CC2530基础实验四 串口通信
一、任务要求
编写程序实现实验板定期向PC机串口发送字符串“Hello ! I am CC2530 。\n”。实验板开机后按照设定的时间间隔,不断地向PC及发送字符串,报告自己的状态,每发送一次字符串消息,LED1闪亮一次。具体工作方式如下:
① 通电后LED1熄灭。
② 设置USART 0使用位置。
③ 设置UART工作方式和波特率。
④ LED1点亮。
⑤ 发送字符串“Hello ! I am CC2530。\n”。
⑥ LED1熄灭。
⑦ 延时一段时间,延时时间可以设置为3秒。
⑧ 返回步骤④循环执行。
串口通信介绍
数据通信时,根据CPU与外设之间的连线结构和数据传送方式的不同,可以将通信方式分为两种:并行通信和串行通信。
并行通信是指数据的各位同时发送或接收,每个数据位使用单独的一条导线,有多少位数据需要传送就需要有多少条数据线。并行通信的特点是各位数据同时传送,传送速度快效率高,并行数据传送需要较多的数据线,因此传送成本高,干扰大,可靠性较差,一般适用于短距离数据通信,多用于计算机内部的数据传送方式。
串行通信是指数据一位接一位顺序发送或接收。串行通信的特点是数据按位顺序进行,最少只需一根数据传输线即可完成,传输成本低传送数据速度慢,一般用于较长距离的数据传送。
串行通信又分同步和异步两种方式。
(1)串行同步通信
同步通信中,所有设备使用同一个时钟,以数据块为单位传送数据,每个数据块包括同步字符、数据块和校验字符。同步字符位于数据块的开头,用于确认数据字符的开始;接收时,接收设备连续不断地对传输线采样,并把接收到的字符与双方约定的同步字符进行比较,只有比较成功后才会把后面接收到的字符加以存储
同步通信的优点是数据传输速率高,缺点是要求发送时钟和接收时钟保持严格同步。在数据传送开始时先用同步字符来指示,同时传送时钟信号来实现发送端和接收端同步,即检测到规定的同步字符后,接着就连续按顺序传送数据。这种传送方式对硬件结构要求较高。(2)串行异步通信
异步通信中,每个设备都有自己的时钟信号,通信中双方的时钟频率保持一致。异步通信以字符为单位进行数据传送,每一个字符均按照固定的格式传送,又被称为帧,即异步串行通信一次传送一个帧。
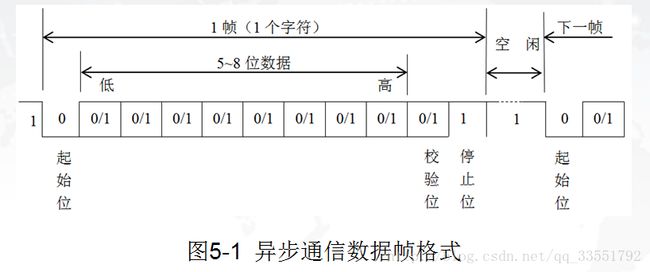
每一帧数据由起始位(低电平)、数据位、奇偶校验位(可选)、停止位(高电平)组成。帧的格式如图5-1所示:

起始位:发送端通过发送起始位而开始一帧数据的传送。起始位使数据线处于逻辑0,用来表示一帧数据的开始。
数据位:起始位之后就开始传送数据位。在数据位中,低位在前,高位在后。数据的位数可以是5、6、7或者8。
奇偶校验位:是可选项,双方根据约定用来对传送数据的正确性进行检查。可选用奇校验、偶校验和无校验位。
停止位:在奇偶检验位之后,停止位使数据线处于逻辑1,用以标志一个数据帧的结束。停止位逻辑值1的保持时间可以是1、1.5或2位,通信双方根据需要确定。
空闲位:在一帧数据的停止位之后,线路处于空闲状态,可以是很多位,线路上对应的逻辑值是1,表示一帧数据结束,下一帧数据还没有到来。
2.CC2530的串口通信模块
CC2530有两个串行通信接口USART 0和USART 1,它们能够分别运行于异步UART模式或者同步SPI模式。两个USART具有同样的功能,可以设置在单独的I/O引脚,如表5-1所示
根据映射表可知,在UART模式中,使用双线连接方式,UART 0和UART 1对应的外部设置I/O引脚关系分别为:
位置1:RX0----P0_2 TX0----P0_3 P0_5----RX1 TX1----P0_4
位置2:RX0----P1_4 TX0----P1_5 P1_7----RX1 TX1----P1_6
UART模式的操作具有下列特点:
8位或者9位有效数据
奇校验、偶校验或者无奇偶校验
配置起始位和停止位电平
配置LSB或者MSB首先传送
独立收发中断
独立收发DMA触发
奇偶校验和数据帧错误状态指示
UART模式提供全双工传送,接收器中的位同步不影响发送功能。传送一个UART字节包含1个起始位、8个数据位、1个作为可选项的第9位数据或者奇偶校验位再加上1个或2个停止位。实际发送的帧包含8位或者9位,但是数据传送只涉及一个字节。
3.CC2530串口通信的相关寄存器
对于CC2530的每个USART串口通信,有5个如下的寄存器(x是USART的编号,为0或者1):
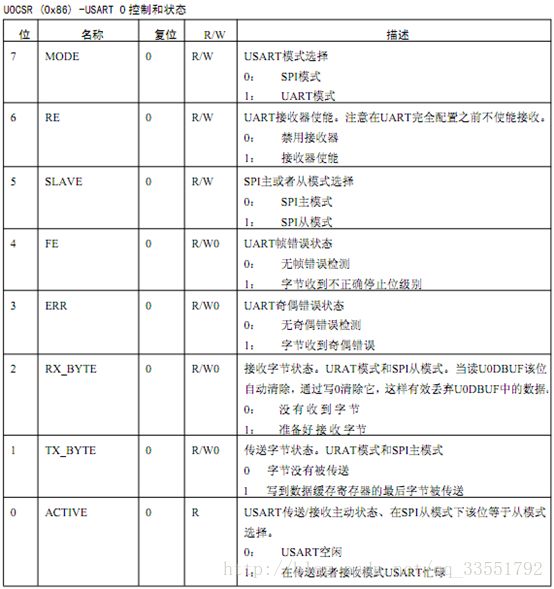
UxCSR:USARTx控制和状态寄存器
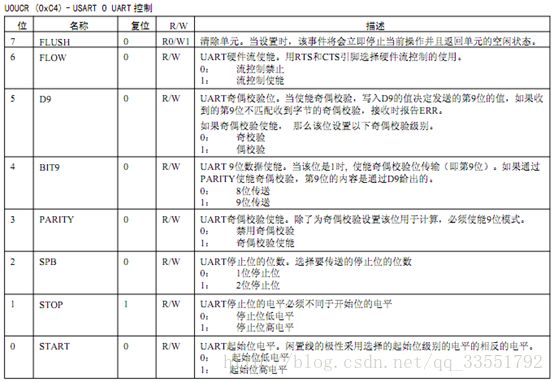
UxUCR:USARTx UART控制寄存器
UxGCR:USARTx 通用控制寄存器
UxBUF:USART x接收/发送数据缓冲寄存器
UxBAUD:USART x波特率控制寄存器
4.串口0初始化
串口0 初始化
PERCFG=0X00; //外设控制寄存器 这里使用串口0位置1
P0SEL=0X0C; //0_2 0_3设置特殊端口
U0CSR |=0X80;//0100 0000 0x80 串口通信的语言这里使用USART
U0BAUD =216 ;
U0GCR=10 ; //波特率
U0UCR |=0x80; //流控制禁止
U0CSR |=0x40; //允许接受数据
UTX0IF = 0; //接受标志位
URX0IF = 0; //发送标志位
URX0IE=1; //使能中断
EA=1; //中断总开关
串口设置
TX 发送数据
RX 接收数据

波特率设置

U0CSR和U0BAUD用来设置波特率
例如设置波特率位57600:
U0BAUD = 216;
U0GCR = 10;
具体初始化
UART0初始化配置
1、设置USARTX0 为备用位置1,一般采用上电默认,无需配置
PERCFG &= ~0X01;
2、设置P0用作串口,P0_2、P0_3作为片上外设I/0
P0SEL |= 0X0C;
3、设置P0口外设优先级,采用上电默认值(P2DIR),无需配置
4、设置UART0波特率
U0BAUD = 59;
U0GCR = 10;
5、USART 模式选择,UART 模式,允许接收
U0CSR |= 0XC0;
6、进行USART 清除,并设置数据格式为默认值
U0UCR |= 0X80;
7、清零UART0 RX 和 UART0 TX 中断标志
URX0IF = 0;
UTX0IF = 0;
8、使能UART0 RX 中断
URX0IE = 1;
9、使能全局中断
EA = 1;
如果接收到了串口发来的数据URX0IF置1;
如果发送成功UTX0IF置1;
串口收发配置
1、串口初始化配置
2、发送函数
void SendString(char *p) //发送字符串
{
while(1)
{
if(*p == '\0')
break;
U0DBUF = *p++;
while(!UTX0IF);
UTX0IF = 0;
}
}
3、串口接收中断服务函数
#pragma vector = URX0_VECTOR
__interrupt void URX0_f()
{
URX0IF = 0;
buff[i] = U0DBUF;
if(buff[i] == '#')
{
TXstring(buff);
i = 0;
}
else
i++;
}
4、main函数及时钟源的配置
void main()
{
CLKCONCMD &= ~0X47;
initUART0();
while(1);
}
U0CSR
USART模式选择
开启/关闭 接收数据功能,在发送数据的时候需要关闭接收数据功能
U0CSR |= 0X40; / U0CSR &= ~0X40;

U0UCR
一般采用上电默认值
U0UCR |= 0X80;
URX0IF
清空UART0、UART1的RX 中断标志
URX0IF = 0;

UTX0IF

U0CSR
一般设置:
U0CSR |= 0X40; //允许接收
URX0IE
IEN0 的第二位,使能UART0 RX 中断

P2DIR
端口0外设优先级控制
使用USART0时 采用上电默认值

代码
/* 文件名称:uart1.c
* 功 能:CC2530系统实验-----单片机串口发送数据到PC
* 描 述:实现从 CC2530 上通过串口每3秒发送字串"Hello ,I am CC2530 .\n ",在PC端实验串口助手来接收数据。使用 CC2530 的串口 UART 0 ,波特率为 57600,其他参数为上电复位默认值。
*/
/* 包含头文件 */
#include "ioCC2530.h" //定义led灯端口
#define LED1 P1_0 // P1_0定义为P1.0
unsigned int counter=0; //统计定时器溢出次数
void initUART0(void)
{
PERCFG = 0x00;
P0SEL = 0x3c;
U0CSR |= 0x80;
U0BAUD = 216;
U0GCR = 10;
U0UCR |= 0x80;
UTX0IF = 0; // 清零UART0 TX中断标志
EA = 1; //使能全局中断
}
/************************************************************
* 函数名称:inittTimer1
* 功 能:初始化定时器T1控制状态寄存器
*************************************************************/
void inittTimer1()
{
CLKCONCMD &= 0x80; //时钟速度设置为32MHz
T1CTL = 0x0E; // 配置128分频,模比较计数工作模式,并开始启动
T1CCTL0 |= 0x04; //设定timer1通道0比较模式
T1CC0L =50000 & 0xFF; // 把50000的低8位写入T1CC0L
T1CC0H = ((50000 & 0xFF00) >> 8); // 把50000的高8位写入T1CC0H
T1IF=0; //清除timer1中断标志
T1STAT &= ~0x01; //清除通道0中断标志
TIMIF &= ~0x40; //不产生定时器1的溢出中断
//定时器1的通道0的中断使能T1CCTL0.IM默认使能
IEN1 |= 0x02; //使能定时器1的中断
EA = 1; //使能全局中断
}
void UART0SendByte(unsigned char c)
{
U0DBUF = c;
while (!UTX0IF); // 等待TX中断标志,即U0DBUF就绪
UTX0IF = 0; // 清零TX中断标志
}
/**************************************************************
* 函数名称:UART0SendString
* 功 能:UART0发送一个字符串
**************************************************************/
void UART0SendString(unsigned char *str)
{
while(*str != '\0')
{
UART0SendByte(*str++); // 发送一字节
}
}
/************************************************************
* 功 能:定时器T1中断服务子程序
************************************************************/
#pragma vector = T1_VECTOR //中断服务子程序
__interrupt void T1_ISR(void)
{
EA = 0; //禁止全局中断
counter++; //统计T1的溢出次数
T1STAT &= ~0x01; //清除通道0中断标志
EA = 1; //使能全局中断
}
/************************************************************
* 函数名称:main
* 功 能:main函数入口
*******************************************************/
void main(void)
{
P1DIR |= 0x01; /* 配置P1.0的方向为输出 */
LED1 = 0;
inittTimer1(); //初始化Timer1
initUART0(); // UART0初始化
while(1)
{
if(counter>=15)
{
counter=0;
LED1 = 1;
UART0SendString("Hello ! I am CC2530 .\n");
LED1 = 0;
}
}
}