LINUX的IIC驱动从这开始(三)
这一篇主要是在友善的Smart210开发板上写一个符合linux的iic驱动模型的设备驱动程序,这样能有一个更感性的认识。
开发环境介绍:
主机linux版本:fedora14
开发板:友善的Smart210
嵌入式linux版本:linux-3.0.8(友善光盘自带的)
交叉编译器:arm-linux-gcc-4.5.1(友善光盘自带的)
硬件简单介绍:
 、
、
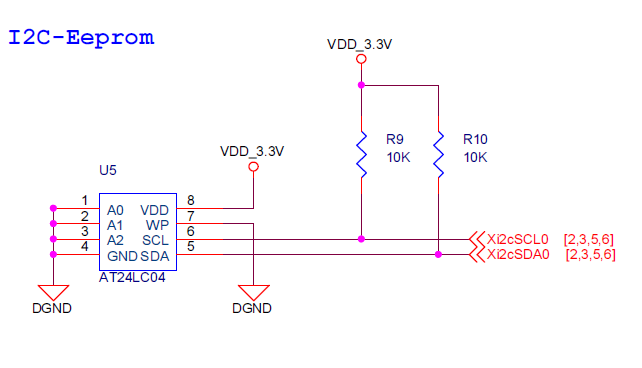
这是从友善的原理图上截下的图,这个图没有什么复杂的,从图可以看出来EEPROM是和s5pv210上的第0个iic适配器连接的,但我是用第1个适配器写的,所以用线直接把适配器1的引脚和EEPROM相连的,我这边正好有这个项目需要,所以这样写了,你可以直接用适配器0就行了,在写驱动的时候我会说怎么选iic适配器0和iic适配器1。
我们前面说过iic驱动模型是采用分层思想的,也即总线驱动和设备驱动是分开的。那它们怎么相互联系了?总得要一个什么东西来做个匹配吧,就像以前的地下工作者,需要接头暗号,要不然就乱套了,哈哈!iic总线和设备之间是用名字做匹配的,那好了,那就先得把设备的名字告诉总线吧,下面就是如何在总线上注册设备信息了。
注册设备信息
阅读linux下的Documentation/i2c/instantiating-devices 文档可以知道有两种方式可以注册,咱们只说前一种。打开:linux-3.0.8/arch/arm/mach-s5pv210/mach-mini210.c这个.c文件。就是在这个文件中填写咱们设备的信息的,这就是所说的bsp文件。首先添加头文件#include
static struct at24_platform_data at24c08 = {
.byte_len = SZ_8K / 8, //eeprom的容量大小(地址的总数)
.page_size = 16, //eeprom的一页中包含的字节数}; 然后添加如下的信息,主要把eeprom的信息包装成符合iic模型中的设备信息的格式
static struct i2c_board_info i2c_devices[] __initdata = {
{ I2C_BOARD_INFO("at24c08b", 0x50), //后边的0x50是eeprom的地址,可能有人说应该是0xa0,但linux中需要的是7bit的地址,所以向右移一位,正好是0x50。当然了,最终会在linux的iic的读函数和写函数中变成0xa0和0xa1的格式
.platform_data = &at24c08,
},
}; 最后在mini210_machine_init函数中把上面写的信息注册到iic总线上
static void __init mini210_machine_init(void)
{
...
s3c_i2c2_set_platdata(&i2c2_data);
i2c_register_board_info(0, mini210_i2c_devs0,
ARRAY_SIZE(mini210_i2c_devs0));
//i2c_register_board_info(1, mini210_i2c_devs1,
//ARRAY_SIZE(mini210_i2c_devs1)); //把友善原来带的屏蔽掉
i2c_register_board_info(1, i2c_devices, //仿照上面的添加如下的,主要这里分为0、1和2,你可以修改适配器0的,这样不需要连线
ARRAY_SIZE(i2c_devices));
i2c_register_board_info(2, mini210_i2c_devs2,
ARRAY_SIZE(mini210_i2c_devs2)); ...}设备驱动编写
首先咱们是用eeprom读写一些数据,数据量不会很大,所以它应该是个字符设备,尽管它从iic驱动模型的角度说,是iic设备,起始这并不矛盾。因为字符设备里包括了一部分的iic设备,下面就是整个驱动了
#include
#include
#include
#include
#include
#include
#include
#include
#include
#include
#define DEVICE_NAME "at24c08"
//#define DEBUG
struct At24c08_dev
{
char name[30];
struct i2c_client *at24c08_client;
struct miscdevice at24c08_miscdev; //因为本身是一个字符设备,所以定义成一个杂项设备
unsigned short current_pointer;
};
struct At24c08_dev *At24c08_devp; //定义一个全局的,因为结构体力里面的atc08_client需要从probe函数中获得
//open函数主要是把全局的At24c08_devp赋给file文件的私有数据,这样在其他的函数中调用方便
static int at24c08_open(struct inode *inode,struct file *file){
file->private_data = At24c08_devp;
return 0;
}
//这就是杂项设备的read方法,跟普通的杂项设备的read方法没什么不一样的,只是调用的i2c_read_byte_data用来实际传输数据
static ssize_t
at24c08_read(struct file *file,char *buf,size_t count,loff_t *ppos)
{
int i = 0;
int transferred = 0;
char value;
char my_buff[50];
struct At24c08_dev *dev = (struct At24c08_dev *)file->private_data;
dev->current_pointer = 0;
if(i2c_check_functionality(dev->at24c08_client->adapter,I2C_FUNC_SMBUS_READ_BYTE_DATA))
{
while(transferred < count)
{
msleep(10); //这里一定注意,要不这个延时加上,因为cpu速度比较快,eeprom速度比较慢,所以不加会出问题,我调试时就出问题了,后加的
value = i2c_smbus_read_byte_data(dev->at24c08_client,dev->current_pointer +i);
my_buff[i++] = value;
transferred ++;
}
if(!copy_to_user(buf,(void *)my_buff,transferred))
printk("The data copying from kernel to userspace success!\n");
else
printk("Mybe some errors has occured\n");
dev->current_pointer +=transferred;
}
return transferred;
}
//这就是注册的杂项设备的write方法
static ssize_t
at24c08_write(struct file *file,const char *buf,size_t count,loff_t *ppos)
{
int i = 0;
int transferred = 0;
char my_buff[50];
struct At24c08_dev *dev = (struct At24c08_dev *)file->private_data;
dev->current_pointer = 0;
if(i2c_check_functionality(dev->at24c08_client->adapter,I2C_FUNC_SMBUS_BYTE_DATA))
{
if(!copy_from_user(my_buff,buf,count))
{
printk("The data copying from userspace to kernel success!\n");
while(transferred < count)
{
msleep(10);//与上面的read函数中的类似
i2c_smbus_write_byte_data(dev->at24c08_client,dev->current_pointer + i,my_buff[i]); //这个函数通过adapter的通信方法把一个字节的数据发送 //到iic设备中去
i ++;
transferred ++;
}
dev->current_pointer +=transferred;
}
else
printk("Mybe some errors has occured\n");
}
return transferred;
}
static const struct file_operations at24c08_fops ={
.owner = THIS_MODULE,
.open = at24c08_open,
.read = at24c08_read,
.write = at24c08_write,
};
//当把设备挂接到总线上时,只有当at24c08b_id所起的名字和之前注册到总线当中的名字一样时,才会调用probe函数。在probe函数里会分配i2c_client,通过这个//i2c_client,当调用注册的字符设备时,iic适配器就知道把数据跟那个iic设备交互。
static int __devinit at24c08b_probe(struct i2c_client *client,const struct i2c_device_id *id)
{
int ret;
#ifdef DEBUG
printk("The routine of probe has started(for binding device)\n");
#endif
At24c08_devp = kmalloc(sizeof(struct At24c08_dev),GFP_KERNEL);
if(!At24c08_devp)
{
return ret = -ENOMEM;
}
memset(At24c08_devp,0,sizeof(struct At24c08_dev));
At24c08_devp->at24c08_client = client; //把分配的i2c_client赋给定义的全局变量
At24c08_devp->at24c08_miscdev.minor = MISC_DYNAMIC_MINOR;
At24c08_devp->at24c08_miscdev.name = DEVICE_NAME;
At24c08_devp->at24c08_miscdev.fops = &at24c08_fops; //把杂项设备的一些域用我们具体的方法定义
ret = misc_register(&At24c08_devp->at24c08_miscdev); //注册杂项设备
#ifdef DEBUG
printk("The driver of at24c08 has registered!\n");
#endif
return ret;
}
static int __devexit at24c08b_remove(struct i2c_client *client)
{
misc_deregister(&At24c08_devp->at24c08_miscdev);
#ifdef DEBUG
printk("The routine of remove has implemented!\n");
#endif
return 0;
}
static const struct i2c_device_id at24c08b_id[]={
{"at24c08",0},
{}
}; //当把设备挂接到总线上时,就调用这里面的名字和注册在总线里的名字比对,如果一样就会调用probe函数,同时给挂接的设备分配i2c_client结构体
MODULE_DEVICE_TABLE(i2c,at24c08b_id);
static struct i2c_driver at24c08b_driver = {
.driver = {
.name = "at24c08",
.owner=THIS_MODULE,
},
.probe = at24c08b_probe,
.remove=__devexit_p(at24c08b_remove),
.id_table =at24c08b_id,
};
static int __init at24c08b_init(void)
{
#ifdef DEBUG
printk(KERN_NOTICE"The driver of at24c08 is insmod!\n");
#endif
return i2c_add_driver(&at24c08b_driver); //把iic设备挂接到总线上
}
void at24c08b_exit(void)
{
#ifdef DEBUG
printk(KERN_NOTICE"at24c0b is rmmod!\n");
#endif
i2c_del_driver(&at24c08b_driver); //把iic设备移除,这时会调用remove函数,所以在remove函数中一般会干一些注销设备的工作等
}
MODULE_DESCRIPTION("at24c08b eeprom driver");
MODULE_LICENSE("Dual BSD/GPL");
MODULE_AUTHOR("xie yingdong");
module_init(at24c08b_init);
module_exit(at24c08b_exit);
obj-m:=eeprom-driver.o
KDIR = /tmp/linux-3.0.8 //这里需要你根据自己的实际的linux源码放的位置来设置
all:
$(MAKE) -C $(KDIR) SUBDIRS=$(shell pwd) modules ARCH=arm CROSS_COMPILE=arm-linux-
clean:
@rm -rf eeprom-driver*.o#include
#include
#include
#include
#include
#include
int main(void)
{
int i;
char value[19] = "eeprom-driver test!";
char backvalue[19];
int fd;
fd = open("/dev/at24c08",O_RDWR); //这里的名字一定要和驱动里注册的杂项设备的名字一样,但跟iic设备的名字无关,这里只是正好取的一样而已
if(fd<0){
printf("Open at24c08 device failed!\n");
exit(1);
}
write(fd,value,19);
printf("The string writing to eeprom : %s\n",value);
printf("##################################################\n");
sleep(1);
read(fd,backvalue,19);
printf("The string reading from eeprom : %s\n",backvalue);
close(fd);
return 0;}
哈哈,驱动就写完了,我自己测试了,没问题,你可以试试,下一篇我们会分析iic总线驱动。