IIC总线--基础知识及应用
1 IIC总线概述
I2C总线两线制包括:串行数据SDA(Serial Data)、串行时钟SCL(Serial Clock)。总线必须由主机(通常为微控制器)控制,主机产生串行时钟(SCL)控制总线的传输方向,并产生起始和停止条件。
IIC总线特征:同步串行半双工(同一时刻只能是一种身份)
2 IIC总线拓扑图

SDA:双向串行数据线,数据是一位一位传输,既可以从主机发送到从机,也可以从从机发送到主机
SCL:时钟线(单向),驱动数据线SDA的信号由时钟线SCL提供,只能由主机发送,从机接收
主机:主机产生串行时钟(SCL)控制总线的传输方向,并产生起始条件(占用总线)和停止条件(释放总线)
从机:从机也能发送数据给主机,但是从机永远不会主动给主机发送数据。
2.1 主从设备通信
主机如何能找到对应的从机与其进行通信?
每个从机都有一个唯一的器件地址,主机就是通过这个器件地址去找到对应的从机与其通信。
器件地址谁分配?如何分配?(具体查看模块手册)
在IIC总线上,从机的器件地址可以为7位或者10位,一般情况下都是7位器件地址。
在器件地址中包含了固定地址(在高位,不可变)和可编程地址(在低位,可变)
器件地址的位数是由厂家决定
固定地址的位数和内容也是由厂家决定
可编程地址的位数由厂家决定
可编程地址的内容由使用者决定

3 IIC数据帧

IC数据帧格式:起始条件+数据位(8位)+应答位+停止条件
起始条件:一次通信的开始(主机占用总线)
数据位:从发送器到接收器,连续的8位数据
应答位:当接收器成功接收到发送器的8位数据后,必须应答。0代表应答,1代表非应答。
停止条件:一次通信的结束(主机释放总线,双线电平拉高)
4 标准IIC协议
空闲状态
开始信号
停止信号
应答信号
数据的有效性
数据传输
4.1 空闲状态(都拉高,数据比时钟快)
空闲状态:此时各个器件的输出级场效应管均处在截止状态,即释放总线,由两条信号线各自的上拉电阻把电平拉高。
4.2 起始条件(CD高D变低)和停止信号(C高D变高)

起始信号:当SCL为高期间,SDA由高到低的跳变;启动信号是一种电平跳变时序信号,而不是一个电平信号。
停止信号:当SCL为高期间,SDA由低到高的跳变;停止信号也是一种电平跳变时序信号,而不是一个电平信号。
起始条件伪代码
SCL=1
SDA=1 //起始前都是高电平
//延时,起始条件建立时间
SDA=0//SDA变低,产生起始条件
//延时,起始条件的保持时间
SCL=0//一个周期的结束
停止条件伪代码
SCL=1
SDA=0//低
//延时,停止条件建立时间
SDA=1//SDA变高 产生停止条件
//延时,本次停止条件到下一个起始条件的时间间隔
4.3 位传输(C低D准备数据,C拉高读取D)
SCL串行时钟的配合下,在SDA上逐位地串行传送每一位数据。数据的准备是在SCL的低电平,数据位的传输是上边沿触发。
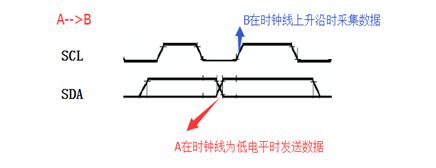
SCL拉低SDA准备数据,SCL拉高SDA采集数据
主机发送一位数据给从机:(主机输出)
SCL=0//主机拉低时钟线
SDA=0/1//主机在总线上准备数据
//延时,让数据稳定在数据线上
SCL=1//主机拉高时钟线
从机在时钟上升沿从总线上采集数据
//延时,给时间从机采集数据
主机读取从机发送的一位数据:(主机输入)
SCL=0//主机拉低时钟线
从机在总线上准备数据(从机自动进行,主机不动作)
//延时,让数据稳定在数据线上
SCL=1//主机拉高时钟线
主机读取SDA//主机在时钟上升沿从总线上采集数据
//延时,给时间主机机采集数据
4.4 应答位(第九位发送高(不应答)低(应答))

发送器每发送一个字节,就在时钟脉冲9期间释放数据线,由接收器反馈一个应答信号。
应答信号为低电平时,规定为有效应答位(ACK简称应答位),表示接收器已经成功地接收了该字节;
应答信号为高电平时,规定为非应答位(NACK),一般表示接收器接收该字节没有成功
主机读取从机的应答:(主机读取一位数据)
主机每发送1个字节给从机后,都必须通过这个应答位查看从机是否能正常收到,如果一旦读到的是非应答信号(‘1’),表明没有正常接收到当前字节数据,通信就要终止(主机发送停止信号)
SCL=0//主机拉低时钟线 (还是拉低给数据,拉高采集数据)
从机根据自己接受的情况,给不给主机应答信号
//延时,让数据稳定在数据线上
SCL=1//主机拉高时钟线
主机读取SDA//主机在时钟上升沿从总线上采集应答信号
//延时,给时间主机机采集数据
如果采集到的0,表示有应答,如果采集到的是1,表示非应答
主机发送一个应答给从机:(主机发送一位数据)
主机每读取完从机发送过来的一个字节数据后,都必须给从机一个应答信号。如果主机读取完当前字节后还想从机继续给它发下一个字节数据,就要给从机应答(‘0’),如果主机读取完当前字节后不想从机再给它发数据,那么主机发送非应答信号(‘1’)给从机。
SCL=0//主机拉低时钟线
SDA=0/1//主机根据自己的情况,决定给不给应答从机
//延时,让数据稳定在数据线上
SCL=1//主机拉高时钟线
从机在时钟上升沿从总线上采集应答位
//延时,给时间从机采集数据
4.5 IIC延时根据
假如知道是400KHz最大值,400KHz,意味着数据是800KHz。那么一个命令或数据需要的时间是1.25um。延时的目的是,一个IIC外设命令到下一个命令之间,要有大概一个信号跳变间隔咯?
100KHZ意味着数据是200KHZ。需要延时5um
IIC传输位速率在标准模式下可达100Kbit/s,快速模式下可达400Kbit/s,高速模式下可达3.4Mbit/s;也可以理解为时钟频率在标准模式下可达100kHz,快速模式下可达400kHz,高速模式下可达3.4MHz。
5 IIC的寻址方式
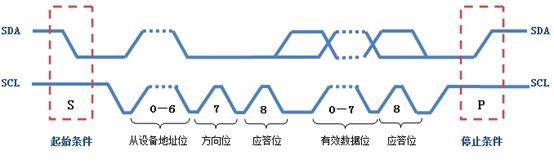
器件地址(8位)组成:7位从设备地址+1位方向位
从设备地址包含了固定地址和可编程地址
方向位决定有效数据位的传输方向,主机—》从机(主机写) 还是 从机----》主机(主机读)
5.1 IIC一次完整通信
- 主机发送起始条件(主机占用总线,唤醒总线所有的从机)
- 主机发送器件地址(总线上所有的从机就会拿这个器件跟自身进行比较,匹配成功的那个从机就会回复一个应答信号给主机,并根据方向位来决定数据传输方向)
- 进行有效数据交流(每传输完一个直接数据都要给应答)
- 主机发送停止信号(释放总线,结束本次通信)
5.2 IIC三种通信方式
只读:主机只读取数据

只写:主机仅发送数据

有读有写

6 GPIO口模拟IIC通信协议 (STM32F407)
GPIO初始化
作为SCL的GPIO口:时钟线SCL只能由主机(MCU)发出,SCL既有低电平也有高电平,所以这个GPIO口可以配置成推挽输出,另外总线结构本来就有上拉电阻,所以也可以配置成开漏输出。
作为SDA的GPIO口:数据线SDA是双向的,有时候需要从MCU发送,有时候又要输入到MCU里。刚好,在M4里面,当GPIO口配置成输出模式时,输入电路并没有被关闭。但是,当在采集输入信号的时候,IO口的输出电路就很有可能会影响到输入信号的采集,所以必须要配置成开漏输出,在读取输入信号前输出‘1’,目的是让输出电路从IO口中断开。
准备数据要延时,读取数据也要延时
起始条件
void IIC_Start(void)
{
IIC_SCL=1;
IIC_SDA_OUT=1;
Systick_Delay_us(1);//延时,起始条件建立时间
IIC_SDA_OUT=0;//产生起始条件
Systick_Delay_us(2);//延时,起始条件的保持时间
IIC_SCL=0;//一个周期的结束
}
停止条件
void IIC_Stop(void)
{
IIC_SCL=1;
IIC_SDA_OUT=0;
Systick_Delay_us(1);//延时,停止条件建立时间
IIC_SDA_OUT=1;//产生停止条件
Systick_Delay_us(1);//延时,本次停止条件到下一个起始条件的时间间隔
}
主机发送应答
void IIC_Send_ACK(u8 ack)
{
IIC_SCL=0;//主机拉低时钟线
if(ack)//主机根据自己的情况,决定给不给应答从机
{
IIC_SDA_OUT=1;
}
else
{
IIC_SDA_OUT=0;
}
Systick_Delay_us(2);//延时,让数据稳定在数据线上
IIC_SCL=1;//主机拉高时钟线,从机在时钟上升沿从总线上采集应答位
Systick_Delay_us(1);//延时,给时间从机采集数据
}
主机读取应答
u8 IIC_Revice_Ack(void)
{
u8 ack=0;
IIC_SCL=0;//主机拉低时钟线
IIC_SDA_OUT=1;//切换成读模式---让输出电路从IO口断开
//从机根据自己接受的情况,给不给主机应答信号
Systick_Delay_us(2);//延时,让数据稳定在数据线上
IIC_SCL=1;//主机拉高时钟线
if(IIC_SDA_IN)//主机在时钟上升沿从总线上采集应答信号
{
ack=1;
}
Systick_Delay_us(1);//延时,给时间主机机采集数据
IIC_SCL=0;//完整周期
return ack;
}
主机发送一个字节数据给从机
u8 IIC_Send_Byte(u8 data)
{
u8 i;
for(i=0;i<8;i++)
{
IIC_SCL=0;//主机拉低时钟线
//主机在总线上准备数据
if(data&0x80) IIC_SDA_OUT=1;
else IIC_SDA_OUT=0;
Systick_Delay_us(2);//延时,让数据稳定在数据线上
IIC_SCL=1;//主机拉高时钟线
//从机在时钟上升沿从总线上采集数据
Systick_Delay_us(1);//延时,给时间从机采集数据
data<<=1;//让次高位成为最高位
}
return IIC_Revice_Ack( );
}
主机读取从机的一个字节数据
u8 IIC_Revice_Byte(u8 ack)
{
u8 i;
u8 data=0;
for(i=0;i<8;i++)
{
IIC_SCL=0;//主机拉低时钟线
IIC_SDA_OUT=1;//切换成读模式---让输出电路从IO口中断开
//从机在总线上准备数据
Systick_Delay_us(2);//延时,让数据稳定在数据线上
IIC_SCL=1;//主机拉高时钟线
data<<=1;//空出最低位来接受数据
//主机在时钟上升沿从总线上采集数据
if(IIC_SDA_IN)
{
data |=1;
}
Systick_Delay_us(1);//延时,给时间主机机采集数据
}
IIC_Send_ACK(ack);
return data;
}
7 IIC驱动温湿度传感器

7.1 SHT20命令

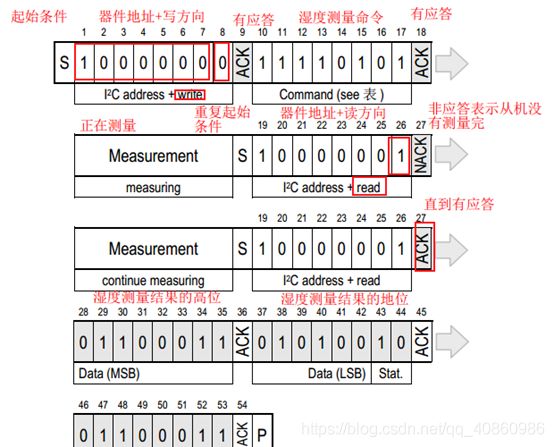
7.2 SHT20测量时序
7.3 demo
float Read_SHT20_Data(u8 cmd)
{
u8 ack;
u16 data=0;
float DATA;
IIC_Start( );//起始信号
ack = IIC_Send_Byte(SHT20_ADDR&0XFE);//发送器件地址+写方向
if(ack)//没有应答
{
IIC_Stop( );
return -1;
}
ack = IIC_Send_Byte(cmd);//发送测量命令
if(ack)//没有应答,等待从机应答
{
IIC_Stop( );
return -1;
}
do
{
Delay_ms(10);//给时间测量
IIC_Start( ); //开始信号,测量中
ack = IIC_Send_Byte(SHT20_ADDR | 0x01);//发送器件地址+读方向
}while(ack);//没有应答则继续询问,知道有应答,表明测量结束
data |= IIC_Revice_Byte(0) <<8;//高位结果
data |= IIC_Revice_Byte(1) ; //低位结果
IIC_Stop( );
//------数字信号转换成模拟信号
data &=0xFFFC;//清除两位状态位
if(cmd==T_MEASURE)
{
DATA=-46.85+175.72*data/65536.0;
}
else if(cmd==RH_MEASURE)
{
DATA=-6.0+125.0*data/65536.0;
}
return DATA;
}