opencv(21)---轮廓属性特征以及应用之凹包
凸包
基本概念
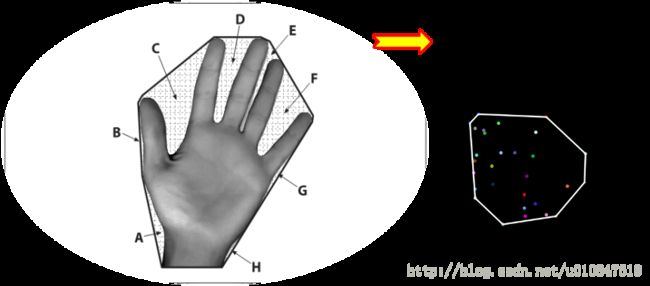
凸包(Convex Hull)是一个计算机几何图形学中的概念, 简单来说, 给定二维平面点集, 凸包就是能够将最外层的点连接起来构成的凸多边形, 它能够包含点集中所有的点。物体的凸包检测场应用在物体识别、手势识别及边界检测等领域。
寻找凸包—convexHull()
函数原型
- points: 输入的二维点集, 可以填Mat类型或std::vector
- hull: 函数调用后找到的凸包
- clockwise: 操作方向标志符, 当为true时, 输出的凸包为顺时针方向, false为逆时针方向(假定坐标系x轴指向右,y轴指向上方)
- returnPoints: 操作标志符, 默认值true. 当标志符为true时, 函数返回凸包各个点, 否则返回凸包各点的指数, 当输出数组是std::vector时, 此标志被忽略
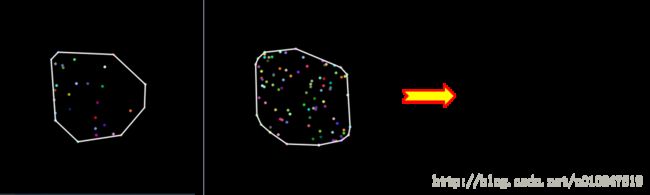
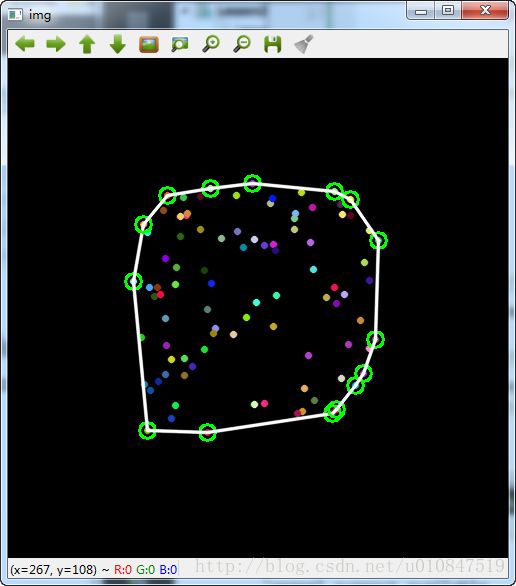
凹包一- - -点集的凹包
代码
Mat img(500, 500, CV_8UC3, Scalar::all(0)); //定义绘制图像
RNG rng; //定义随机数对象
while(1)
{
char key;
int count = (unsigned int)rng % 100; //定义点的个数
vector4, img.cols*3/4); //设定点的x范围
pt.y = rng.uniform(img.rows/4, img.rows*3/4); //设定点的y范围
points.push_back(pt);
}
//检测凸包
vector<int> hull;
convexHull(Mat(points), hull, true);
img = Scalar::all(0);
for(int i = 0; i < count; i++ )
circle(img, points[i], 3, Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)), CV_FILLED, CV_AA);
//准备参数
int hullcount = (int)hull.size(); //凸包的边数
Point point0 = points[hull[hullcount-1]]; //连接凸包边的坐标点
//绘制凸包的边
for(int i = 0; i < hullcount; i++ )
{
Point point = points[hull[i]];
circle(img, point, 8, Scalar(0, 255, 0), 2, 8);
line(img, point0, point, Scalar(255, 255, 255), 2, CV_AA);
point0 = point;
}
//显示效果图
imshow("img", img);
//按下ESC,Q,或者q,程序退出
key = (char)waitKey();
if( key == 27 || key == 'q' || key == 'Q' )
break;
}
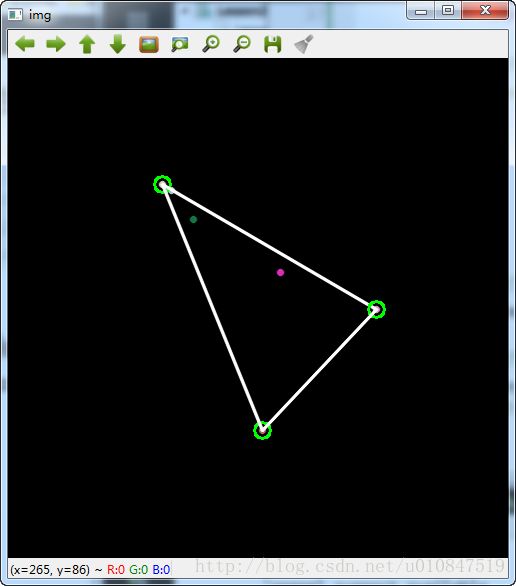
return; 运行结果
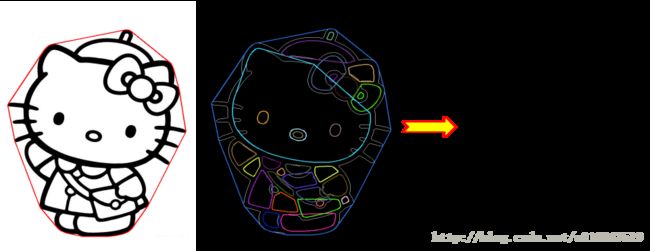
凹包二- - -轮廓的凹包
代码
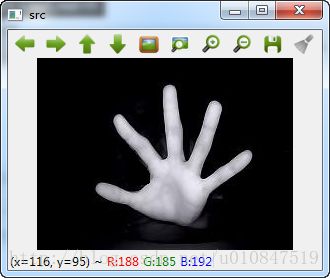
Mat srcImg = imread("D:\\1\\12.jpg");
imshow("src", srcImg);
Mat dstImg2 = srcImg.clone();
Mat tempImg(srcImg.rows, srcImg.cols, CV_8UC3, Scalar::all(0)); //用于绘制凸包
Mat dstImg(srcImg.rows, srcImg.cols, CV_8UC3, Scalar::all(0)); //用于绘制轮廓
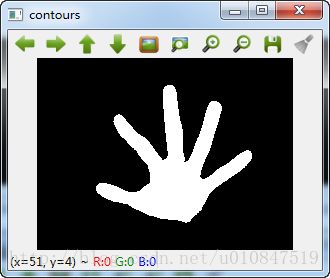
cvtColor(srcImg, srcImg, CV_BGR2GRAY);
threshold(srcImg, srcImg, 100, 255, CV_THRESH_BINARY); //二值化
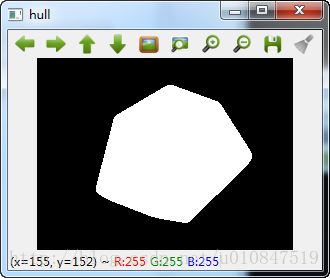
vector<vectortrue); //查找凸包
}
for(int i=0; i255, 255, 255), -1, 8); //绘制轮廓
//drawContours(dstImg, hull, i, Scalar(rand()%255, rand()%255, rand()%255), 2, 8);
drawContours(tempImg, hull, i, Scalar(255, 255, 255), -1, 8);
}
imshow("hull", tempImg);
imshow("contours", dstImg); 运行结果
原图
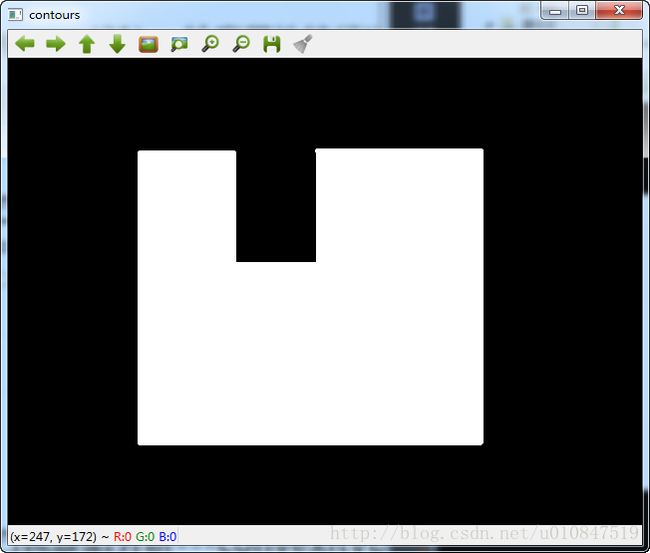
轮廓
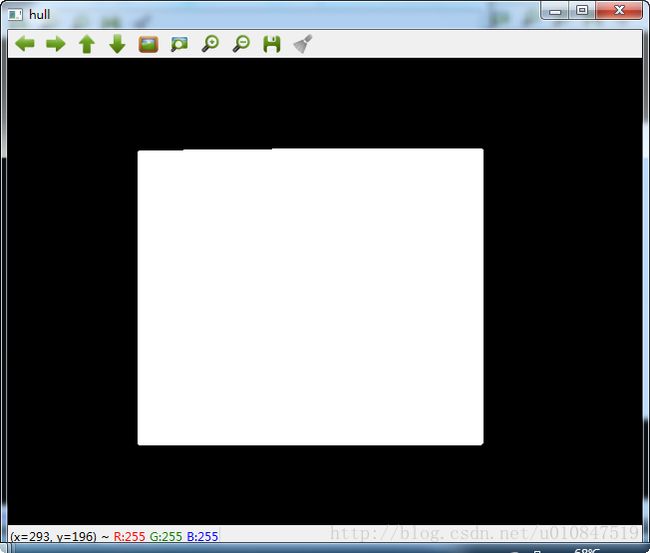
凹包
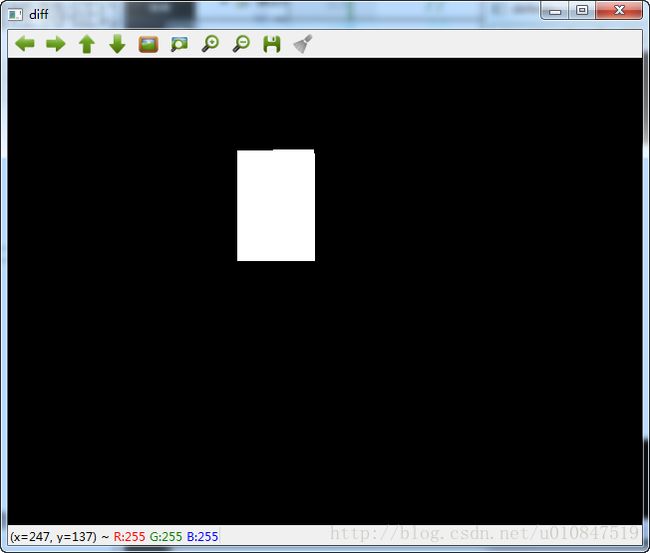
凸包与轮廓
二者是不同的两个概念,可以利用二者的差,寻找工件的瑕疵区域
Mat srcImg = imread("D:\\1\\10.png");
imshow("src", srcImg);
Mat dstImg2 = srcImg.clone();
Mat tempImg(srcImg.rows, srcImg.cols, CV_8UC3, Scalar::all(0)); //用于绘制凸包
Mat dstImg(srcImg.rows, srcImg.cols, CV_8UC3, Scalar::all(0)); //用于绘制轮廓
cvtColor(srcImg, srcImg, CV_BGR2GRAY);
threshold(srcImg, srcImg, 100, 255, CV_THRESH_BINARY); //二值化
vector<vectortrue); //查找凸包
}
for(int i=0; i255, 255, 255), -1, 8); //绘制轮廓
//drawContours(dstImg, hull, i, Scalar(rand()%255, rand()%255, rand()%255), 2, 8);
drawContours(tempImg, hull, i, Scalar(255, 255, 255), -1, 8);
}
imshow("hull", tempImg);
imshow("contours", dstImg);
Mat diffImg;
absdiff(tempImg, dstImg, diffImg); //图像相减
//通过对图像进行腐蚀,来去除边缘的一些区域
Mat element = getStructuringElement(MORPH_RECT, Size(3, 3), Point(-1, -1));
erode(diffImg, diffImg, element);
imshow("diff", diffImg);
vector<vector 运行结果

凸包缺陷分析—convexityDefects()
函数原型

- contour: 表示输入参数检测到的轮廓, 可以用findContours函数获得
- convexhull: 输入参数表示检测到的凸包, 可以用convexHull函数获得
- convexityDefects: 检测到的最终结果, 应为vector