《PCL点云库学习&VS2010(X64)》Part 34 旋转平移矩阵用法
《PCL点云库学习&VS2010(X64)》Part 34 旋转平移矩阵用法
1、变换与投影矩阵讲解:
https://en.wikipedia.org/wiki/Transformation_matrix
http://web.iitd.ac.in/~hegde/cad/lecture/L6_3dtrans.pdf
点云变换主要涉及平移、旋转、缩放、反射、剪切、视角转换、投影等,这里主要介绍平移与旋转。
2、使用Eigen::Matrix4f 进行变换
#include
#include
#include
int
main(int argc, char** argv)
{
// Objects for storing the point clouds.
pcl::PointCloud::Ptr cloud(new pcl::PointCloud);
pcl::PointCloud::Ptr transformed(new pcl::PointCloud);
// Read a PCD file from disk.
if (pcl::io::loadPCDFile(argv[1], *cloud) != 0)
{
return -1;
}
// Transformation matrix object, initialized to the identity matrix
// (a null transformation).
Eigen::Matrix4f transformation = Eigen::Matrix4f::Identity();
// Set a rotation around the Z axis (right hand rule).
float theta = 90.0f * (M_PI / 180.0f); // 90 degrees.
transformation(0, 0) = cos(theta);
transformation(0, 1) = -sin(theta);
transformation(1, 0) = sin(theta);
transformation(1, 1) = cos(theta);
// Set a translation on the X axis.
transformation(0, 3) = 1.0f; // 1 meter (positive direction).
pcl::transformPointCloud(*cloud, *transformed, transformation);
// Visualize both the original and the result.
pcl::visualization::PCLVisualizer viewer(argv[1]);
viewer.addPointCloud(cloud, "original");
// The transformed one's points will be red in color.
pcl::visualization::PointCloudColorHandlerCustom colorHandler(transformed, 255, 0, 0);
viewer.addPointCloud(transformed, colorHandler, "transformed");
// Add 3D colored axes to help see the transformation.
viewer.addCoordinateSystem(1.0, 0);
while (!viewer.wasStopped())
{
viewer.spinOnce();
}
} 2、使用Eigen::Affine3进行变换
#include
#include
#include
#include
#include
#include
#include
// This function displays the help
void
showHelp(char * program_name)
{
std::cout << std::endl;
std::cout << "Usage: " << program_name << " cloud_filename.[pcd|ply]" << std::endl;
std::cout << "-h: Show this help." << std::endl;
}
// This is the main function
int
main (int argc, char** argv)
{
// Show help
if (pcl::console::find_switch (argc, argv, "-h") || pcl::console::find_switch (argc, argv, "--help")) {
showHelp (argv[0]);
return 0;
}
// Fetch point cloud filename in arguments | Works with PCD and PLY files
std::vector filenames;
bool file_is_pcd = false;
filenames = pcl::console::parse_file_extension_argument (argc, argv, ".ply");
if (filenames.size () != 1) {
filenames = pcl::console::parse_file_extension_argument (argc, argv, ".pcd");
if (filenames.size () != 1) {
showHelp (argv[0]);
return -1;
} else {
file_is_pcd = true;
}
}
// Load file | Works with PCD and PLY files
pcl::PointCloud::Ptr source_cloud (new pcl::PointCloud ());
if (file_is_pcd) {
if (pcl::io::loadPCDFile (argv[filenames[0]], *source_cloud) < 0) {
std::cout << "Error loading point cloud " << argv[filenames[0]] << std::endl << std::endl;
showHelp (argv[0]);
return -1;
}
} else {
if (pcl::io::loadPLYFile (argv[filenames[0]], *source_cloud) < 0) {
std::cout << "Error loading point cloud " << argv[filenames[0]] << std::endl << std::endl;
showHelp (argv[0]);
return -1;
}
}
/* Reminder: how transformation matrices work :
|-------> This column is the translation
| 1 0 0 x | \
| 0 1 0 y | }-> The identity 3x3 matrix (no rotation) on the left
| 0 0 1 z | /
| 0 0 0 1 | -> We do not use this line (and it has to stay 0,0,0,1)
METHOD #1: Using a Matrix4f
This is the "manual" method, perfect to understand but error prone !
*/
Eigen::Matrix4f transform_1 = Eigen::Matrix4f::Identity();
// Define a rotation matrix (see https://en.wikipedia.org/wiki/Rotation_matrix)
float theta = M_PI/4; // The angle of rotation in radians
transform_1 (0,0) = cos (theta);
transform_1 (0,1) = -sin(theta);
transform_1 (1,0) = sin (theta);
transform_1 (1,1) = cos (theta);
// (row, column)
// Define a translation of 2.5 meters on the x axis.
transform_1 (0,3) = 2.5;
// Print the transformation
printf ("Method #1: using a Matrix4f\n");
std::cout << transform_1 << std::endl;
/* METHOD #2: Using a Affine3f
This method is easier and less error prone
*/
Eigen::Affine3f transform_2 = Eigen::Affine3f::Identity();
// Define a translation of 2.5 meters on the x axis.
transform_2.translation() << 2.5, 0.0, 0.0;
// The same rotation matrix as before; theta radians arround Z axis
transform_2.rotate (Eigen::AngleAxisf (theta, Eigen::Vector3f::UnitZ()));
// Print the transformation
printf ("\nMethod #2: using an Affine3f\n");
std::cout << transform_2.matrix() << std::endl;
// Executing the transformation
pcl::PointCloud::Ptr transformed_cloud (new pcl::PointCloud ());
// You can either apply transform_1 or transform_2; they are the same
pcl::transformPointCloud (*source_cloud, *transformed_cloud, transform_2);
// Visualization
printf( "\nPoint cloud colors : white = original point cloud\n"
" red = transformed point cloud\n");
pcl::visualization::PCLVisualizer viewer ("Matrix transformation example");
// Define R,G,B colors for the point cloud
pcl::visualization::PointCloudColorHandlerCustom source_cloud_color_handler (source_cloud, 255, 255, 255);
// We add the point cloud to the viewer and pass the color handler
viewer.addPointCloud (source_cloud, source_cloud_color_handler, "original_cloud");
pcl::visualization::PointCloudColorHandlerCustom transformed_cloud_color_handler (transformed_cloud, 230, 20, 20); // Red
viewer.addPointCloud (transformed_cloud, transformed_cloud_color_handler, "transformed_cloud");
viewer.addCoordinateSystem (1.0, "cloud", 0);
viewer.setBackgroundColor(0.05, 0.05, 0.05, 0); // Setting background to a dark grey
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 2, "original_cloud");
viewer.setPointCloudRenderingProperties (pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 2, "transformed_cloud");
//viewer.setPosition(800, 400); // Setting visualiser window position
while (!viewer.wasStopped ()) { // Display the visualiser until 'q' key is pressed
viewer.spinOnce ();
}
return 0;
} 3、使用Eigen::Quaternion
4、总结:
1)使最小二乘方程值最小,从而求得c,R,T三个参数,分别表示局部放大系数、旋转系数和平移系数。
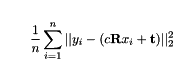
齐次变换后得到一个4x4矩阵:

返回一个矩阵,使上述的最小二乘方程最小。
见文章“Least-squares estimation of transformation parameters between two point patterns”Shinji Umeyama, PAMI 1991, DOI: 10.1109/34.88573
2)matrix4f的具体结构及意义。
/* Reminder: how transformation matrices work :
|-------> This column is the translation
| 1 0 0 x | \
| 0 1 0 y | }-> The identity 3x3 matrix (no rotation) on the left
| 0 0 1 z | /
| 0 0 0 1 | -> We do not use this line (and it has to stay 0,0,0,1)
METHOD #1: Using a Matrix4f
This is the "manual" method, perfect to understand but error prone !
*/实际上该4x4矩阵肯定不止这些,具体的如下图所示:

其中p,q,r对应的透视变换参数,左上角三行三列包括局部缩放、剪切、旋转和反射等参数。具体的设置见文章中的第二个pdf链接。最后一行的l,m,n表示沿着x,y,z轴进行平移。s表示全局缩放参数。