利用matlab实现扩展卡尔曼滤波(EKF)与无迹卡尔曼滤波(UKF)
例题
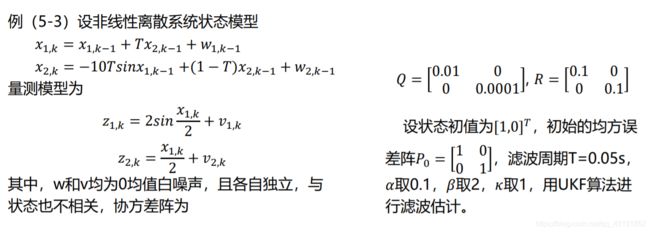
将下例进行EKF和UKF代码实现,进行仿真复现。
EKF算法模型

clc;
clear;
%测量值模拟
T=0.05;%滤波周期
T_go=10;%滤波时间
N=T_go/T;%观测次数
t=0:T:T_go-T;%假定输出序列(供画图用)
x=zeros(2,N);
z=zeros(2,N);
x(:,1)=[1;0];%真值初始值
mu=[0;0];
Q=[0.01,0;0,0.0001];
R=[0.1,0;0,0.1];
rng(1);
w=mvnrnd(mu,Q,N)';
v=mvnrnd(mu,R,N)';
for k=1:N-1
x1=x(1,k);x2=x(2,k);
w1=w(1,k);w2=w(2,k);
x(:,k+1)=[x1+T*x2+w1;-10*T*sin(x1)+(1-T)*x2+w2];
x1=x(1,k+1);x2=x(2,k+1);
v1=v(1,k+1);v2=v(2,k+1);
z(:,k+1)=[2*sin(x1/2)+v1;x1/2+v2];
end
%EKF估计
xk=zeros(2,N);
xk(:,1)=[1;0];
Pk=[1,0;0,1];
for k=1:N-1
x1=xk(1,k);x2=xk(2,k);
Fai=[1,T;-10*T*cos(x1),1-T];
xk(:,k+1)=[x1+T*x2;-10*T*sin(x1)+(1-T)*x2];
Pk=Fai*Pk*Fai'+Q;
x1=xk(1,k+1);x2=xk(2,k+1);
Hk=[cos(x1/2),0;1/2,0];
Kk=Pk*Hk'/(Hk*Pk*Hk'+R);
xk(:,k+1)=xk(:,k+1)+Kk*(z(:,k+1)-[2*sin(x1/2);x1/2]);
Pk=(eye(2)-Kk*Hk)*Pk*(eye(2)-Kk*Hk)'+Kk*R*Kk';
end
subplot(2,1,1);
plot(t,x(1,:),'-r',t,z(1,:),'-g',t,xk(1,:),'-b');
xlabel('t');
ylabel('x1');
subplot(2,1,2);
plot(t,x(2,:),'-r',t,z(2,:),'-g',t,xk(2,:),'-b');
xlabel('t');
ylabel('x2');
legend('状态值','测量值','EKF');
输出结果:

UKF算法模型


clc;
clear;
%测量值模拟
T=0.05;%滤波周期
T_go=10;%滤波时间
N=T_go/T;%观测次数
t=0:T:T_go-T;%假定输出序列(供画图用)
x=zeros(2,N);
z=zeros(2,N);
x(:,1)=[1;0];%真值初始值
mu=[0;0];
Q=[0.01,0;0,0.0001];
R=[0.1,0;0,0.1];
rng(1);
w=mvnrnd(mu,Q,N)';
v=mvnrnd(mu,R,N)';
for k=1:N-1
x1=x(1,k);x2=x(2,k);
w1=w(1,k);w2=w(2,k);
x(:,k+1)=[x1+T*x2+w1;-10*T*sin(x1)+(1-T)*x2+w2];
x1=x(1,k+1);x2=x(2,k+1);
v1=v(1,k+1);v2=v(2,k+1);
z(:,k+1)=[2*sin(x1/2)+v1;x1/2+v2];
end
%UKF估计
alpha=0.1;
beta=2;
kappa=1;
n=2;%状态维数
lamda=alpha^2*(n+kappa)-n;
xk=zeros(2,N);
%1.初始化
xk(:,1)=[1;0];
Pk=[1,0;0,1];
wm=zeros(1,5);
wc=zeros(1,5);
wm(1)=lamda/(n+lamda);
wc(1)=lamda/(n+lamda)+1-alpha^2+beta;
for i=2:2*n+1
wm(i)=1/(2*(n+lamda));
wc(i)=1/(2*(n+lamda));
end
for k=1:N-1
%2.计算k-1时刻采样点和权值
xsigma=zeros(2,5);
xsigma(:,1)=xk(:,k);
xsigma(:,2)=xk(:,k)+sqrt(n+lamda)*sqrt(Pk(:,1));
xsigma(:,3)=xk(:,k)+sqrt(n+lamda)*sqrt(Pk(:,2));
xsigma(:,4)=xk(:,k)-sqrt(n+lamda)*sqrt(Pk(:,1));
xsigma(:,5)=xk(:,k)-sqrt(n+lamda)*sqrt(Pk(:,2));
%3.计算k时刻的一步预测模型值
xsigmapre=zeros(2,5);
for i=1:5
xsigmapre(:,i)=[xsigma(1,i)+T*xsigma(2,i);-10*T*sin(xsigma(1,i))+(1-T)*xsigma(2,i)];
end
xkpre=xsigmapre*wm';
Pkpre=Q;
for i=1:5
Pkpre=Pkpre+wc(i)*(xsigmapre(:,i)-xkpre)*(xsigmapre(:,i)-xkpre)';
end
%4.计算k时刻的一步预测样本点(重新采样)
% xsigma(:,1)=xkpre;
% xsigma(:,2)=xkpre+sqrt(n+lamda)*sqrt(Pkpre(1));
% xsigma(:,3)=xkpre+sqrt(n+lamda)*sqrt(Pkpre(2));
% xsigma(:,4)=xkpre-sqrt(n+lamda)*sqrt(Pkpre(1));
% xsigma(:,5)=xkpre-sqrt(n+lamda)*sqrt(Pkpre(2));
%5.计算k时刻的预测量测值
zsigmapre=zeros(2,5);
for i=1:5
zsigmapre(:,i)=[2*sin(xsigma(1,i)/2);xsigma(1,i)/2] ;
end
zkpre=zsigmapre*wm';
Pzzk=R;
Pxzk=zeros(2);
for i=1:5
Pzzk=Pzzk+wc(i)*(zsigmapre(:,i)-zkpre)*(zsigmapre(:,i)-zkpre)';
Pxzk=Pxzk+wc(i)*(xsigma(:,i)-xkpre)*(zsigmapre(:,i)-zkpre)';
end
%6.量测更新
Kk=Pxzk/Pzzk;
xkpre=xkpre+Kk*(z(:,k+1)-zkpre);
Pkpre=Pkpre-Kk*Pzzk*Kk';
xk(:,k+1)=xkpre;
Pk=Pkpre;
end
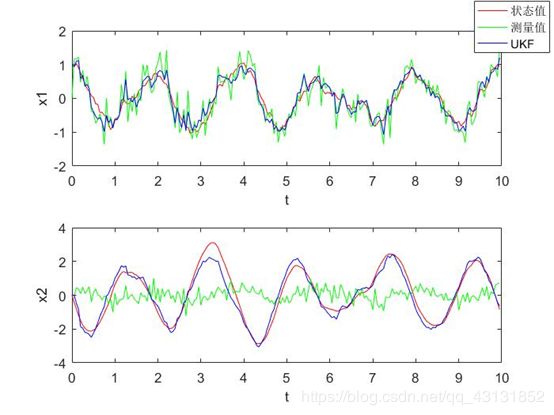
subplot(2,1,1);
plot(t,x(1,:),'-r',t,z(1,:),'-g',t,xk(1,:),'-b');
xlabel('t');
ylabel('x1');
subplot(2,1,2);
plot(t,x(2,:),'-r',t,z(2,:),'-g',t,xk(2,:),'-b');
xlabel('t');
ylabel('x2');
legend('状态值','测量值','UKF');
输出结果: