【论文精读】门控图神经网络GGNN及SRGNN
GGNN

SRGNN是GGNN在推荐系统上的应用,核心网络几乎没有改变。GGNN的核心模型其实非常简单,在计算上和GRU基本没有区别。但为了更好的理解 a v a_v av是如何构造出来的,我们还得从最基本的思想讲起。
信息传播
绝大多数GNN的思想在于消息传播(Message Passing)或者说信念传播(Belief Propagation)。很自然的,我们知道一个节点的信息可以根据其邻居节点信息进行更新。

初代GNN
2009年最早的GNN论文1将这个过程抽象为
x n = f w ( l n , l c o [ n ] , x n e [ n ] , l n e [ n ] ) \boldsymbol{x}_{n} =f_{\boldsymbol{w}}\left(\boldsymbol{l}_{n}, \boldsymbol{l}_{\mathrm{co}[n]}, \boldsymbol{x}_{\mathrm{ne}[n]}, \boldsymbol{l}_{\mathrm{ne}[n]}\right) xn=fw(ln,lco[n],xne[n],lne[n])
其中,
x \boldsymbol{x} x为状态向量state,GGNN的记号 h \boldsymbol{h} h更符合现在的习惯
l \boldsymbol{l} l为特征向量feature,或者说embedding
c o [ n ] co[n] co[n]为与节点n相连的边,
n e [ n ] ne[n] ne[n]为节点n邻居节点.
以商品为例,商品的类别、价格、品质等具体属性可以组合为节点的特征向量,用户对商品的点击次数、停留时间等可以组合为边的特征向量。当然,hidden state x n e [ n ] \boldsymbol{x}_{\mathrm{ne}[n]} xne[n]本身也包含了embedding l n e [ n ] \boldsymbol{l}_{\mathrm{ne}[n]} lne[n]的信息,只保留一个,直接把 l \boldsymbol{l} l 作为初始的embeding也是可以的。
根据巴拿赫不动点定理,我们利用 f w f_{\boldsymbol{w}} fw不断压缩,得到稳定状态的hidden state,然后再通过 g w g_{\boldsymbol{w}} gw输出.
o n = g w ( x n , l n ) \boldsymbol{o}_{n} =g_{\boldsymbol{w}}\left(\boldsymbol{x}_{n}, \boldsymbol{l}_{n}\right) on=gw(xn,ln)
GNN将这两个映射函数设计为两个不同的前馈神经网络,

f w f_{\boldsymbol{w}} fw的层数,或者说迭代次数并非固定,当 x n \boldsymbol{x}_{n} xn达到收敛时停止,和RNN decoder输出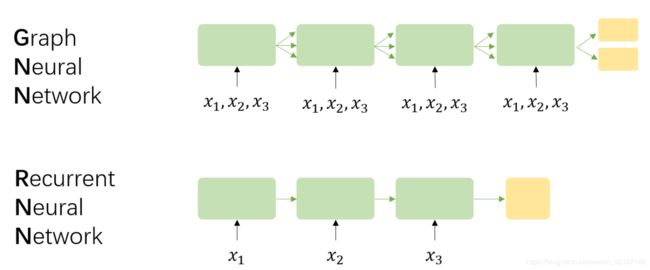
(f和w只要保证压缩映射即可,但笔者总感觉这样的网络结构并不优雅)
之后的GNN大都脱离这篇论文的原理,转向借鉴CNN/RNN的经验。
GGNN
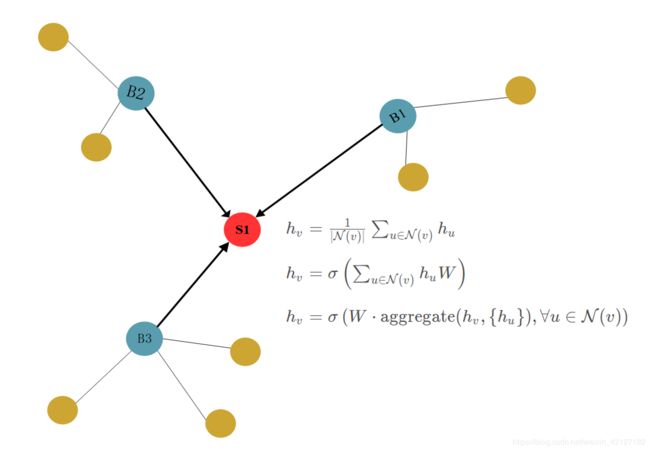
事实上,我们很容易得到一个朴素的思想:节点的信息可以根据邻居节点的信息取平均得到(当然也可以加入自身的信息)。
(或者是其他更复杂的手段,但这是之后GCN、GraphSAGE的思路了。)
GGNN的想法就非常简单,对邻居节点求和就是他的信息聚合方式。当邻接矩阵 A \mathbf{A} A有边为1,无边为0时,他有个更紧致的表达形式。
h v = 1 ⋅ ∑ u ∈ N ( v ) h u + 0 ⋅ ∑ u ∉ N ( v ) h u = A v : ⊤ H h_v=1 \cdot \sum_{u \in \mathcal{N}(v)} h_u + 0 \cdot \sum_{u \notin \mathcal{N}(v)} h_u = \mathbf{A}_{v:}^{\top}\mathbf{H} hv=1⋅∑u∈N(v)hu+0⋅∑u∈/N(v)hu=Av:⊤H
如果再加上偏置项,我们就得到了论文中描述的公式(2):
a v ( t ) = A v : ⊤ [ h 1 ( t − 1 ) ⊤ … h ∣ V ∣ ( t − 1 ) ⊤ ] ⊤ + b \mathbf{a}_{v}^{(t)}=\mathbf{A}_{v:}^{\top}\left[\mathbf{h}_{1}^{(t-1) \top} \ldots \mathbf{h}_{|\mathcal{V}|}^{(t-1) \top}\right]^{\top}+\mathbf{b} av(t)=Av:⊤[h1(t−1)⊤…h∣V∣(t−1)⊤]⊤+b
GGNN原论文没有提及平均,SRGNN采取了平均的方式,也就是归一化邻接矩阵 A \mathbf{A} A。平均并非必须,但我以为平均或者加权平均是有意义的。
一个可能的解释是:每个邻居传递来的信息都包含一个噪音 ϵ \epsilon ϵ,做了求和后,噪音也会随之增大,平均后可以使得噪音不会因为邻居数增多。
另一个可能的解释来自随机游走的思想,假设不区分邻居节点,一个节点有等分的概率游走到某一个邻居节点。
当然,你会说每个节点传递来的信息重要性不一定一样,或者说边的权重应当不同,应当加权平均,那就是GAT做的工作了。SRGNN也提到了weighted connections,但也只是简单的除以节点的度做平均。
不同类型的边
GGNN认为出边和入边是不同的,需要分别计算。

出边、入边分别构成邻接矩阵,两个邻接矩阵拼接在一起(这是形式上的表示,代码实现时可以分开计算,不一定要拼接在一起)。以SRGNN的图示为例:

不仅仅是出入边的区分,如果图中有多种边,可以同样拼接在后面,我所见到的一个第三方实现3似乎是这样。这有点类似于多层卷积的层次化特征提取思想,每一种边对应不同的权重。

但GGNN提供的概念图没有展示这种不断拼接的做法,只是说参数决定于边的类型和方向。如果不用拼接,简单的情形是为每种边分配一个固定的权重。
每种边代入其embedding应该也是可行的,不过维度变化后需要进行映射。
关于padding的疑惑

GGNN在第一步对 L V L_V LV维的节点特征向量用0填补,扩充至 D D D维,这里实在让人困惑,论文只是说通过这样的方式让hidden state的维度大于特征向量annotation。这确实是一种方式,但私以为state维度未必需要大于feature(annotation),也未必需要区分state和feature,state就是和embedding一个向量空间中也未尝不可。即便一定要有一个维度更大的状态向量,加一个矩阵做线性变换映射不也可以吗。
![]()
SRGNN是随机初始化的embedding,然后再通过权重矩阵 H \mathbf{H} H映射为hidden state。
我实在没有想到一定要填补0的情形,如果读者有其他的领会,还请麻烦解惑。
传播

与GRU类比,需要两个输入向量: a v ( t ) a_v^{(t)} av(t)作为当前时间步的输入向量, h v ( t − 1 ) h_v^{(t-1)} hv(t−1)为上一时间步的状态向量。接下来和GRU一样得到遗忘门 z \mathbf{z} z 和重置门 r \mathbf{r} r,最后得到新时刻的状态向量 h v ( t ) h_v^{(t)} hv(t),可以直接作为节点的embedding,但也可以和GNN一样再映射一次;
o n = g w ( x n , l n ) \boldsymbol{o}_{n} =g_{\boldsymbol{w}}\left(\boldsymbol{x}_{n}, \boldsymbol{l}_{n}\right) on=gw(xn,ln)
如果是整张图输出一个向量,采取soft attention的形式加权求和输出:

时间步数是一个自由设置的超参,可以重复实验选择指标最大的超参,设置为1只传播一次也没问题(SRGNN的默认参数)。GGNN不像GRU那样循环次数由输入的序列长度决定,但之所以朝着GRU设计,是因为这样可以得到一个序列性的输出。
输出模型
该拓展模型称为GGSNN.

F X ( k ) , F o ( k ) \mathcal{F}_{\mathcal{X}}^{(k)}, \mathcal{F}_{o}^{(k)} FX(k),Fo(k)分别负责更新和输出,可以是两个独立的GGNN,也可以共享GGNN的传播层而由两个不同的输出层输出(虽然减少了训练开销,但要求传播行为不同时效果可能不好)。
SRGNN
Motivation
这篇论文独创性并不多,与其说SRGNN,不如称为GGNN4rec,最大的贡献是首次将GNN应用于会话推荐。
无论是最早的HMM,还是基于RNN的模型,一般都把会话视作马尔科夫链,或者说序列建模。
SRGNN将会话历史视作一张有向图,除了考虑某item与相邻的前item的联系外,还考虑了与其他有交互的item之间的联系(会话图中的节点可能会有多个入点出点,但至少比RNN多考虑了后一个item),也就是考虑了上下文的过渡信息。另外,序列推荐的输出来自最后一个item,SRGNN认为会话(尤其是短时间的会话)中应该更考虑整体的信息。
核心模型

SRGNN利用GGNN进行item embedding的计算。

整个数据集item之间的转移构成了一张非常大的图,但SRGNN只考虑一个会话中出现的item构成的子图,在会话不是很长时,就不会有内存溢出的问题。(上面的图示右侧输出了7个item的score,容易引起误会,应该是4个,而非batch中item总数)
SRGNN也是用了data augmentation的方式,将一条session增广为多条,即 [ v 1 , v 2 ] , [ v 1 , v 2 , v 3 ] , . . . , [ v 1 , v 2 , . . . , v n ] [v_1, v_2], [v_1, v_2, v_3], ..., [v_1, v_2, ..., v_n] [v1,v2],[v1,v2,v3],...,[v1,v2,...,vn]
另外,直接根据图计算,会出现原始序列顺序混淆的情况,比如
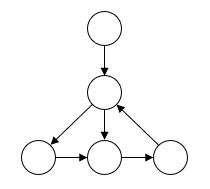
无法明确地指出第二个节点先指向哪个节点,尽管这种情况发生的概率很小。数据增广就可以保证顺序信息的完整。
和GGNN一样,得到的新embedding通过注意力机制计算得到一个global session embedding s g s_g sg

虽然注意力计算中也单独加入了最近item v n v_n vn来强调用户的当前兴趣,但SRGNN借鉴NARM,也同时加入了local session embedding, s l s_l sl可以简单地使用最后一个item的embedding来表示。

然后拼接两个session emb,通过一个Linear层计算出混合的session emb,

最后作为user vector,和item embedding计算score,由交叉熵来控制损失。

同样地,SRGNN也继承了GGNN的缺点,比如复杂的噪声连接和过平滑问题(各节点互相学习削弱了差异)等。
比较
| GRU4rec | SRGNN |
|---|---|
| 序列模型,只考虑上一节点到当前节点的过渡关系 | 图模型,考虑更复杂的过渡关系,包括若干出点和入点与当前节点的联系 |
| 仅考虑用户的当前兴趣 | 使用Attention机制,考虑用户的当前兴趣和整体兴趣 |
| 循环次数由序列长度决定 | 循环次数是个超参,SRGNN默认为1 |
| 有负采样,pairwise loss(BPR、TOP1) | 没有负采样,pointwise loss(NLL) |
| minibatch,代码比较复杂 | data augmentation,实现比较简单(但序列长度较长时不适用于RNN) |
前三行也是GRU和GGNN的区别
The graph neural network model ↩︎
从图(Graph)到图卷积(Graph Convolution):漫谈图神经网络模型 (一) ↩︎
ggnn.pytorch ↩︎