粒子滤波
%在二维空间,假设运动物体的一组(非线性)运动位置、速度、加速度数据,用粒子滤波方法进行处理
%实验室的博客
% 参数设置
N = 100; %粒子总数
Q = 5; %过程噪声
R = 5; %测量噪声
T = 10; %测量时间
theta = pi/T; %旋转角度
distance = 80/T; %每次走的距离
WorldSize = 100; %世界大小
X = zeros(2, T); %存储系统状态
Z = zeros(2, T); %存储系统的观测状态
P = zeros(2, N); %建立粒子群
PCenter = zeros(2, T); %所有粒子的中心位置
w = zeros(N, 1); %每个粒子的权重
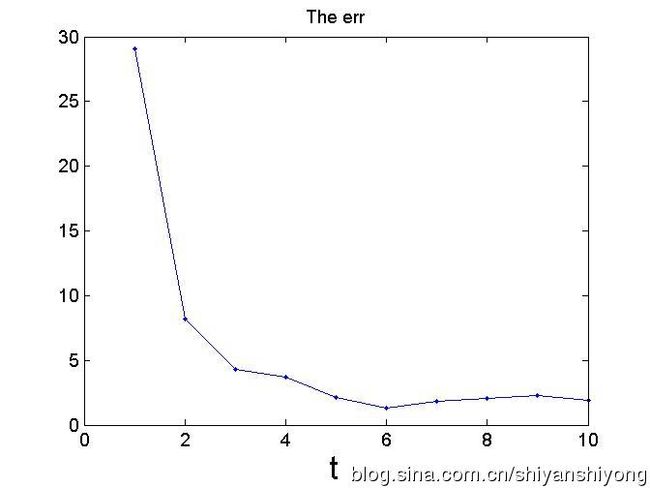
err = zeros(1,T); %误差
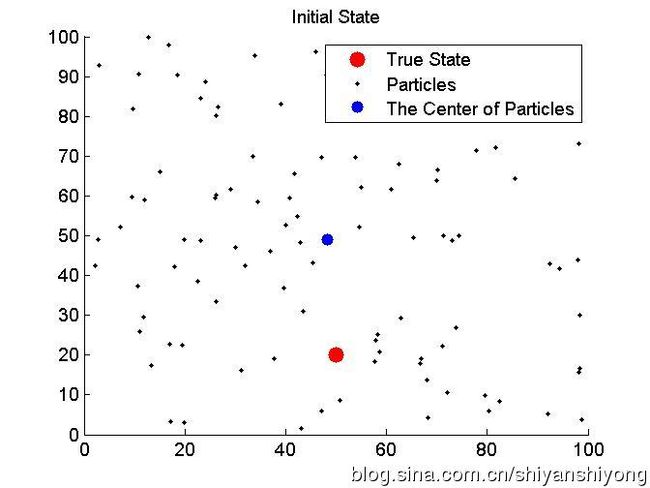
X(:, 1) = [50; 20]; %初始系统状态
Z(:, 1) = [50; 20] + wgn(2, 1, 10*log10(R)); %初始系统的观测状态
%初始化粒子群
for i = 1 : N
P(:, i) = [WorldSize*rand; WorldSize*rand];
dist = norm(P(:, i)-Z(:, 1)); %与测量位置相差的距离
w(i) = (1 / sqrt(R) / sqrt(2 * pi)) * exp(-(dist)^2 / 2 / R); %求权重
end
PCenter(:, 1) = sum(P, 2) / N; %所有粒子的几何中心位置
%%
err(1) = norm(X(:, 1) - PCenter(:, 1)); %粒子几何中心与系统真实状态的误差
figure(1);
set(gca,'FontSize',12);
hold on
plot(X(1, 1), X(2, 1), 'r.', 'markersize',30) %系统状态位置
axis([0 100 0 100]);
plot(P(1, :), P(2, :), 'k.', 'markersize',5); %各个粒子位置
plot(PCenter(1, 1), PCenter(2, 1), 'b.', 'markersize',25); %所有粒子的中心位置
legend('True State', 'Particles', 'The Center of Particles');
title('Initial State');
hold off
%%
%开始运动
for k = 2 : T
%模拟一个弧线运动的状态
X(:, k) = X(:, k-1) + distance * [(-cos(k * theta)); sin(k * theta)] + wgn(2, 1, 10*log10(Q)); %状态方程
Z(:, k) = X(:, k) + wgn(2, 1, 10*log10(R)); %观测方程
%粒子滤波
%预测
for i = 1 : N
P(:, i) = P(:, i) + distance * [-cos(k * theta); sin(k * theta)] + wgn(2, 1, 10*log10(Q));
dist = norm(P(:, i)-Z(:, k)); %与测量位置相差的距离
w(i) = (1 / sqrt(R) / sqrt(2 * pi)) * exp(-(dist)^2 / 2 / R); %求权重
end
%归一化权重
wsum = sum(w);
for i = 1 : N
w(i) = w(i) / wsum;
end
%重采样(更新)
for i = 1 : N
wmax = 2 * max(w) * rand; %另一种重采样规则
index = randi(N, 1);
while(wmax > w(index))
wmax = wmax - w(index);
index = index + 1;
if index > N
index = 1;
end
end
P(:, i) = P(:, index); %得到新粒子
end
PCenter(:, k) = sum(P, 2) / N; %所有粒子的中心位置
%计算误差
err(k) = norm(X(:, k) - PCenter(:, k)); %粒子几何中心与系统真实状态的误差
figure(2);
set(gca,'FontSize',12);
clf;
hold on
plot(X(1, k), X(2, k), 'r.', 'markersize',50); %系统状态位置
axis([0 100 0 100]);
plot(P(1, :), P(2, :), 'k.', 'markersize',5); %各个粒子位置
plot(PCenter(1, k), PCenter(2, k), 'b.', 'markersize',25); %所有粒子的中心位置
legend('True State', 'Particle', 'The Center of Particles');
hold off
pause(0.1);
end
%%
figure(3);
set(gca,'FontSize',12);
plot(X(1,:), X(2,:), 'r', Z(1,:), Z(2,:), 'g', PCenter(1,:), PCenter(2,:), 'b-');
axis([0 100 0 100]);
legend('True State', 'Measurement', 'Particle Filter');
xlabel('x', 'FontSize', 20); ylabel('y', 'FontSize', 20);
%%
figure(4);
set(gca,'FontSize',12);
plot(err,'.-');
xlabel('t', 'FontSize', 20);
title('The err');