论文:(FPN特征金字塔)Feature Pyramid Networks for Object Detection
论文链接:https://arxiv.org/pdf/1612.03144.pdf
代码:https://www.jianshu.com/p/324af87a11a6
参考1:https://blog.csdn.net/u014380165/article/details/72890275
参考2:https://www.cnblogs.com/sdu20112013/p/11050746.html
参考3:http://baijiahao.baidu.com/s?id=1573880406893170&wfr=spider&for=pc
小目标检测很难,为什么难.想象一下,两幅图片,尺寸一样,都是拍的红绿灯,但是一副图是离得很近的拍的,一幅图是离得很远的拍的,红绿灯在图片里只占了很小的一个角落,即便是对人眼而言,后者图片中的红绿灯也更难识别.
说回到cnn,不断地卷积以后,feature map的尺寸变小.这时候feature map所代表的语义信息已经很丰富了,如果绘图绘制出来,可能会看见代表的是某种形状,颜色,或更高级的更抽象的概念了.但是由于feature map尺寸减小,所以检测小目标困难.
论文概述:
作者提出的多尺度的object detection算法:FPN(feature pyramid networks)。原来多数的object detection算法都是只采用顶层特征做预测,但我们知道低层的特征语义信息比较少,但是目标位置准确;高层的特征语义信息比较丰富,但是目标位置比较粗略。另外虽然也有些算法采用多尺度特征融合的方式,但是一般是采用融合后的特征做预测,而本文不一样的地方在于预测是在不同特征层独立进行的。
论文详解:
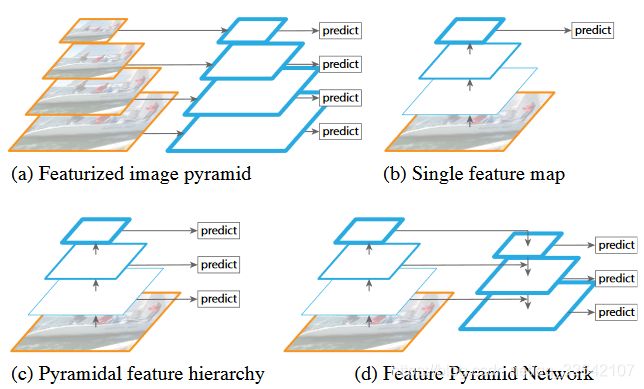
下图FIg1展示了4种利用特征的形式:
(a)图像金字塔,即将图像做成不同的scale,然后不同scale的图像生成对应的不同scale的特征。这种方法的缺点在于增加了时间成本。有些算法会在测试时候采用图像金字塔。
(b)像SPP net,Fast RCNN,Faster RCNN是采用这种方式,即仅采用网络最后一层的特征。
(c)像SSD(Single Shot Detector)采用这种多尺度特征融合的方式,没有上采样过程,即从网络不同层抽取不同尺度的特征做预测,这种方式不会增加额外的计算量。作者认为SSD算法中没有用到足够低层的特征(在SSD中,最低层的特征是VGG网络的conv4_3),而在作者看来足够低层的特征对于检测小物体是很有帮助的。
(d)本文作者是采用这种方式,顶层特征通过上采样和低层特征做融合,而且每层都是独立预测的。
如下图Fig2。上面一个带有skip connection的网络结构在预测的时候是在finest level(自顶向下的最后一层)进行的,简单讲就是经过多次上采样并融合特征到最后一步,拿最后一步生成的特征做预测。而下面一个网络结构和上面的类似,区别在于预测是在每一层中独立进行的。后面有这两种结构的实验结果对比,非常有意思,因为之前只见过使用第一种特征融合的方式。
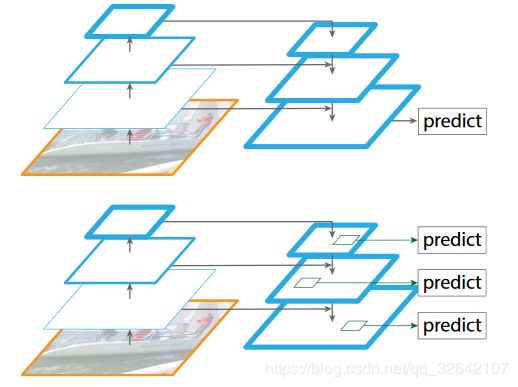
图2Top:带有跳过连接的自顶向下架构,其中预测是在最细的级别上进行的(例如,[28])。底部:我们的模型有一个类似的结构,但利用它作为一个金字塔,在各个层次独立地做出预测。
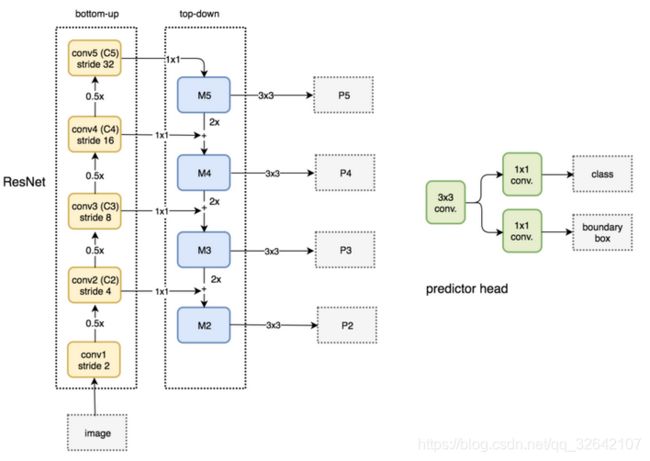
作者的主网络采用ResNet。算法大致结构如下Fig3:一个自底向上的线路,一个自顶向下的线路,横向连接(lateral connection)。图中放大的区域就是横向连接,这里1*1的卷积核的主要作用是减少卷积核的个数,也就是减少了feature map的个数,并不改变feature map的尺寸大小。
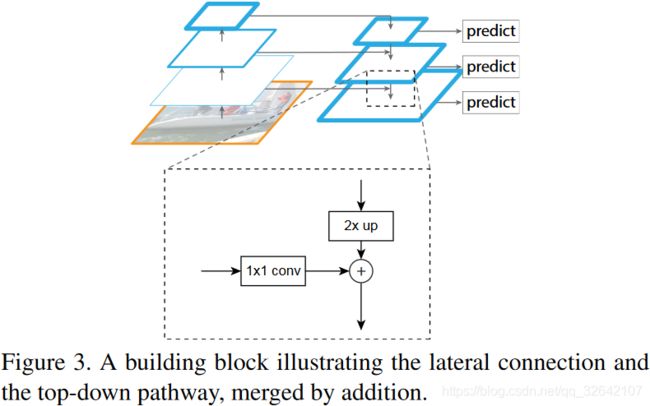
自底向上其实就是网络的前向过程。在前向过程中,feature map的大小在经过某些层后会改变,而在经过其他一些层的时候不会改变,作者将不改变feature map大小的层归为一个stage,因此每次抽取的特征都是每个stage的最后一个层输出,这样就能构成特征金字塔。
自顶向下的过程采用上采样(upsampling)进行,而横向连接则是将上采样的结果和自底向上生成的相同大小的feature map进行融合(merge)。在融合之后还会再采用3*3的卷积核对每个融合结果进行卷积,目的是消除上采样的混叠效应(aliasing effect)。并假设生成的feature map结果是P2,P3,P4,P5,和原来自底向上的卷积结果C2,C3,C4,C5一一对应。
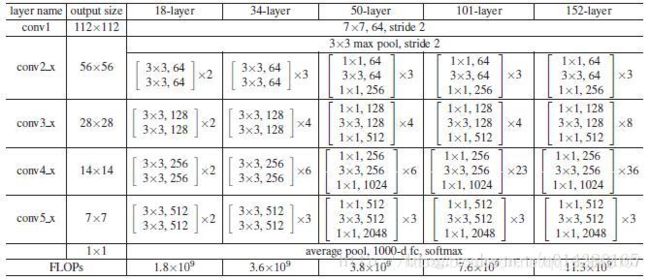
贴一个ResNet的结构图:这里作者采用Conv2,CONV3,CONV4和CONV5的输出。因此类似Conv2就可以看做一个stage。
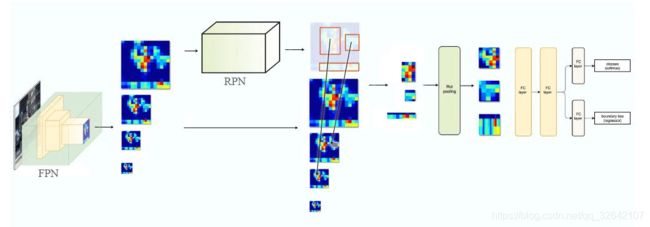
作者一方面将FPN放在RPN网络中用于生成proposal,原来的RPN网络是以主网络的某个卷积层输出的feature map作为输入,简单讲就是只用这一个尺度的feature map。但是现在要将FPN嵌在RPN网络中,生成不同尺度特征并融合作为RPN网络的输入。在每一个scale层,都定义了不同大小的anchor,对于P2,P3,P4,P5,P6这些层,定义anchor的大小为322,642,1282,2562,512^2,另外每个scale层都有3个长宽对比度:1:2,1:1,2:1。所以整个特征金字塔有15种anchor。
正负样本的界定和Faster RCNN差不多:如果某个anchor和一个给定的ground truth有最高的IOU或者和任意一个Ground truth的IOU都大于0.7,则是正样本。如果一个anchor和任意一个ground truth的IOU都小于0.3,则为负样本。
看看加入FPN的RPN网络的有效性,如下表Table1。网络这些结果都是基于ResNet-50。评价标准采用AR,AR表示Average Recall,AR右上角的100表示每张图像有100个anchor,AR的右下角s,m,l表示COCO数据集中object的大小分别是小,中,大。feature列的大括号{}表示每层独立预测。
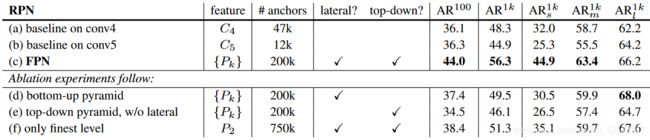
从(a)(b)(c)的对比可以看出FRN的作用确实很明显。另外(a)和(b)的对比可以看出高层特征并非比低一层的特征有效。
(d)表示只有横向连接,而没有自顶向下的过程,也就是仅仅对自底向上(bottom-up)的每一层结果做一个11的横向连接和33的卷积得到最终的结果,有点像Fig1的(b)。从feature列可以看出预测还是分层独立的。作者推测(d)的结果并不好的原因在于在自底向上的不同层之间的semantic gaps比较大。
(e)表示有自顶向下的过程,但是没有横向连接,即向下过程没有融合原来的特征。这样效果也不好的原因在于目标的location特征在经过多次降采样和上采样过程后变得更加不准确。
(f)采用finest level层做预测(参考Fig2的上面那个结构),即经过多次特征上采样和融合到最后一步生成的特征用于预测,主要是证明金字塔分层独立预测的表达能力。显然finest level的效果不如FPN好,原因在于PRN网络是一个窗口大小固定的滑动窗口检测器,因此在金字塔的不同层滑动可以增加其对尺度变化的鲁棒性。另外(f)有更多的anchor,说明增加anchor的数量并不能有效提高准确率。
另一方面将FPN用于Fast R-CNN的检测部分。除了(a)以外,分类层和卷积层之前添加了2个1024维的全连接层。细节地方可以等代码出来后再研究。
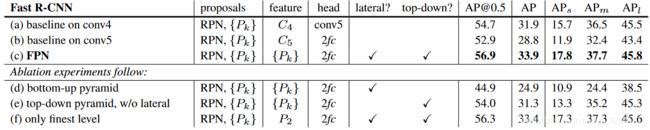
实验结果如下表Table2,这里是测试Fast R-CNN的检测效果,所以proposal是固定的(采用Table1(c)的做法)。与Table1的比较类似,(a)(b)(c)的对比证明在基于区域的目标卷积问题中,特征金字塔比单尺度特征更有效。(c)(f)的差距很小,作者认为原因是ROI pooling对于region的尺度并不敏感。因此并不能一概认为(f)这种特征融合的方式不好,博主个人认为要针对具体问题来看待,像上面在RPN网络中,可能(f)这种方式不大好,但是在Fast RCNN中就没那么明显。
同理,将FPN用于Faster RCNN的实验结果如下表Table3。


FPN with RPN
FPN本身并不是object detetcor.它只是一个feature detetor.下图显示FPN在一个object detector中的位置和作用. 每一个feature map(P2到P5)被独立地送到后续的流程完成object detection.
FPN with Fast R-CNN or Faster R-CNN
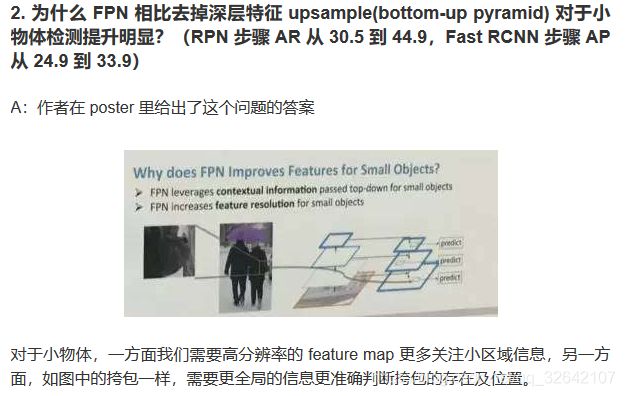
通过FPN,生成了feature map的金字塔(也就是一堆不同尺寸的特征图,都具有高级语义).然后用RPN生成ROI.然后对不同尺寸的目标,选用不同尺寸的特征图去做识别.小目标要用大尺寸的feature map. 大目标用小尺寸的feature map.很好理解,目标很小,你再用小尺寸(低分辨率)的feature map,肯定更难看清目标了.