【OpenCV3图像处理】提取轮廓的凸包、外包矩形、最小外包矩形、最小外包圆
1、提取轮廓的凸包
convexhull()函数(点我看OpenCV3.2帮助文档)
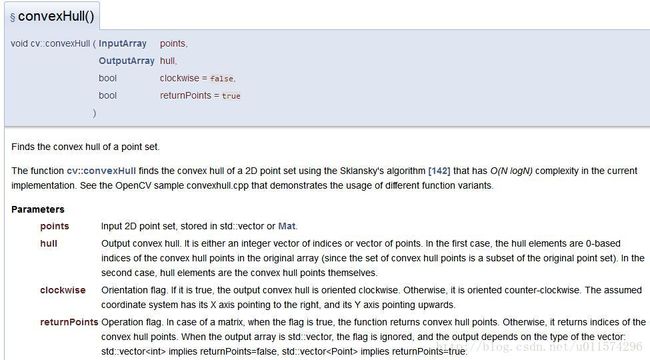
函数调用形式:
void convexhul(InputArray points,OutputArray hull,bool clockwise=false,bool returnPoints=true)
输入:
第一个参数是要求凸包的点集
第二个参数是输出的凸包点,可以为vector,此时返回的是凸包点在原轮廓点集中的索引,也可以为vector,此时存放的是凸包点的位置
第三个参数是一个bool变量,表示求得的凸包是顺时针方向还是逆时针方向,true是顺时针方向。
第四个参数,第二个参数的返回类型是vector还是vector,可以忽略
示例:
#define _CRT_SECURE_NO_WARNINGS
#include
#include
#include
using namespace cv;
using namespace std;
int main()
{
Mat srcImage(Size(500, 500), CV_8UC3, Scalar(0));
// 随机类RNG,默认的构造函数初始化为固定的值,随机“种子”也是固定的,还有一个带参数的构造函数,你可以指定“种子”,
// 用系统时间来指定,以确保每次执行都是“不同的种子” 从而得到不同的随机序列
RNG rng((unsigned)time(NULL));
char key;
while (1)
{
//随机生成一些点
//首先就是随机生成点的总数量
int g_nPointCount = rng.uniform(10, 30);
//接下来就是随机生成一些点的坐标
vector效果:

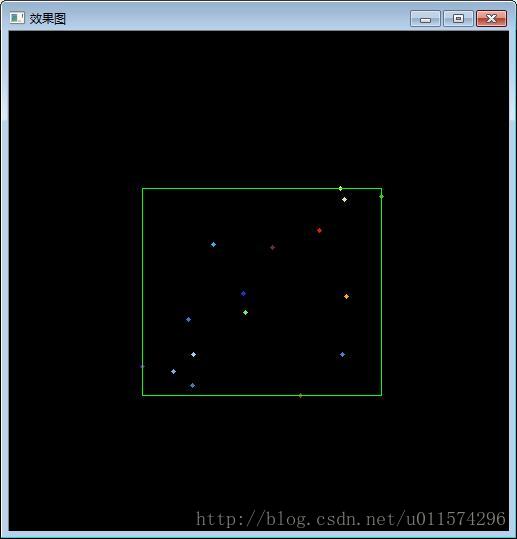
2、提取轮廓的外包矩形
boundingRect()函数(点我看OpenCV3.2帮助文档)
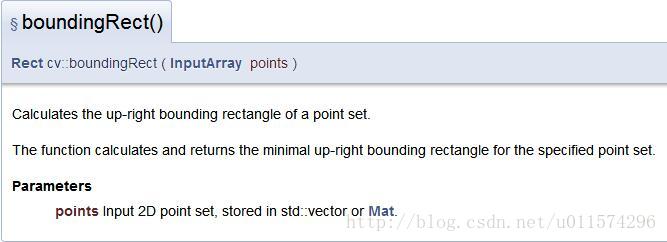
函数作用:
计算轮廓的外包矩形,矩形是与图像上下边界平行的
函数调用形式:
Rect boundingRect(InputArray points)
输入:二维点集,点的序列或向量 (Mat)
返回:Rect
示例:
#define _CRT_SECURE_NO_WARNINGS
#include
#include
#include
using namespace cv;
using namespace std;
int main()
{
Mat srcImage(Size(500, 500), CV_8UC3, Scalar(0));
// 随机类RNG,默认的构造函数初始化为固定的值,随机“种子”也是固定的,还有一个带参数的构造函数,你可以指定“种子”,
// 用系统时间来指定,以确保每次执行都是“不同的种子” 从而得到不同的随机序列
RNG rng((unsigned)time(NULL));
char key;
while (1)
{
//随机生成一些点
//首先就是随机生成点的总数量
int g_nPointCount = rng.uniform(10, 30);
//接下来就是随机生成一些点的坐标
vector效果图:
3、提取轮廓的最小外包矩形
minAreaRect()函数(点我看OpenCV3帮助文档)

函数作用:
主要求得包含点集最小面积的矩形,这个矩形是可以有偏转角度的,可以与图像的边界不平行
函数调用形式:
RotatedRect minAreaRect(InputArray points)
输入:二维点集,点的序列或向量 (Mat)
返回:RotatedRect
示例:
#define _CRT_SECURE_NO_WARNINGS
#include
#include
#include
using namespace cv;
using namespace std;
int main()
{
Mat srcImage(Size(500, 500), CV_8UC3, Scalar(0));
// 随机类RNG,默认的构造函数初始化为固定的值,随机“种子”也是固定的,还有一个带参数的构造函数,你可以指定“种子”,
// 用系统时间来指定,以确保每次执行都是“不同的种子” 从而得到不同的随机序列
RNG rng((unsigned)time(NULL));
char key;
while (1)
{
//随机生成一些点
//首先就是随机生成点的总数量
int g_nPointCount = rng.uniform(10, 30);
//接下来就是随机生成一些点的坐标
vector效果图:

RotatedRect类的详解,参见我另一篇博客:【opencv3学习笔记】RotatedRect类 详解
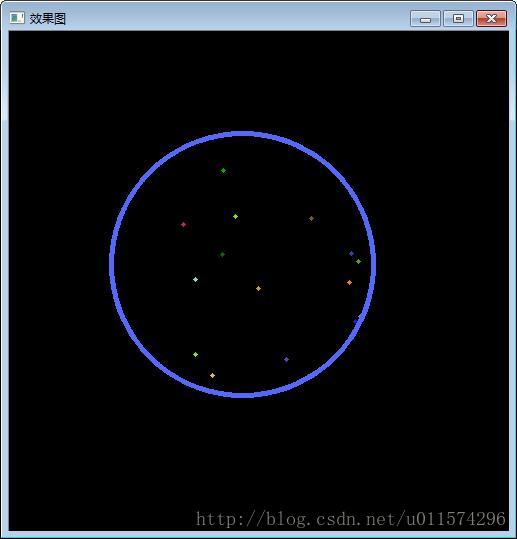
4、提取轮廓的最小外包圆
minEnclosingcircle()(点我看OpenCV3帮助文档)
函数调用形式:
void minEnclosingcircle(InputArray points,Point2f& center,float& radius)
输入:二维点集,点的序列vector< point >或向量 (Mat) ,圆心坐标,半径
示例:
#define _CRT_SECURE_NO_WARNINGS
#include
#include
#include
using namespace cv;
using namespace std;
int main()
{
Mat srcImage(Size(500, 500), CV_8UC3, Scalar(0));
// 随机类RNG,默认的构造函数初始化为固定的值,随机“种子”也是固定的,还有一个带参数的构造函数,你可以指定“种子”,
// 用系统时间来指定,以确保每次执行都是“不同的种子” 从而得到不同的随机序列
RNG rng((unsigned)time(NULL));
char key;
while (1)
{
//随机生成一些点
//首先就是随机生成点的总数量
int g_nPointCount = rng.uniform(10, 30);
//接下来就是随机生成一些点的坐标
vector(center), (int)radius, Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)), 3);
imshow("效果图", srcImage);
key = waitKey();
if (key == 27)
break;
else
srcImage = Scalar::all(0);
}
return 0;
} 效果图: