设定
def move(s3_error,s2_error):#定义一个函数,作用是运动到目标物体位置
kp=0.2
global s2_now
global s3_now #global关键字 用于全局变量
s3_move = s3_error*kp+s3_now#pid计算
if s3_move > 90:#这4句限制舵机运动角度,防止卡死
s3_move = 90
if s3_move < -90:
s3_move = -90
s3.angle(s3_move)#这一句是输出pwm控制舵机,采用openmv控制舵机时需要,采用arduino时不需要
s3_now = s3_move#更新当前舵机角度存档
if abs(s3_error)<10:
s2_move = s2_error*kp+s2_now#pid计算
if s2_move > -20:#这4句限制舵机运动角度,防止卡死
s2_move = -20
if s2_move < -90:
s2_move = -90
s2.angle(s2_move)#这一句是输出pwm控制舵机,采用openmv控制舵机时需要,采用arduino时不需要
s2_now = s2_move
#data.append((s2_now,s3_now))#这三句时串口输出舵机应转的角度,采用openmv控制舵机时不需要,采用arduino时需要
#data_out = json.dumps(set(data))
#uart.write(data_out +'\n')
def lay(shape,color):#定义一个函数,用于把抓取的物品放到指定位置
global s2_now#global关键字 用于全局变量
global s3_now
angle = 0#这个值表示目的角度
if color == 1:#根据颜色判断
angle = 90
else :
angle = -90
if shape > 0:#根据形状判断
if angle >0:
angle = angle - 30
else:
angle = angle + 30
#下面是机械臂把物品放到指定angle对应位置,并回到初始位置
for i in range(s2_now,-20,-1):
s2.angle(i)
time.sleep(20)
for i in range(s2_now,-20):
s2.angle(i)
time.sleep(20)
for i in range(5,-19,-1):
s1.angle(i)
time.sleep(10)
for i in range(-20,-90,-1):
s2.angle(i)
time.sleep(20)
for i in range(s3_now,angle,-1):
s3.angle(i)
time.sleep(20)
for i in range(s3_now,angle):
s3.angle(i)
time.sleep(20)
for i in range(-90,-40):
s2.angle(i)
time.sleep(20)
for i in range(-10,5):
s1.angle(i)
time.sleep(10)
time.sleep(200)
#data.append((s2_now,s3_now))
#data_out = json.dumps(set(data))
#uart.write(data_out +'\n')
for i in range(-20,-90,-1):
s2.angle(i)
time.sleep(20)
for i in range(angle,0,-1):
s3.angle(i)
time.sleep(20)
for i in range(angle,0):
s3.angle(i)
time.sleep(20)
time.sleep(2000)
s2.angle(-90)
s2_now = -90
s3_now = angle
#data.append((s2_now,s3_now))
#data_out = json.dumps(set(data))
#uart.write(data_out +'\n')
def find_max(blobs):#定义一个找最大色块的函数,输入一个色块对象列表,输出一个色块对象
max_size=0
for blob in blobs:
if blob[2]*blob[3] > max_size:
max_blob=blob
max_size = blob[2]*blob[3]
return max_blob
def find_max_c(blobs):#定义一个找最大圆的函数,输入一个圆对象列表,输出一个圆对象
max_size=0
for blob in blobs:
if blob[2] > max_size:
max_blob=blob
max_size = blob[2]
return max_blob
s3.angle(s3_now)#初始化舵机
s2.angle(s2_now)
shape=0#记录形状和颜色
color=0
time.sleep(2000)
#下面是循环执行的部分
while(True):
clock.tick() # Track elapsed milliseconds between snapshots().
img = sensor.snapshot().lens_corr(1.8)#拍摄一张照片,并畸变矫正
claps = img.find_blobs([red_threshold])#寻找色块
if claps:
clap=find_max(claps)
img.draw_cross(clap.x(), clap.y(), color = (0, 255, 0), size = 10, thickness = 2)#画一个十字
#寻找色块
blobs = img.find_blobs([yellow_threshold,green_threshold], roi=(0,0,160,80),pixels_threshold=100, area_threshold=100)# merge=True, margin=10
if blobs:#如果找到了
data=[]#初始化数据
blob=find_max(blobs)#找最大
color=blob.code()#记录颜色
img.draw_rectangle(blob.x(),blob.y(),blob.w(),blob.h(), color = (255, 255, 255), thickness = 2, fill = False)
#在色块周边一定范围内找圆
circles= img.find_circles(threshold = 2600,r_min=10, x_margin = 10, y_margin = 10, r_margin = 10,
r_min = 2, r_max = 100, r_step = 2,roi=(blob.x(),blob.y(),blob.w(),blob.h()))
#在色块周边一定范围内找方
rects = img.find_rects(threshold = 10000,roi=(blob.x(),blob.y(),blob.w(),blob.h()))
if circles:
shape=shape+1
if rects:
shape=shape-1
#上面两句会在一次抓取任务中对shape进行运算,shape表示该物品形状是圆还是方的概率,因此值理论上是-无穷到+无穷,实际不会太大,
#正数表示更可能为圆,负数表示更可能为方,绝对值越大可能性越高,可以把中间值改成其他值以更好地提高准确率
#由于openmv不能每一次都准确识别,因此采用这种方式显著提高了准确率。
tx=blob.cx()
ty=blob.cy()
#s3_error = clap.cx()-tx#计算error
#s2_error = clap.cy()-ty
s3_error = 78-tx#计算error
s2_error = 44-ty
move(s3_error,s2_error)#使用前面定义的函数
if abs(s3_error)<10:
lay(shape,color)#使用前面定义的函数
shape=0#清除标志
color=0
#s1.angle(5)打开#s1.angle(-10)闭合
#s2.angle(-90)#前s2.angle(-20)后
#s3.angle(-90)#左 s3.angle(0)#中s3.angle(90)#右
后话
这个程序其实有一个不完美的地方,就是。。它不会主动判断夹取是否成功,没写的原因是我懒。。
简单写一下我的思路吧,
思路:
1.在原来程序基础上,在夹取完成之后每xx时间(可以使用定时器也可以穿插在之后的程序中)检测一下屏幕中间一定区域的颜色,如果不符合预期就重新寻找一次色块,如果发现色块就重新回去取色块
2.使用帧差分啥的不知道行不行