平面极坐标系下质点的运动方程
一、平面极坐标系定义
1. 定义
在参考系上取一点 O O O 称为极点,由 O O O 点引一有刻度的射线,称之为极轴,即构成极坐标系。
2. 极坐标系
质点的位置 P P P 由极径 ρ \rho ρ 和幅角 θ \theta θ 给出。如下图所示。
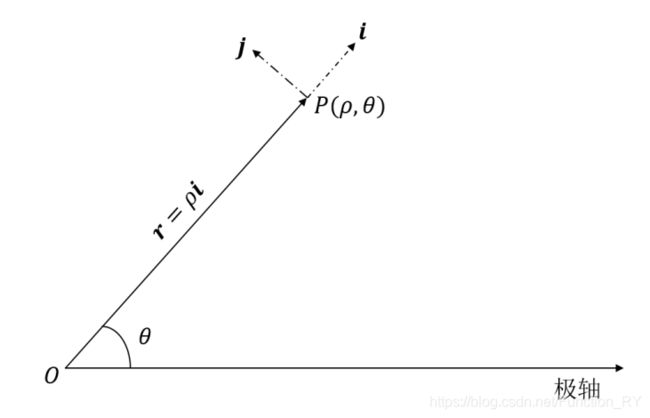
ρ \rho ρ :极径,极点到质点的距离
θ \theta θ:幅角或极角,极径与极轴的夹角,规定角度取逆时针方向为正
3. 正交单位矢量
- 径向单位矢量 i \bm{i} i :方向从极点指向质点。则矢径 r = ρ i \bm{r} = \rho \bm{i} r=ρi。
- 横向单位矢量 j \bm{j} j :方向与径向单位矢量垂直,且指向 θ \theta θ 增加的方向。
4. 正交单位矢量对时间 t 的导数的计算
设初始时刻质点位置为 P 1 P_{1} P1,经过时间 d t dt dt,质点位置为 P 2 P_{2} P2,幅角变化量为 d θ d\theta dθ。如下图所示。

4.1 径向单位矢量 i \bm{i} i
经过时间 d t dt dt,径向单位矢量由 i 1 \bm{i}_{1} i1变化到 i 2 \bm{i}_{2} i2,转过的角度为 d θ d\theta dθ。
d i = i 2 − i 1 d\bm{i}=\bm{i}_{2}-\bm{i}_{1} di=i2−i1
由于 i \bm{i} i为单位矢量,且 d t dt dt为趋于 0 0 0的微元。所以 d i d\bm{i} di的大小即为以 ∣ i ∣ |\bm{i}| ∣i∣为半径,角度为 d θ d\theta dθ所对应的弧长(单位矢量 i \bm{i} i从 i 1 \bm{i}_{1} i1旋转到 i 2 \bm{i}_{2} i2时,箭头末端所经过的路程),其大小为:
∣ d i ∣ = ∣ i ∣ ⋅ d θ = d θ |d\bm{i}|=|\bm{i}|\cdot d\theta=d\theta ∣di∣=∣i∣⋅dθ=dθ
d i d\bm{i} di的方向为从 i 1 \bm{i}_{1} i1的末端指向 i 2 \bm{i}_{2} i2的末端,当 d t dt dt趋于 0 0 0时, d i d\bm{i} di的方向垂直于 i \bm{i} i并且指向 θ \theta θ的增加方向,所以 d i d\bm{i} di与 j \bm{j} j同向。即:
d i = j d θ d\bm{i}=\bm{j}d\theta di=jdθ
对时间的导数为
d i d t = j d θ d t \frac{d\bm{i}}{dt}=\bm{j}\frac{d\theta}{dt} dtdi=jdtdθ
4.2 横向单位矢量 j \bm{j} j
同理,经过时间 d t dt dt,横向单位矢量由 j 1 \bm{j}_{1} j1变化到 j 2 \bm{j}_{2} j2,转过的角度为 d θ d\theta dθ。
d j = j 2 − j 1 d\bm{j}=\bm{j}_{2}-\bm{j}_{1} dj=j2−j1
其大小为
∣ d j ∣ = ∣ j ∣ ⋅ d θ = d θ |d\bm{j}|=|\bm{j}|\cdot d\theta=d\theta ∣dj∣=∣j∣⋅dθ=dθ
其方向与径向单位矢量 i \bm{i} i反向,所以横向单位矢量对时间的导数为
d j d t = − i d θ d t \frac{d\bm{j}}{dt}=-\bm{i}\frac{d\theta}{dt} dtdj=−idtdθ
二、极坐标系下运动方程
- 运动学方程: r = r ( t ) r=r(t) r=r(t), \hspace{0.3cm} θ = θ ( t ) \theta=\theta (t) θ=θ(t)
- 质点位置矢量: r = r ( t ) \bm{r}=\bm{r}(t) r=r(t)
- 质点轨迹方程: r = r ( θ ) r=r(\theta) r=r(θ)
三、极坐标系中的速度
在极坐标系中
r = ρ i \bm{r}=\rho \bm{i} r=ρi
速度
v = d r d t = d ( ρ i ) d t = d ρ d t i + ρ d i d t \bm{v}=\frac{d\bm{r}}{dt}=\frac{d(\rho \bm{i})}{dt}=\frac{d\rho}{dt}\bm{i}+\rho \frac{d\bm{i}}{dt} v=dtdr=dtd(ρi)=dtdρi+ρdtdi
又
d i d t = j d θ d t \frac{d\bm{i}}{dt}=\bm{j}\frac{d\theta}{dt} dtdi=jdtdθ
所以
v = d ρ d t i + ρ d θ d t j = v r i + v θ j \bm{v}=\frac{d\rho}{dt}\bm{i}+\rho \frac{d\theta}{dt}\bm{j}=v_{r}\bm{i}+v_{\theta}\bm{j} v=dtdρi+ρdtdθj=vri+vθj
- 径向速度 v r = d ρ d t v_{r}=\frac{d\rho}{dt} vr=dtdρ,由位矢的量值变化所引起的;
- 横向速度 v θ = ρ d θ d t v_{\theta}=\rho \frac{d\theta}{dt} vθ=ρdtdθ,由位矢方向的变化所引起的,其中 ω = d θ d t \omega=\frac{d\theta}{dt} ω=dtdθ为角速度。
总的速度大小
∣ v ∣ = v r 2 + v θ 2 = ( d ρ d t ) 2 + ( ρ d θ d t ) 2 |\bm{v}|=\sqrt{v_{r}^{2}+v_{\theta}^{2}}=\sqrt{(\frac{d\rho}{dt})^{2}+(\rho \frac{d\theta}{dt})^{2}} ∣v∣=vr2+vθ2=(dtdρ)2+(ρdtdθ)2
四、极坐标系中的加速度
由加速度定义
a = d v d t = d d t ( d ρ d t i + ρ d θ d t j ) \bm{a}=\frac{d\bm{v}}{dt}=\frac{d}{dt}(\frac{d\rho}{dt}\bm{i}+\rho \frac{d\theta}{dt}\bm{j}) a=dtdv=dtd(dtdρi+ρdtdθj)
其中
d d t ( d ρ d t i ) = d 2 ρ d t 2 i + d ρ d t d i d t = d 2 ρ d t 2 i + d ρ d t d θ d t j \frac{d}{dt}(\frac{d\rho}{dt}\bm{i})=\frac{d^2 \rho}{dt^2}\bm{i}+\frac{d\rho}{dt}\frac{d\bm{i}}{dt}=\frac{d^2 \rho}{dt^2}\bm{i}+\frac{d\rho}{dt}\frac{d\theta}{dt}\bm{j} dtd(dtdρi)=dt2d2ρi+dtdρdtdi=dt2d2ρi+dtdρdtdθj
d d t ( ρ d θ d t j ) = d ρ d t d θ d t j + ρ d 2 θ d t 2 j + ρ d θ d t d j d t = d ρ d t d θ d t j + ρ d 2 θ d t 2 j − ρ ( d θ d t ) 2 i \frac{d}{dt}(\rho \frac{d\theta}{dt}\bm{j})=\frac{d\rho}{dt}\frac{d\theta}{dt}\bm{j}+\rho \frac{d^2 \theta}{dt^2}\bm{j}+\rho \frac{d\theta}{dt}\frac{d\bm{j}}{dt}=\frac{d\rho}{dt}\frac{d\theta}{dt}\bm{j}+\rho \frac{d^2 \theta}{dt^2}\bm{j}-\rho (\frac{d\theta}{dt})^2 \bm{i} dtd(ρdtdθj)=dtdρdtdθj+ρdt2d2θj+ρdtdθdtdj=dtdρdtdθj+ρdt2d2θj−ρ(dtdθ)2i
由此可得
a = [ d 2 ρ d t 2 − ρ ( d θ d t ) 2 ] i + [ ρ d 2 θ d t 2 + 2 d ρ d t d θ d t ] j = a r i + a θ j \bm{a}=[\frac{d^2 \rho}{dt^2}-\rho (\frac{d\theta}{dt})^2]\bm{i}+[\rho \frac{d^2 \theta}{dt^2}+2\frac{d\rho}{dt}\frac{d\theta}{dt}]\bm{j}=a_{r}\bm{i}+a_{\theta}\bm{j} a=[dt2d2ρ−ρ(dtdθ)2]i+[ρdt2d2θ+2dtdρdtdθ]j=ari+aθj
欢迎关注微信公众号“理工学派”(ID:sciengpi),获取更多自然科学方面的文章。
