UR机器人之二:直线插补详解
1.引言
看过UR机器人脚本手册的都应该知道有这样一个直线插补函数:
interpolate_pose(p_from, p_to, alpha);
参数:p_from表示初始pose,p_to表示目标pose,alpha通常为0-1之间的浮点数,如果alpha=0,则函数插值返回的pose是p_from;如果alpha=1,则函数插值返回的pose是p_to;如果alpha<0,则函数插值返回的pose是这条直线在p_from之前的部分;如果alpha>1,则函数插值返回的pose是这条直线在p_to之后的部分;
返回值:返回一个插值之后的pose;
这个函数在实际应用的过程中表现非常好,很少出现奇异点和不可达的点的问题。那么这个函数具体是如何实现的呢?
也许有人要说了,直线插补太简单了,不屑一顾。但是我看过许多国内机器人教材,很少能把机器人轨迹是如何生成的这一过程讲清楚,或者连一个简单的点到点直线插补全过程都写得含糊不清。
以前我也觉得这样简单的算法没什么好研究的,随便找本书或论文看看就知道了,但当我真正要在机器人上实现这一算法时,遇到了各种各样的问题,于是我就怀疑是否真的了解了机器人生成轨迹的方法,直到我看完这本书为止。
2.《Modern Robotics》
这本书的全称是《Modern Robotics - Mechanics, Planning, and Control》2016年出的机器人学方面的书。
这本书的第九章《Trajectory Generation》是我看过的十几本机器人学书籍里面写的最透彻的。
机器人轨迹的定义:机器人位置随时间变化的描述称为轨迹;
首先要明白两个概念:path和time scaling。
path表示一组路径的集合,也可以理解为一组机器人位置的集合;
time scaling表示一组时间序列,即什么时间机器人要到什么位置。
本章考虑了三种轨迹规划问题:点到点的直线轨迹;通过一系列时间和点的集合的问题;最短时间轨迹问题。
而本文只考虑点到点的直线轨迹问题。这个问题分为关节空间和工作空间两种,这两种在下文中都有详解。
3.Point-to-Point Trajectories
首先要区分路径(path)和时间尺度(time scaling)这两个概念。
路径用θ(s)表示,其中s就是时间尺度,有时s就是表示时间t,但将s与时间参数t分离是一种更有效的方式,本书就是这么做的。
时间尺度s(t)∈[0, 1],t∈[0, T],如果s=0,表示the start of the path,如果s=1时表示the end of the path。
将路径(path)和时间尺度(time scaling)合起来就是轨迹(trajectory)表示成θ(s(t))。轨迹的速度和加速度就可以表示为:
所以要想轨迹有较好的动态性能(即平滑的速度和加速度曲线),那么要保证θ(s)和s(t)都可以二次微分。
根据上面的分析,将轨迹分为θ(s)和s(t),这样一来,路径就与时间进行了分离,分离的好处在于:如果想让轨迹是一条直线或圆弧,那么我们只需要考虑θ(s)函数的设计,而不用考虑时间问题;同理,如果我们想要得到梯形速度曲线或S形加速度曲线,那么也只用考虑s(t)函数,而不需要知道路径到底是直线还是圆弧;
所以,接下来的直线轨迹算法就分别以路径(path)和时间尺度(time scaling)进行。
4.Straight-Line Paths
如果是关节空间的直线插补,那么path就是:
![]()
微分:
关节空间的直线插补,通常在工作空间不是直线运动。
如果是工作空间的直线插补,那么将上式的θ改成X表示工作空间的位置和姿态。
如果X是使用最小坐标集来表示工作空间的位置和姿态,这里的最小坐标集的意思是用最少的参数来表示位姿,如UR中使用的p[x, y, z, ax, ay, az],那么工作空间的直线插补与上式一样:
![]()
在上式的直线插补中,需要注意两个问题:
- 如果路径会经过奇异点附近,那么几乎整个时间尺度上的所有路径的关节角速度都会变得非常大;
- 因为机器人的工作空间可能不是凸的,所以有可能会出现Xstart和Xend都在工作空间内,但是中间点却不在工作空间内的情况;
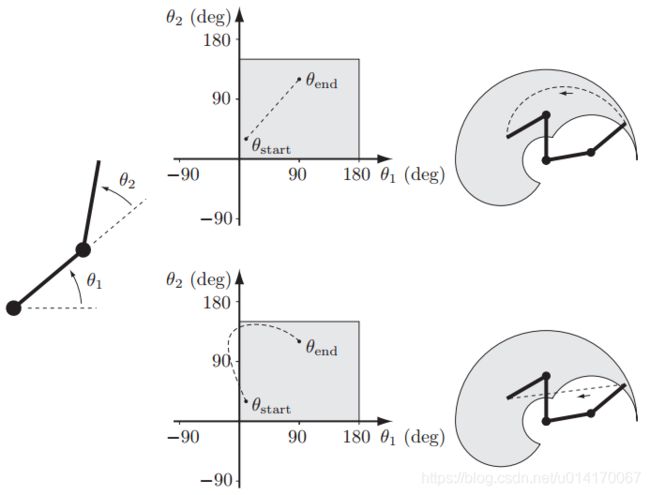
上图表示的是,在关节空间每个关节都进行直线插补,在工作空间的轨迹不是直线的情况;
下图表示的是,直线插补的起点和终点都在工作空间内,而插补出来的直线中间点不在工作空间内的情况;
上面的分析,是当X使用最小坐标集来表示工作空间的位置和姿态的情况。
如果X∈SE(3)的方式来表示机器人在工作空间的位姿,那么直线插补也要满足SE(3)的表示方法。这里的SE(3)的定义如下:
**定义1:**特殊欧几里得群(Special Euclidean Group)SE(3),或者可以称为齐次变换矩阵,表示成:
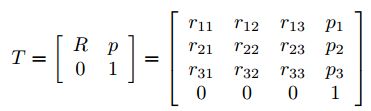
这里R∈SO(3),p是列向量。(SO(3)见定义2)
通过螺旋运动的理论得到直线插补公式(具体怎么得到的这个公式请看《Modern Robotics - Mechanics, Planning, and Control》这本书):
![]()
利用这个公式插补出来的直线,并不是一条直线,而是一条螺旋运动的轨迹。
通过将位置和姿态分离可以得到另外一个直线插补公式:
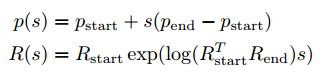
在这个公式里,R表示旋转变换矩阵,表示机器人在工作空间的姿态,p表示位置。通过这样位置和姿态分离之后,可以看出位置保持一条直线轨迹,而姿态以螺旋运动的方式变化。
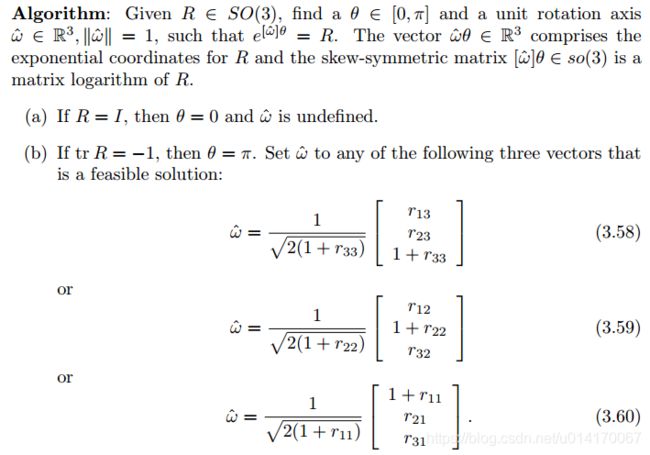
以上两种公式,插补得到的直线轨迹区别如下图:
如图所示,上面一条轨迹没有分离位置和姿态(平移和旋转),实际得到的轨迹不是一条直线,而是一种螺旋运动曲线。而分离之后的轨迹在位置上是一条直线,姿态上以螺旋方式运动。
看了上面的公式,可能有人会觉得奇怪,怎么对矩阵进行对数、指数运算?
讨论这个问题之前,先插入两个定义:
**定义2:**特殊正交群(Special Orthogonal Group)SO(3),也就是通常说的旋转变换矩阵,是一个33的实数矩阵R,满足:
![]()
定义3:对于给定的向量:
![]()
定义:

这里[x]是相对于x的33斜对称矩阵,对于所有这样的斜对称矩阵集合成为so(3)。
关于指数、对数的运算,这里只给出一个结论,至于为什么是这样的,就需要自己去看书了。
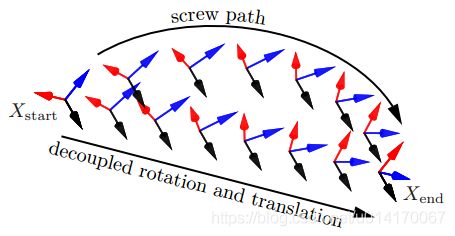
1.首先看矩阵的对数运算,如果R∈SO(3),那么对R求对数得到:
![]()
其中
![]()
也就是说对R求对数就是将R转换成ω和θ的表示方式,如何得到ω和θ?方法如下:

2.再来看矩阵的指数运算:
![]()
指数运算和对数运算是相反的过程,这里就表示将ω和θ转换成R,转换方法如下:

这里cθ和sθ分别表示cosθ和sinθ。
到这里,Straight-Line Paths的部分就结束了,接下来是Time Scaling。
5.Time Scaling a Straight-Line Path
这里只写三次多项式和梯形速度曲线两种,其他的都大同小异。
由上述轨迹的速度和加速度公式如下:

对于直线而言dθ/ds是常数,d²θ/ds²=0,所以直线轨迹的速度和加速度主要取决于ds/st和d²s/dt²。
1.三次多项式
对于时间尺度函数s(t),三次多项式的形式为:
![]()
满足下列两个约束条件:
![]()
![]()
那么函数s(t)及其速度、加速度曲线如下:
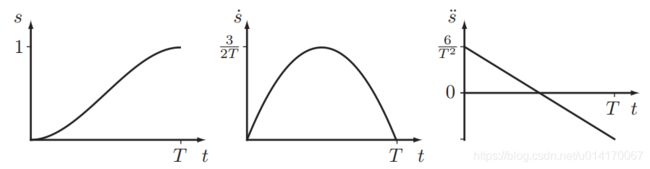
注意这里的s(t)∈[0,1],将其代入上面的Path函数中,就能得到速度为二次曲线的直线插补轨迹;
2.梯形速度曲线
符合梯形速度曲线的公式如下:
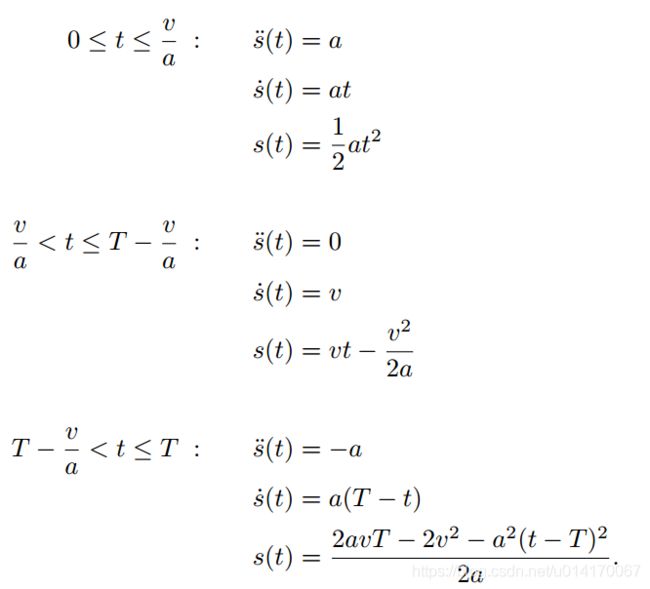
s(t)函数及其速度曲线如下图所示:

将s(t)代入到Path函数中,就可以得到速度满足梯形曲线要求的直线插补轨迹;
上面写了这么多,其实算法很简单,只是想说明一个思想,就是:轨迹(Trajectories)=路径(Path)+时间(Time Scaling),将时间和路径分离开是这个思想的核心。明白了这个思想,看到其他更复杂的轨迹问题时,就会觉得简单明了。包括在代码实现的过程中,用这个思想封装API不论是自己还是让其他人调用起来也更加方便。