7、RabbitMQ集群(普通模式、镜像模式)
【普通模式】
RabbitMQ是基于Erlang编写,Erlang语言天生具备分布式特性(通过同步Erlang集群各节点的magic cookie来实现)。因此,RabbitMQ天然支持Clustering。这使得RabbitMQ本身不需要像ActiveMQ、Kafka那样通过ZooKeeper分别来实现HA高可用方案和保存集群的元数据。集群是保证可靠性的一种方式,同时可以通过水平扩展以达到增加消息吞吐量能力的目的。
一、RabbitMQ集群元数据的同步
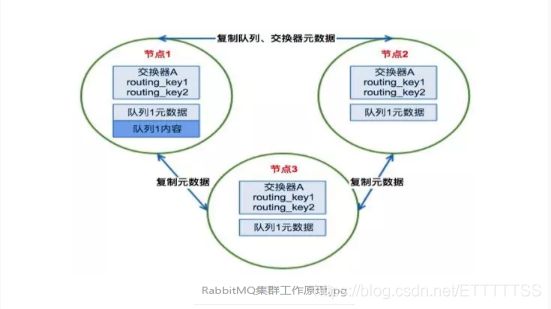
RabbitMQ集群会始终同步四种类型的内部元数据:
1.队列元数据:队列名称、属性;
2.交换器元数据:交换器名称、类型和属性;
3.绑定元数据:交换器与队列绑定关系,如binding_key;
4.vhost元数据:虚拟主机内部配置和属性;
因此,当用户访问其中任何一个RabbitMQ节点时,通过rabbitmqctl查询到的queue/user/exchange/ vhost等信息都是相同的。
注意:队列只同步元数据信息,不会同步存储的消息,消息只会存在于创建该队列的节点上,其它节点只知道这个队列的元数据信息和一个指向队列的owner node的地址。
二、为何RabbitMQ集群仅采用元数据同步的方式
RabbitMQ这么设计主要是基于集群本身的性能和存储空间上来考虑。
第一,存储空间,如果每个集群节点都拥有所有Queue的完全数据拷贝,那么每个节点的存储空间会非常大,集群的消息积压能力会非常弱(无法通过集群节点的扩容提高消息积压能力);
第二,性能,消息的发布者需要将消息复制到每一个集群节点,对于持久化消息,网络和磁盘同步复制的开销都会明显增加。
三、RabbitMQ集群的基本原理
场景1、客户端直接连接队列所在节点
如果有一个消息生产者或者消息消费者通过amqp-client的客户端连接至节点1进行消息的发布或者订阅,那么此时的集群中的消息收发只与节点1相关。
场景2、客户端连接的是非队列数据所在节点
如果消息生产者所连接的是节点2或者节点3,此时队列1的完整数据不在该两个节点上,那么在发送消息过程中这两个节点主要起了一个路由转发作用,根据这两个节点上的元数据(也就是上文提到的:指向queue的owner node的指针)转发至节点1上,最终发送的消息还是会存储至节点1的队列1上。
同样,如果消息消费者所连接的节点2或者节点3,那这两个节点也会作为路由节点起到转发作用,将会从节点1的队列1中拉取消息进行消费。
由于节点之间存在路由转发的情况,所以对于RabbitMQ集群最好是在一个局域网。
四、RabbitMQ集群搭建
【普通模式】
1、准备5台机器
vim /etc/hosts
192.168.174.10 node1
192.168.174.11 node2
192.168.174.12 node3
192.168.174.13 node4
192.168.174.14 node5
reboot # 重启生效
2、按照【2、RabbitMQ安装(Linux单机)】保证每台机器的RabbitMQ服务节点都能正常启动
3、集群配置
以node1为master节点,node2-5为slave节点
在node2-5 slave节点上执行如下:
./rabbimqctl stop # 停止Erlang虚拟机和RabbitMQ服务
复制node1节点的/root/.erlang.cookie(ls -al)文件到node2-5节点上
scp /root/.erlang.cookie root@node2:~
scp /root/.erlang.cookie root@node3:~
scp /root/.erlang.cookie root@node4:~
scp /root/.erlang.cookie root@node5:~
注:cookie保持相同才能实现Erlang内部通信,cookie也可能在/var/lib/rabbitmq/目录下。
./rabbitmq-server -datached # 启动RabbitMQ服务
将node2-5 slave节点加入到集群
./rabbitmqctl stop_app
./rabbitmqctl reset
./rabbitmqctl join_cluster rabbit@node1
./rabbitmqctl start_app
RabbitMQ集群中的节点有两种类型:
内存节点/磁盘节点,单节点系统只运行磁盘类型的节点。而在集群中,可以选择配置部分节点为内存节点,内存节点性能更高。至少需要两个以上的磁盘节点,这样当一个磁盘节点挂掉后还有另一个磁盘节点顶替,保证集群中创建资源(队列、交换器、vhost等)依然可行。
./rabbitmqctl join_cluster rabbit@node1 --ram # 指定节点类型为内存节点,默认为磁盘
./rabbitmqctl change_cluster_node_type disc|ram # 修改节点类型
4、查看集群状态(任一节点)
./rabbitmqctl cluster_status
5、修改集群名称(任一节点,默认为master node名称)
./rabbitmqctl set_cluster_name rabbitmq_cluster1
6、移除集群节点
./rabbitmqctl forget_cluster_node rabbit@node2(具体节点)
7、KeepAlived + HAProxy实现主备切换、负载均衡,省略…
【镜像模式—镜像队列】
需要在集群普通模式的基础上进行镜像队列的配置
镜像队列
队列进程及其内容仅仅维持在单个节点之上,所以一个节点的失效表现为其对应的队列不可用。
引入镜像队列(Mirror Queue)的机制,可以将队列镜像到集群中的其他Broker节点之上,如果集群中的一个节点失效了,队列能够自动切换到镜像中的另一个节点上以保证服务的可用性。
针对每个队列的(以下简称镜像队列)都包含一个主节点(master)和若干个从节点(slave)
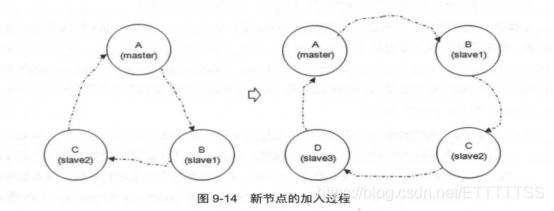
由图可知master和slave组成了一个链表结构。
slave会准确地按照maste执行命令地顺序进行动作,故slave和master上维护的状态应该是相同的。如果master由于某种原因失效,那么“资历最老”(基于slave加入cluster的时间排序)的slave会被提升为新的master。发送到镜像队列的所有消息会被同时发往 master和所有的slave上,如果此时master挂掉了,消息还会在slave上,这样slave提升为 master的时候消息也不会丢失。
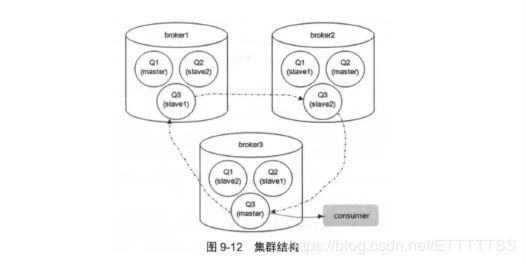
集群中的每个 Broker 节点都包含 1 个队列的 master 和 2 个队列的 slave, Q1 的负载大多都在 broker1 上,Q2 的负载大多都集中在 broker2 上,Q3 的负载大多都集中在 broker3 上,只要确保队列的 master 节点均匀散落在集群中的各个 Broker 节点即可确保很大程度的负载均衡。
master提供读写服务,在slave上的操作都会路由到master上,slave只做备份-主备切换
RabbitMQ 的镜像队列同时支持publisher confirm和事务两种机制
当slave挂掉之后,除了与slave相连的客户端连接全部断开,没有其他影响
当master挂掉之后,会有以下影响:
- 与master连接的客户端连接全部断开;
- 选举最老的slave作为新的master,因为最老的slave与旧的master之间的同步状态应该是最好的。如果此时所有slave处于未同步状态,则未同步的消息会丢失;
- 新的master重新入队所有unack的消息,因为新的slave无法区分这些unack的消息是否己经到达客户端,或者是ack信息丢失在老的master链路上,再或者是丢失在老的master 组播ack消息到所有slave的链路上,所以出于消息可靠性的考虑,重新入队所有unack的消息,不过此时客户端可能会有重复消息;
- 如果客户端连接着slave,并且Basic.Consume 消费时指定了x-cancel-on-ha-failover 参数,那么断开之时客户端会收到一个Consumer Cancellation Notification的通知,消费者客户端中会回调Consumer接口的handleCancel方法。如果未指定x-cancel-on-ha-failover参数,那么消费者将无法感知 master 宕机;
当所有slave都出现未同步状态,并且ha-prornote-on-shutdown设置为when-synced(默认)时,如果master因为主动原因停掉,比如通过rabbitrnqctl stop命令或者优雅关闭操作系统,那么slave不会接管master,也就是此时镜像队列不可用。但是如果master因为被动原因停掉,比如Erlang虚拟机或者操作系统崩溃,那么slave会接管master。这个配置项隐含的价值取向是保证消息可靠不丢失,同时放弃了可用性。如果ha-prornote-on-shutdown设置为always ,那么不论master因为何种原因停止,slave都会接管master,优先保证可用性,不过消息可能会丢失。
镜像队列中最后一个停止的节点会是master,启动顺序必须是master先启动。如果slave先启动,它会有30 秒的等待时间,等待master的启动,然后加入到集群中。如果30 秒内 master没有启动,slave会自动停止。当所有节点因故(断电等)同时离线时,每个节点都认为自己不是最后一个停止的节点,要恢复镜像队列,可以尝试在30秒内启动所有节点。
镜像队列的配置
./rabbitmqctl set_policy [-p
./rabbitmqctl set_policy -p / ha “^” ‘{“ha-mode”:“all”,“ha-sync-mode”:“automatic”}’
name:ha为策略名称—设置镜像队列;
pattern:”^”为匹配队列的正则表达式;
definition:
- ha-mode:
镜像队列的模式,有效值为all、exactly、nodes,默认all。
all表示在集群中所有的节点上进行镜像,当新节点添加到群集时,队列将镜像到 该节点;
exactly表示在指定个数的节点上进行镜像,节点个数由ha-params指定;
nodes表示在指定节点上进行镜像,节点名称通过 ha-params 指定,节点的名称通 常类似于rabbit@hostname,可以通过rabbitmqctl cluster_status命令查看到。 - ha-params:不同的ha-mode配置中需要用到的参数。
- ha-sync-mode:队列中消息的同步方式,有效值为automatic和manual。
manual手动<默认模式>,新的队列镜像将不会收到现有的消息,它只会接收新的 消息;
automatic自动同步,当一个新镜像加入时,队列会自动同步。队列同步是一个阻 塞操作。
查看哪些slave已经完成同步
./rabbitmqctl list_queues {name} slave_pids_synchronised_slave_pids
手动方式同步一个队列
./rabbitmqctl sync_queue {name}
取消某个队列的同步操作
./rabbitmqctl cancel_sync_queue {name}:
清除策略
./rabbitmqctl clear_policy [-p
查看策略
./rabbitmqctl list_policies [-p