OpenGL之3D数学的向量和矩阵
向量
基本概念
- 既有大小又有方向的量称之为向量,与之相对应的是标量,标量是只有大小没有方向的量;
- 在3D笛卡尔坐标系:基本上,一个顶点就是XYZ 坐标空间上的一个位置,而在空间中给定的⼀个位置恰恰是由⼀个单独的 XYZ 定义的,而这样的 XYZ 就是向量;
- 长度为0的向量称之为零向量,零向量与所有向量平行;
- 模为1的向量称之为单位向量,单位向量并不是唯一的,每个向量单位化以后都是单位向量;
- 空间向量长度(向量的模)计算公式:
![]()
- math3d库,有2个数据类型,能够表示一个三维或者四维向量:
M3DVector3f可以表示⼀个三维向量(x,y,z), M3DVector4f则可以表示⼀个四维向量(x,y,z,w);(在典型情况下,w坐标设为1.0。x,y,z值通过除以w,来进行缩放。而除以1.0则本质上不改变x,y,z值 )
// 三维向量/四维向量的声明
typedef float M3DVector3f[3];
typedef float M3DVector4f[4];
// 声明⼀个三维向量 M3DVector3f:类型 vVector:变量名
M3DVector3f vVector;
// 声明一个四维向量并初始化⼀个四维向量
M3DVector4f vVertex = {0,0,1,1};
// 声明一个三分量顶点数组,例如生成⼀个三角形
M3DVector3f vVerts[] = {
-0.5f,0.0f,0.0f,
0.5f,0.0f,0.0f,
0.0f,0.5f,0.0f};
运算
一、向量的数乘
- 向量的数乘表示向量跟一个实数相乘的乘积,结果还是一个向量。 比如实数a跟一个向量V=(Vx, Vy)相乘,结果为aV=(aVx, aVy);
- 在坐标轴中,如果一个物体的位置为A(3, 3, 3),如果将其位置乘以2再赋值给这个物体,那么A的位置就会变成A’(6,6,6)。也就是说,将这个物体的位置从A点移动到了A’点.
二、向量的加法
- 两个向量相加以后的结果还是一个向量,新向量的各个分量的值等于两个向量的对应分量的加值。计算公式为A + B = (A1 + B1, A2 + B2 … , An + Bn)(例如两个二维向量相加,向量C等于向量A(3, 4)加向量B(5, 6),即:C = A + B = (3+5, 4+6));
- 遵循“平行四边形法则”和“三角形法则”;

三、向量的减法
- 两个向量相减所得还是一个向量,这个向量的各个分量的值为旧向量的各个分量的差值。公式为:A - B = (A1 + B1, A2 + B2 … , An + Bn)。(例如两个二维向量相加,向量C等于向量A(3, 4)加向量B(5, 6),即:C = A - B = (3-5, 4-6))
- 遵循“三角形法则”:减法的所得的最终向量,其方向是由减数向量的终点指向被减数向量的终点。

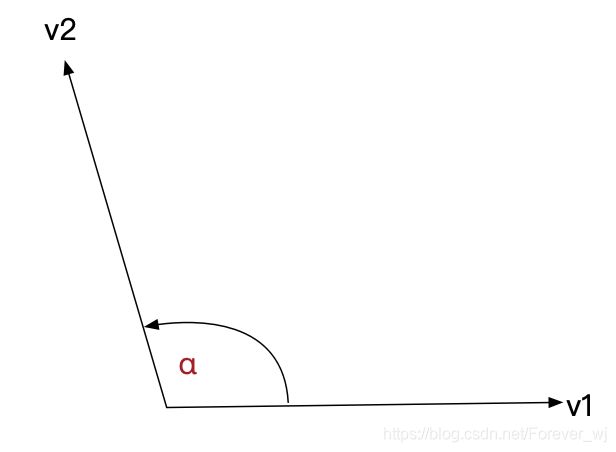
四、向量的点乘(dot product)
- 向量的点积表示为A · B = A1B1 + A1B1 + … + AnBn;
- 几何意义:点乘表示了两个向量的接近程度,即夹角越小,两个向量越靠近,在等于0的时候平行,等于1的时候垂直。因此向量的点乘在游戏中经常用来判断两个向量的接近程度。比如两个移动的物体是否会撞上,需要不需要避开之类的AI计算。同时,已知两个向量,可以计算两个向量的夹角。从而进行旋转操作等
A·B > 0,则夹角在[0, 90);
A·B = 0,则夹角等于 90,两个向量垂直
A·B < 0,则夹角在(90,180) - 点乘只能在2个向量之间进行;
- 2个(三维向量)单元向量之间进行点乘运算将得到⼀个标量(不是三维向量,是⼀个标量),它表示两个向量之间的夹⻆;
- 性质:
A·B = B·A 点乘满足交换律;
A·(B + C) = A·B + A·C 点乘满足分配律;
(aA)·B = a(A·B) 一个实数不影响两个向量的点乘 - math3d 库中提供了关于点乘的API:
// m3dDotProduct3 函数获得2个向量之间的点乘结果,即余弦值cosα
float m3dDotProduct3(const M3DVector3f u,const M3DVector3f v);
// m3dGetAngleBetweenVector3 即可获取2个向量之间夹角的弧度值 α = arccos余弦
float m3dGetAngleBetweenVector3(const M3DVector3f u,const M3DVector3f v);
五、向量的叉乘(cross product)
- 两个叉乘所得出的新向量,垂直与这两个向量,并穿过这两个向量的交叉点。新向量的方向则取决于使用的坐标系,Unity使用的是左手坐标系,OpenGL使用的是右手坐标系。左手坐标系中,左手掌心向外,食指向上,中指向前,大拇指的方向就是x轴,食指指向的是y轴,中指指向的是z轴,将两个向量对准坐标轴,剩余的一个方向就是新向量的方向。
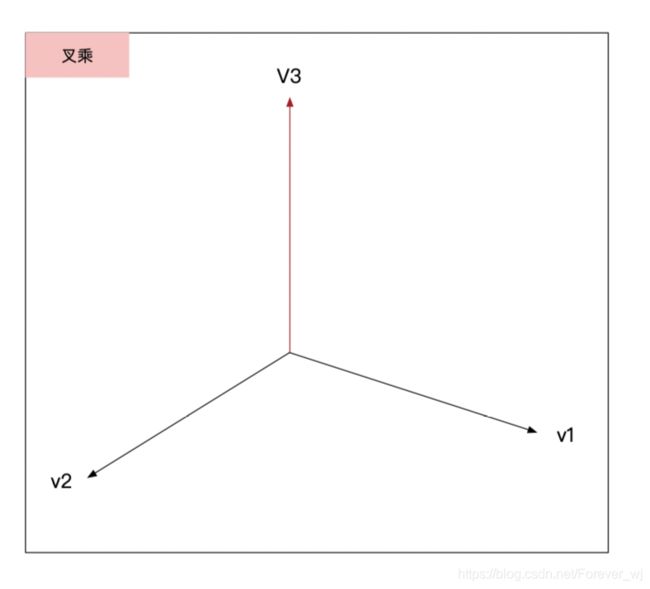
- 叉乘的模:|A X B| = |A||B|sinα,其中α是两个向量的夹角;
- math3d 库中提供了关于叉乘的API
// m3dCrossProduct3 函数获得2个向量之间的叉乘结果得到⼀个新的向量
void m3dCrossProduct3(M3DVector3f result,const M3DVector3f u ,const
M3DVector3f v);
矩阵(Matrix)
概念
- 在其他编程标准中, 许多矩阵库定义一个矩阵时,使用⼆维数组;OpenGL的约定里,更多倾向使用一维数组;
- 矩阵声明
// 三维矩阵/四维矩阵的声明
typedef float M3DMatrix33f[9];
typedef float M3DMatrix44f[16];
-
OpenGL 使⽤的是 Column-Major(以列为主)矩阵排序的约定;⾏优先矩阵(左)和列优先矩阵(右)如下图所示:

-
⾏优先矩阵与列优先矩阵互为转置矩阵;
-
矩阵的这16个值表示空间中⼀个特定的位置; 这4列中,每⼀列都是有4个元素组成的向量;(第一列:X轴方向,第二列:Y轴方向,第三列:Z轴方向,第四列:交换位置);
-
如果将⼀个对象所有的顶点向量乘以矩阵,就能让整个对象变换到空间中给定的位置和⽅向;
-
列向量进行了特别的标注:矩阵的最后⼀行都为0,只有最后⼀个元素为1。
单元矩阵
- 主对角线上数据都是1,其余元素都是0,即为单元矩阵。其初始化方式有:
// 单元矩阵初始化⽅式1
GLFloat m[] = {
1,0,0,0, // X Column
0,1,0,0, // Y Column
0,0,1,0, // Z Column
0,0,0,1}; // Translation
// 单元矩阵初始化方式2
M3DMatrix44f m = {
1,0,0,0, // X Column
0,1,0,0, // Y Column
0,0,1,0, // Z Column
0,0,0,1};// Translation
// 单元矩阵初始化⽅式3
void m3dLoadIdentity44f(M3DMatrix44f m);
- 将⼀个向量✖ 单元矩阵,就相当于⼀个向量✖1, 不会发⽣任何改变;

-
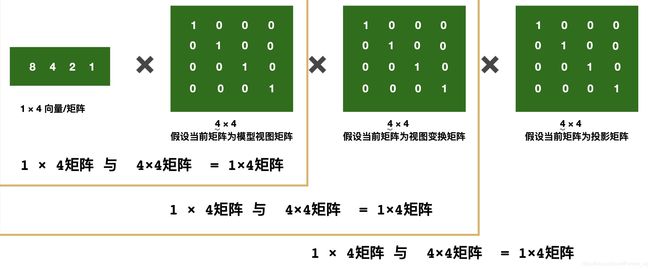
在线性代数中:
变换后顶点向量 = V_local * M_model * M_view * M_pro
变换后顶点向量 = 顶点 ✖ 模型矩阵 ✖ 观察矩阵 ✖ 投影矩阵
-
在OpenGL 的维度,如下列公式:
变换顶点向量 = M_pro * M_view * M_model * V_local
变换顶点向量 = 投影矩阵 ✖ 视图变换矩阵 ✖ 模型矩阵 ✖ 顶点
-
矩阵左乘的代码如下:
从栈顶获取栈顶矩阵复制到 mTemp;将栈顶矩阵 mTemp 左乘 mMatrix;将结果放回栈顶空间⾥;
inline void MultMatrix(const M3DMatrix44f mMatrix) {
// 矩阵左乘
M3DMatrix44f mTemp;
m3dCopyMatrix44(mTemp, pStack[stackPointer]);
m3dMatrixMultiply44(pStack[stackPointer], mTemp, mMatrix);
}
inline void MultMatrix(GLFrame& frame) {
M3DMatrix44f m;
frame.GetMatrix(m);
MultMatrix(m);
}
- ChangeSize函数中,得到投影矩阵,将投影矩阵压入投影矩阵堆栈栈顶,并与模型视图矩阵栈顶相乘,将结果覆盖栈顶,即 投影矩阵 * 单元矩阵 = 投影矩阵;
RenderScene函数中,将栈顶矩阵copy一份,然后将观察者矩阵与模型视图矩阵堆栈栈顶相乘,其结果覆盖栈顶矩阵,即投影矩阵 * 视图矩阵 = 视图投影矩阵;
得到模型矩阵,将模型矩阵与栈顶矩阵相乘,其结果覆盖栈顶矩阵,即栈顶 = 模型视图投影矩阵;
// 投影矩阵 projectionMatrix
modelViewMatrix.PushMatrix();
M3DMatrix44f pm;
projectionMatrix.GetMatrix(pm);
modelViewMatrix.MultMatrix(pm);
// 观察者矩阵 viewMatrix
modelViewMatrix.PushMatrix();
M3DMatrix44f mCamera;
cameraFrame.GetCameraMatrix(mCamera);
modelViewMatrix.MultMatrix(mCamera);
// 模型变换矩阵 modelMatrix
M3DMatrix44f mObjectFrame;
viewFrame.GetCameraMatrix(mObjectFrame);
modelViewMatrix.MultMatrix(mObjectFrame);
矩阵的运算
矩阵的点乘
- A*B是以数学运算中矩阵相乘的方式实现的,即Mat矩阵A和B被当做纯粹的矩阵做乘法运算,这就要求A的列数等于B的行数时,才能定义两个矩阵相乘。如A是m×n矩阵,B是n×p矩阵,它们的乘积AB是一个m×p矩阵。

- C中第i行第j列所在元素C(i,j)等于A中第i行所有元素跟B中第j列所有元素一一对应的乘积之和。对于A、B都是2行2列矩阵的情况:

矩阵的dot(A.dot(B))
-
A.dot(B)操作相当于数学向量运算中的点乘,也叫向量的内积、数量积;
-
对两个向量执行点乘运算,就是对这两个向量对应位一一相乘之后求和的操作,点乘的结果是一个标量;
-
对于向量a和向量b:

a和b的点积公式为:

要求向量a和向量b的行列数相同。 -
Mat矩阵的dot方法扩展了一维向量的点乘操作,把整个Mat矩阵扩展成一个行(列)向量,之后执行向量的点乘运算,仍然要求参与dot运算的两个Mat矩阵的行列数完全一致;
-
dot方法声明中显示返回值是double,所以A.dot(B)结果是一个double类型数据,不是Mat矩阵,不能把A.dot(B)结果赋值给Mat矩阵。
-
dot操作不对参与运算的矩阵A、B的数据类型做要求,CV_8UC1、CV_32FC1等,可以是任何Opencv定义的类型;
-
若参与dot运算的两个Mat矩阵是多通道的,则计算结果是所有通道单独计算各自.dot之后,再累计的和,结果仍是一个double类型数据。