强化学习(Reinforcement Learning)学习笔记DAY01(RL分类和Q Learning简单例子)
分类
可以把所有的强化学习分成两类:Model-Free RL和Model-Based RL。
还可以分成以下两类:基于概率(Policy-Based RL)和基于价值(Value-Baesd RL)。
还有另外一种分类:回合更新(Monte-Carlo update)和单步更新(Temporal-Difference update)。
要说的最后一种分类:在线学习(On-Policy)、离线学习(Off-Policy)。
Model-Based与Model-Free
可参考https://blog.csdn.net/broadview2006/article/details/100556095
Model-Based能通过想象来预判接下来遇到的所有情况。然后根据想象中的情况选择最好的那种,并根据这种情况采取下一步的策略。
Model-free类似黑盒,整个Model是未知的,只能按部就班,一步一步等待真实世界的反馈来设置学习策略,进行下一步行动。
Policy-Based RL和Value-Baesd RL
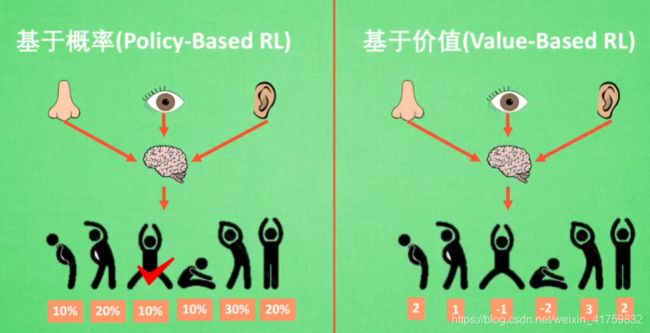
连续的动作不能用基于价值的方法来做。
Policy-Based RL方法:Policy Gradients。
Value-Baesd RL方法:Q Learning、Sarsa。
结合两种的方法:Actor-Critic。
Actor会基于概率做出动作,Critic会对于做出的动作给出动作的价值。
Monte-Carlo update和Temporal-Difference update
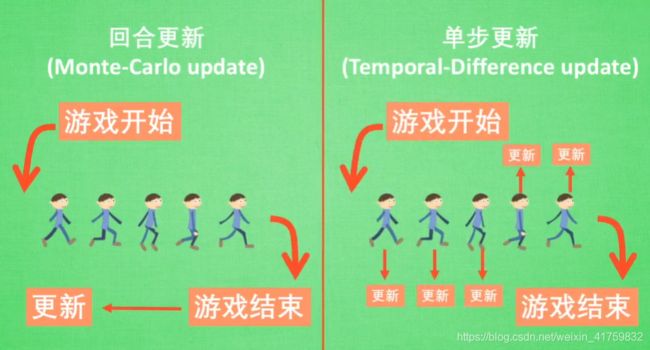
Monte-Carlo update指的是游戏开始后到游戏结束,总结回合中所有的转折点,再更新我们的行为准则。
方法:基础版Policy Gradiente、Monte-Carlo learning。
Temporal-Difference update指的是在游戏过程中每一步都在更新,不用等待游戏的结束,便可以边玩边学习了。
方法:升级版Policy Gradiente、Q learning、Sarsa。
On-Policy和Off-Policy
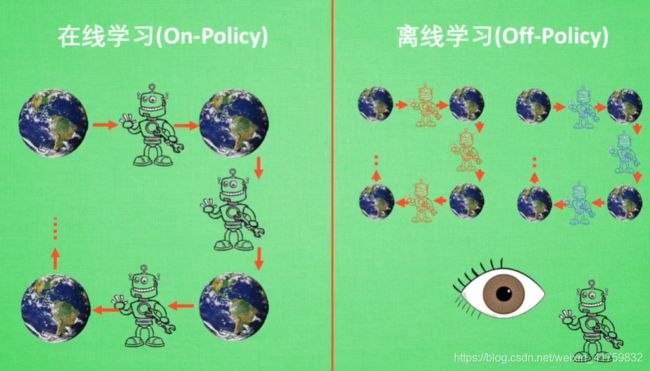
所谓的在线学习就是必须本人在场,而且必须是本人边玩边学习。离线学习则是可以自己玩也可以看着别人玩。
On-Policy方法:Sarsa、Sarsa(λ)。
Off-Policy方法:Q Learning、Deep Q Network。
Q Learning
Q Learning算法:
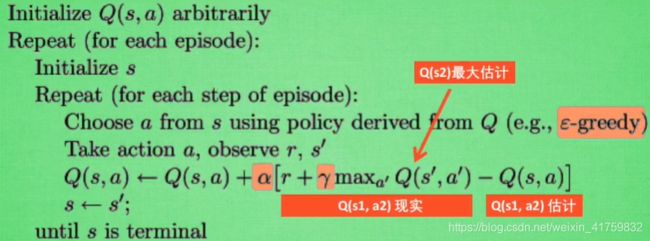
参数意义:
 -greedy是用在决策上的一种策略,等于0.9时就说明90%的情况会按照Q表的最优值来选择行为,10%的情况选择随机行为。
-greedy是用在决策上的一种策略,等于0.9时就说明90%的情况会按照Q表的最优值来选择行为,10%的情况选择随机行为。- α是学习效率,来决定这一次的误差有多少要学习。
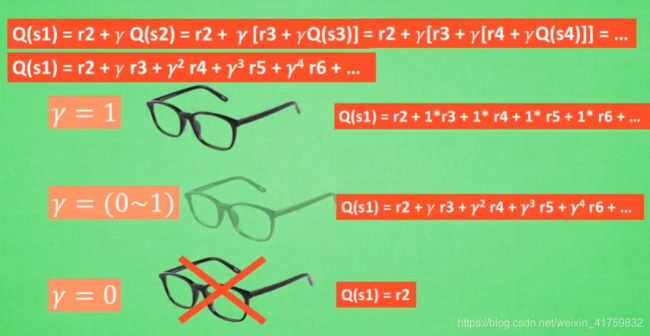
- γ是对未来的衰减值。
Q Learning简单例子
根据以上算法写代码:
import numpy as np
import pandas as pd
import time
np.random.seed(2) #产生一组伪随机数列,每次运行随机过程都是一样的
N_STATES = 6 # 离宝藏的距离有多少步
ACTIONS = ['left', 'right'] # 两个动作(左+右)
EPSILON = 0.9 # 0.9最优动作+0.1随机动作
ALPHA = 0.1 # learning rate
GAMMA = 0.9 # discount factor
MAX_EPISODES = 13 # maximum episodes 只玩13回合
FRESH_TIME = 0.01 # fresh time for one move 走一步花的时间有多长
def build_q_table(n_states, actions):
table = pd.DataFrame(
np.zeros((n_states, len(actions))), # q_table initial values
columns=actions, # actions's name
)
print(table)
return table
def choose_action(state, q_table):
# This is how to choose an action
state_actions = q_table.iloc[state, :]
if (np.random.uniform() > EPSILON) or ((state_actions == 0).all()): # act non-greedy or state-action have no value
action_name = np.random.choice(ACTIONS)
else: # act greedy
action_name = state_actions.idxmax() # replace argmax to idxmax as argmax means a different function in newer version of pandas
return action_name
def get_env_feedback(S, A): #获得行为奖励R和下一个state
# This is how agent will interact with the environment
if A == 'right': # move right
if S == N_STATES - 2: # terminate
S_ = 'terminal'
R = 1
else:
S_ = S + 1
R = 0
else: # move left
R = 0
if S == 0:
S_ = S # reach the wall
else:
S_ = S - 1
return S_, R
def update_env(S, episode, step_counter): #建立环境,没必要具体看
# This is how environment be updated
env_list = ['-']*(N_STATES-1) + ['T'] # '---------T' our environment
if S == 'terminal':
interaction = 'Episode %s: total_steps = %s' % (episode+1, step_counter)
print('\r{}'.format(interaction), end='')
time.sleep(2)
print('\r ', end='')
else:
env_list[S] = 'o'
interaction = ''.join(env_list)
print('\r{}'.format(interaction), end='')
time.sleep(FRESH_TIME)
def rl():
# main part of RL loop
q_table = build_q_table(N_STATES, ACTIONS) #创建qtable
for episode in range(MAX_EPISODES):
step_counter = 0
S = 0 #初始状态
is_terminated = False #是否为终止符
update_env(S, episode, step_counter) #更新环境
while not is_terminated:
A = choose_action(S, q_table) #根据初始state选择action
S_, R = get_env_feedback(S, A) #获得行为奖励R和下一个state
q_predict = q_table.loc[S, A] #估计值
if S_ != 'terminal':
q_target = R + GAMMA * q_table.iloc[S_, :].max() #真实值
else:
q_target = R # next state is terminal
is_terminated = True #回合终止后没有下一个的qnext,改为终止跳出循环
q_table.loc[S, A] += ALPHA * (q_target - q_predict) # update
S = S_ # move to next state
update_env(S, episode, step_counter+1) #探索者走了每一步再更新环境
step_counter += 1
return q_table
if __name__ == "__main__":
q_table = rl()
print('\r\nQ-table:\n')
print(q_table)
运行结果如下:

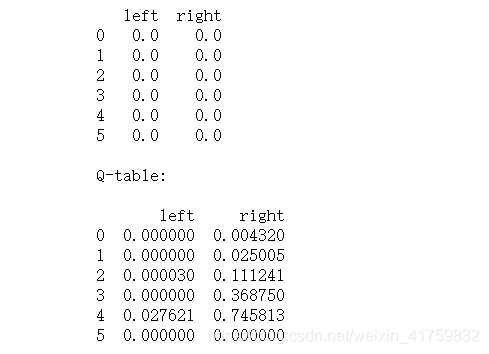
可见qtable的左边都是比右边要小的,因为有90%概率选到朝右走的值。