AABB包围盒与光线相交的检测算法
1. 表示方法
给出三种表示AABB的方法:
(1) Max-min表示法:使用一个右上角和左下角的点来唯一的定义一个包围体;
(2)Center-radious表示法:我们用center点来表示中点,radious是一个数组,保存了包围盒在x方向,y方向,z方向上的半径。
(3)Min-Width表示方法:我们用min来定义左下角的点,使用width来保存在x,y,z方向上的长度。
不同的方法,他们的碰撞检测算法也会有所不同,并且不同的表示方法也会适用在不同的情形下。
2. Ray-AABB交叉检测算法(Slabs method)
- 算法理解
下面是射线与平面不相交的情况:
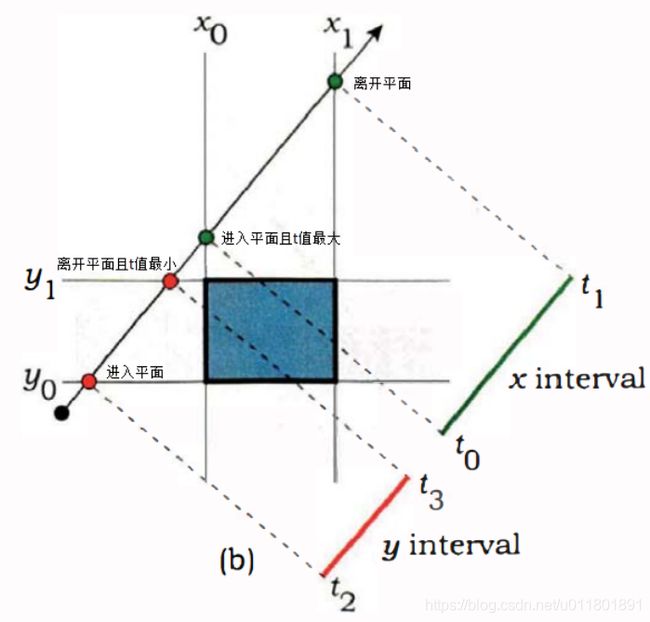
下面是射线与平面相交的情况:
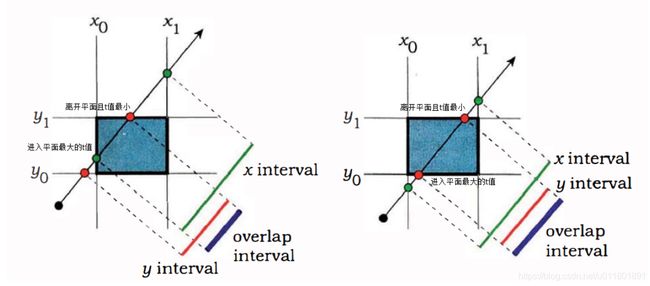
观察上述三幅图可以得出,只要发生区间交叠,光线与平面就能相交,区间交叠出现的条件是:光线进入平面处的最大t值(例如左图靠左的绿点)小于光线离开平面处的最小t值(例如左图靠右的红点)
问题转化:
问题就变成了如何求光线进入平面处的最大t值,和光线离开平面处的最小t值
这个问题通过光线与平面相交的参数方程求解就可以了,
光线的参数方程为R(t) = O + t * Dir,变换形式后得到:
t = (R(t) - O.x) / Dir.x
如果光线R(t)与平面相交,则交点R(tins)也应满足平面方程。
一般平面方程为aX+bY+cZ+d=0,因为AABB的六个面分别平行于XY、XZ、YZ平面,所以平面的方程为X=d,Y=d,Z=d。这样的话,就可以用d来代换平面上的交点R(tins),得到下列表达式:
光线与垂直于x轴的两个面相交时,t = (d - O.x) / Dir.x
光线与垂直于y轴的两个面相交时,t = (d - O.y) / Dir.y
光线与垂直于z轴的两个面相交时,t = (d - O.z) / Dir.z
求得t之后,根据上文的交叠条件,就能判断出射线与平面是否相交。注意到t<0时,交点位于光线的起点之后,则光线(射线)并未与盒体发生相交。
- 举例:用Max-min表示法的AABB与射线求交举例
用Max-min表示法来代表AABB时,这个d可以设为左下角点对应的三个面(d=AaBbMin.x,d= AaBbMin.y,d= AaBbMin.z),和右上角点对应的三个面(d=AaBbMax.x,d= AaBbMax.y,d= AaBbMax.z)
(1)求t:
找到两组平面对应的两组t,可对照下面代码查看。BottomT对应左下角点的三个面的t,TopT对应右上角点三个面的t。
(2)找到最小最大t
找到所有t中最小的MinT(分别找到x,y,z方向上各自最小的t)和最大的MaxT。
目的:这里主要是要找到近面上所有可能的t(MinT),和远面上所有可能的t(MaxT)
(3)找到最可能使条件满足的一对近面t和远面t
找到近面t(MinT)中的最大(LargestMinT)和远面t(MaxT)中的最小(LargestMaxT)
(4)判断是否相交
用刚才找出的可能性最大的一队来比较,比较标准是:
远面t>近面t,则交点存在。
再来回看下最初的交叠条件:
光线进入平面处的最大t值,小于光线离开平面处的最小t值。
光线进入的平面就是第(4)步里的近面,最大t值,就是LargestMinT,所以判断条件就是LargestMaxT > LargestMinT,则产生交点。
下面给出代码,该代码片段摘自ExposureRender
DEV bool IntersectBox(const CRay& R, float* pNearT, float* pFarT)
{
const Vec3f InvR = Vec3f(1.0f, 1.0f, 1.0f) / R.m_D;
const Vec3f BottomT = InvR * (Vec3f(gAaBbMin.x, gAaBbMin.y, gAaBbMin.z) - R.m_O);
const Vec3f TopT = InvR * (Vec3f(gAaBbMax.x, gAaBbMax.y, gAaBbMax.z) - R.m_O);
const Vec3f MinT = MinVec3f(TopT, BottomT);
const Vec3f MaxT = MaxVec3f(TopT, BottomT);
const float LargestMinT = fmaxf(fmaxf(MinT.x, MinT.y), fmaxf(MinT.x, MinT.z));
const float LargestMaxT = fminf(fminf(MaxT.x, MaxT.y), fminf(MaxT.x, MaxT.z));
*pNearT = LargestMinT;
*pFarT = LargestMaxT;
return LargestMaxT > LargestMinT;
}其中用到的几个函数为:
inline HOD Vec3f MinVec3f(Vec3f a, Vec3f b)
{
return Vec3f(min(a.x, b.x), min(a.y, b.y), min(a.z, b.z));
}
inline HOD Vec3f MaxVec3f(Vec3f a, Vec3f b)
{
return Vec3f(max(a.x, b.x), max(a.y, b.y), max(a.z, b.z));
}
inline float fminf(float a, float b)
{
return a < b ? a : b;
}
inline float fmaxf(float a, float b)
{
return a > b ? a : b;
}参考:
https://blog.csdn.net/linuxheik/article/details/53395394