1、OpenCV轮廓检测和填充
openCV函数cvFindContours二值图像中检索轮廓
int cvFindContours( void* img, CvMemStorage* storage, CvSeq** firstContour,int cntHeaderSize, int mode, int method, CvPoint offset );
函数cvFindContours从二值图像中检索轮廓(检测二值图的白色轮廓),并返回检测到的轮廓的个数。first_contour的值由函数填充返回,它的值将为第一个外轮廓的指针,当没有轮廓被检测到时为NULL。其它轮廓可以使用h_next和v_next连接,从first_contour开始。
百度释意:
image
8比特单通道的源二值图像。非零像素作为1处理,0像素保存不变。从一个灰度图像得到二值图像的函数有:cvThreshold,cvAdaptiveThreshold和cvCanny。
storage
返回轮廓的容器。
first_contour
输出参数,用于存储指向第一个外接轮廓。
header_size
header序列的尺寸.如果选择method = CV_CHAIN_CODE, 则header_size >= sizeof(CvChain);其他,则header_size >= sizeof(CvContour)。
mode
CV_RETR_EXTERNAL:只检索最外面的轮廓;
CV_RETR_LIST:检索所有的轮廓,并将其放入list中;
CV_RETR_CCOMP:检索所有的轮廓,并将他们组织为两层:顶层是各部分的外部边界,第二层是空洞的边界;
CV_RETR_TREE:检索所有的轮廓,并重构嵌套轮廓的整个层次。
蓝色表示v_next,绿色表示h_next
method
边缘近似方法(除了CV_RETR_RUNS使用内置的近似,其他模式均使用此设定的近似算法)。可取值如下:
CV_CHAIN_CODE:以Freeman链码的方式输出轮廓,所有其他方法输出多边形(顶点的序列)。
CV_CHAIN_APPROX_NONE:将所有的连码点,转换成点。
CV_CHAIN_APPROX_SIMPLE:压缩水平的、垂直的和斜的部分,也就是,函数只保留他们的终点部分。
CV_CHAIN_APPROX_TC89_L1,CV_CHAIN_APPROX_TC89_KCOS:使用the flavors of Teh-Chin chain近似算法的一种。
CV_LINK_RUNS:通过连接水平段的1,使用完全不同的边缘提取算法。使用CV_RETR_LIST检索模式能使用此方法。
offset
偏移量,用于移动所有轮廓点。当轮廓是从图像的ROI提取的,并且需要在整个图像中分析时,这个参数将很有用。
讨论部分cvDrawContours中的案例显示了任何使用轮廓检测连通区域。轮廓可以用于形状分析和目标识别——可以参考文件夹OpenCV sample中的squares.c
OpenCV1.0版本例子
#include "stdafx.h"
#include "cv.h"
#include "highgui.h"
#include "cxcore.h"
int main(int argc, char* argv[])
{
IplImage* src;
int area;
src=cvLoadImage("E:\\grayimage.jpg",0); //加载并显示原始灰度图像
cvNamedWindow( "PIC", 1);
cvShowImage("PIC",src);
IplImage* dst = cvCreateImage(cvGetSize(src), 8, 3 ); //申请三通道的目标图像
int num=0;
int count=0;
CvMemStorage* storage =cvCreateMemStorage(0);
CvSeq* contour = 0;
cvThreshold( src, src, 100,255.0,CV_THRESH_BINARY ); //二值化
cvFindContours( src, storage,&contour, sizeof(CvContour), CV_RETR_CCOMP, CV_CHAIN_APPROX_SIMPLE );//二值图轮廓检索;
cvZero( dst );
//遍历每个轮廓
for( ; contour != 0; contour =contour->h_next )
{
//获取当前轮廓面积,并用随即颜色填充
area= int(fabs(cvContourArea( contour, CV_WHOLE_SEQ ))); //获取当前面积
num=num+area;
count=count+1;
printf("%d:area== %d\n", count,area);
CvScalar color = CV_RGB(rand()&255, rand()&255, rand()&255 ); //随即颜色
cvDrawContours( dst, contour,color, color, -1, CV_FILLED, 8 ); //随即颜色填充
}
printf("num == %d\n",num);
printf("rectarea:%d",src->width*src->height);
cvNamedWindow("Components", 1 );
cvShowImage("Components", dst );
cvWaitKey(0);
return 0;
}原图:

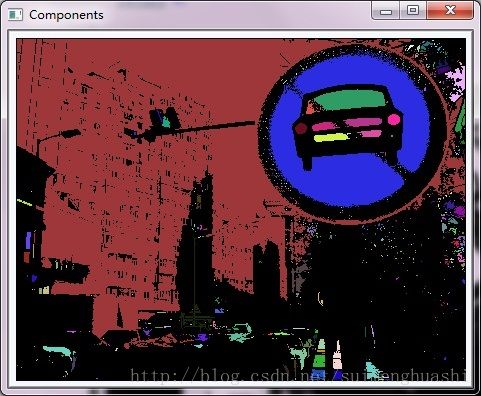
结果图: