ROS学习(二)基础功能包
tf坐标变换
首先安装tf功能包
sudo apt-get install ros-melodic-trtle-tf
运行tf功能包demo
roslaunch turtle_tf turtle_tf_demo.launch
运行键盘节点rosrun turtlesim turtle_teleop_key
可观察到出现两只海龟,其中一只跟随始终跟随第一只位置变化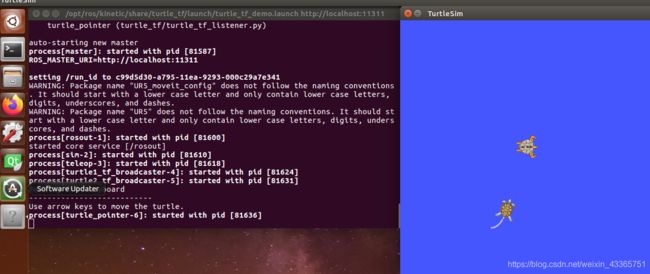
观察tf坐标系关系
1、运行rosrun tf view_frames,生成tf可视化工具生成pdf文件,保存在当前目录,如图体现三个坐标系
turtle1坐标系,world坐标系,turtle2坐标系位置关系

2、rosrun tf tf_echo turtle1 turtle2
可观察到实时姿态,包括位置信息和旋转信息
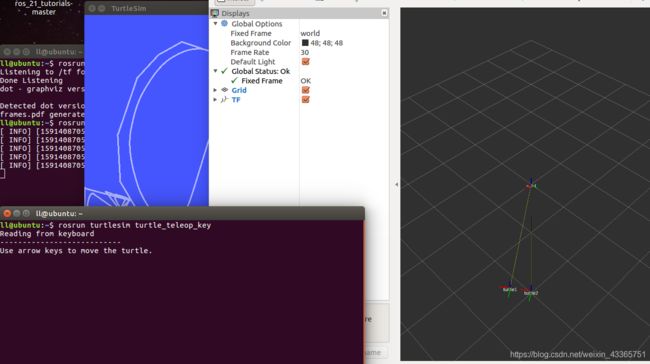
3、利用rviz可视化工具观察坐标变换
rosrun rviz rviz -d ‘rospack find turtle_tf’/rviz/turtle_rviz.rviz
tf坐标系监听与广播编程实现
创建tf功能包
catkin_create pkg learning_tf roscpp rospy turtlesim tf
创建tf广播器代码
#include创建tf监听器代码
#include配置tf广播器与监听器代码编译规则
add_executable(turtle_tf_broadcaster src/turtle_tf_broadcaster.cpp)
target_link_libraries(turtle_tf_broadcaster ${catkin_LIBRARIES})
add_executable(turtle_tf_listener src/turtle_tf_listener.cpp)
target_link_libraries(turtle_tf_listener ${catkin_LIBRARIES})
使用catkin_make编译工作空间
编译运行
roscore
rosrun turtlesim turtlesim_node
rosrun learning_tf turtle_tf_broadcaster__name:=turtle1_tf_broadcaster /turtle1
rosrun learning_tf turtle_tf_broadcaster__name:=turtle2_tf_broadcaster /turtle2
rosrun learning_tf turtle_tf_listener
rosrun turtlesim turtle_teleop_key
launch文件语法
launch文件中的根元素采用标签定义
启动节点

pkg:节点所在功能包名称
type:节点的可执行文件名称
name:节点运行时的名称
output:打印节点日志信息到当前终端
respawn:控制节点挂掉自动重启
required:某个节点必须启动
ns:命名空间,避免命名冲突
args:给节点输入参数
参数设置


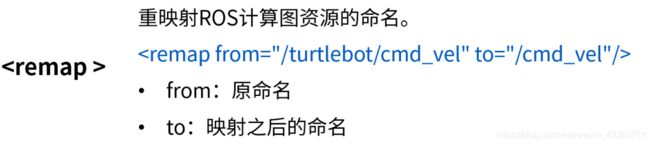
重映射
嵌套

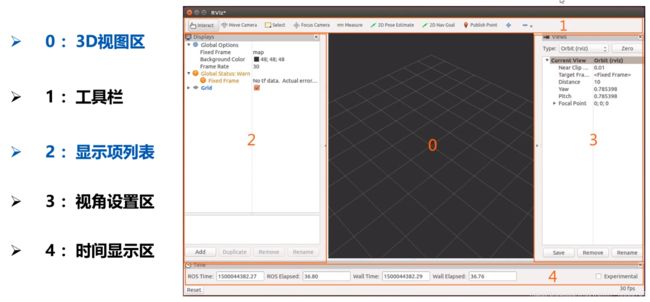
Rviz