寻路算法——A*算法详解并附带实现代码
一、前言
前天看了一篇博客介绍A*算法,按照自己的理解记录一下A*算法。
二、应用场景
一副地图中有坐标A和B,需要找到一条路径(如果有的话)能从A到B,地图中可能有河流或墙壁不能直接穿过,我们需要怎样找到这条路径呢?
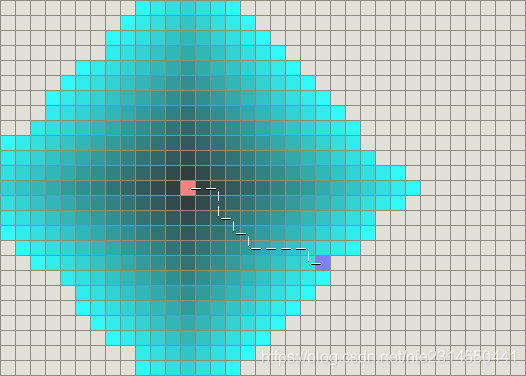
在我们以往学习到的路径寻找中,我们可以想到广度优先搜索(BFS:Breadth First Search)和深度优先搜索(DFS:Depth-First-Search) 进行路径寻找。先看一下广度优先搜索如下图(图片来源网上)。BFS以起点A为圆心,先搜索A周围的所有点,形成一个类似圆的搜索区域,再扩大搜索半径,进一步搜索其它没搜索到的区域,直到终点B进入搜索区域内被找到。
再看一下深度优先搜索,这里的深度优先搜索不是所有路径都搜索而是沿着B点方向搜索。(图片来源网上)。DFS则是让搜索的区域离A尽量远,离B尽量近,比如现在你在一个陌生的大学校园里,你知道校门口在你的北方,虽然你不知道你和校门口之间的路况如何,地形如何,但是你会尽可能的往北方走,总能找到校门口。
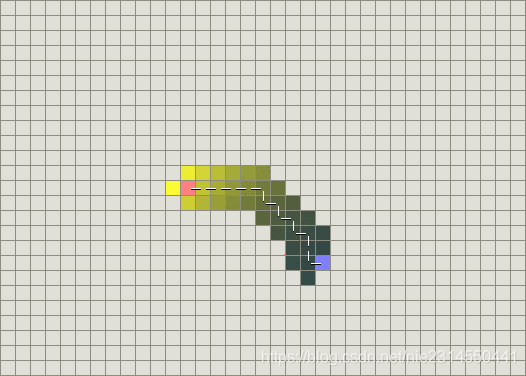
比起BFS,DFS因为尽量靠近终点的原则,其实是用终点相对与当前点的方向为导向,所以有一个大致的方向,就不用盲目地去找了,这样,就能比BFS能快地找出来最短路径,但是这种快速寻找默认起点A终点B之间没有任何障碍物,地形的权值也都差不多。如果起点终点之间有障碍物,那么DFS就会出现绕弯的情况。
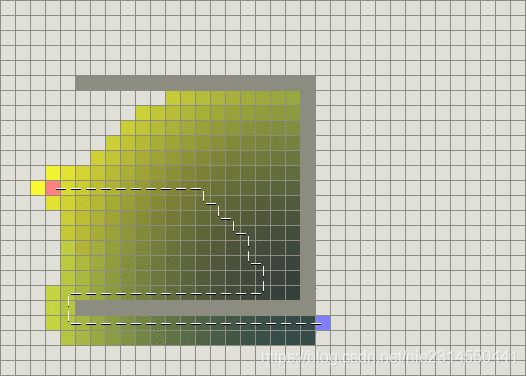
图中DFS算法使电脑一路往更右下方的区域探索,可以看出,在DFS遇到障碍物时,其实没有办法找到一条最优的路径,只能保证DFS会提供其中的一条路径(如果有的话)。
大概了解了BFS和DFS,对比这两者可以看出来,BFS保证的是从起点到达路线上的任意点花费的代价最小(但是不考虑这个过程是否要搜索很多格子);DFS保证的是通过不断矫正行走方向和终点的方向的关系,使发现终点要搜索的格子更少(但是不考虑这个过程是否绕远)。
A*算法的设计同时融合了BFS和DFS的优势,既考虑到了从起点通过当前路线的代价(保证了不会绕路),又不断的计算当前路线方向是否更趋近终点的方向(保证了不会搜索很多图块),是一种静态路网中最有效的直接搜索算法。
闲谈:我们知道BFS和DFS,但将这两种思想融会贯通,创造一种新的解决问题方法(A*算法),这在思路太棒了。膜拜学习。
三、A*算法
3.1 思想
A*算法运用的是估价思想。查找过程:
- 在待遍历列表中(刚开始只有点A),我们在列表中查找一个估价(当前点到终点距离估价,后续会讲)最小的点(k),
- 对点k进行一次广度优先查找,也就是它移动一次到底的下一个坐标(右,右上,上,左上,左,左下,下,右下)不包含已经遍历过的点和不能到达的点,将能查找的点添加到队列中,并将点K从队列中移除。
- 重复1、2步骤直到到底B点,或者队列已经为空说明没有路径可以到达点B。
运用的思想:先进行一次DFS搜索再进行一次BFS搜索,循环这个过程直到找到目标点B。
过程1:运用DFS思想,尽量找离B近的点(也就是估值最小的点)。
过程2:运用BFS思想,以点K为圆心,搜索A周围的所有还未搜索的点。
3.2 怎样估价
3.2.1 公式:F = G + H。
G = 从起点 A 移动到指定方格的移动代价,沿着到达该方格而生成的路径。我们约定直行移动一次代价是10,对角线的移动代价为 14。(实际对角移动距离是 2 的平方根,或者是近似的 1.414 倍的横向或纵向移动代价)。
H = 从指定的方格移动到终点 B 的估算成本。计算从当前方格横向或纵向移动到达目标所经过的方格数,忽略对角移动,然后把总数乘以 10 。
3.2.2 计算
我们设当前点为K
H 值很容易计算,H = (两个点横坐标距离 + 两个点纵坐标距离) X 10
G 值计算,计算K到A的最小估价我们只需要计算K点的周围八个点(可以被访问且已经被访问点)的g值+到K点的移动代价,其中最小估价即为K点的g值,这个点我们称为K点的父节点。k点正在访问,那么它周围至少有一个点已经被访问了。
3.2.2 约定
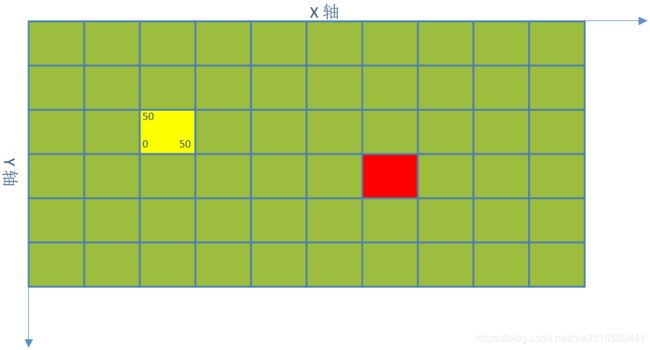
在一个方格中我们将FGH标记在它的左上,左下和右下三个位置,以便我们观察每次估价的结果。

箭头指向的是它父节点的坐标,后续找路线需要用到。

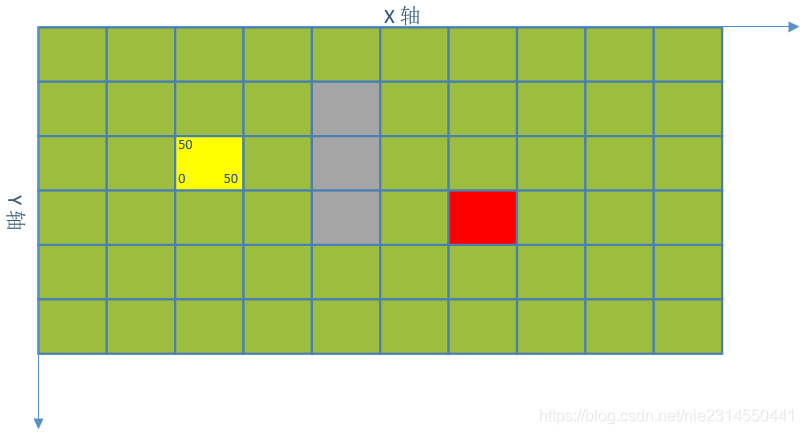
3.3 实例演示一 无障碍物 (对应编码实现中测试用例9)
说明:坐标访问和父节点查找约定顺序:右,右上,上,左上,左,左下,下,右下,沿X轴增加的方向为右,沿Y轴增加的方向为上,父节点可能会有多个,这里选择代价最小最后搜索的为父节点。
坐标A(2,2),目标坐标B(6,3),已经对坐标A进行了估值。
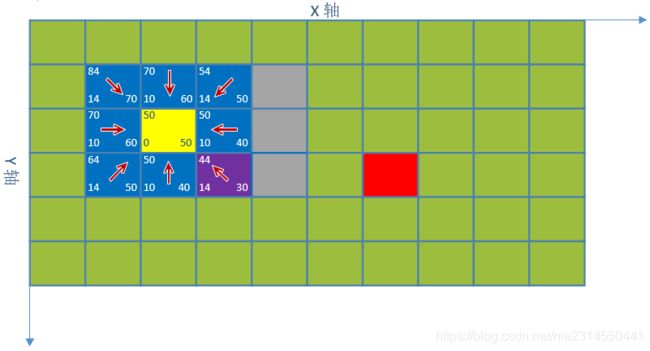
1. 对点(2,2)八个方向的坐标进行估值,它们的父节点都是(2,2),最小估值坐标紫色(3,3),标记紫色只是为了方便下一次寻找。估值顺序我们约定(右,右上,上,左上,左,左下,下,右下),此后我们都按照这个顺序进行。
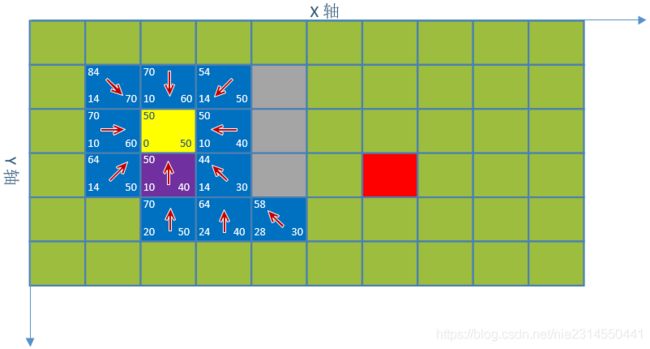
2. 对点(3,3)八个方向的坐标进行估值(已经估值的不用再计算),我们称已经估值的点为已经被访问,最小估值坐标紫色(4,3)。父节点搜索顺序约定(右,右上,上,左上,左,左下,下,右下),g值最小最后访问的点为父节点。如下图。这个图我们需要理解箭头是怎样确定的。例如点(4,3)它的父节点既可以是点(3,3)也可以是点(3,2),访问顺序是先访问点(3,3)后访问点(3,2)所以我们把点(3,2)作为点(4,3)的父节点。
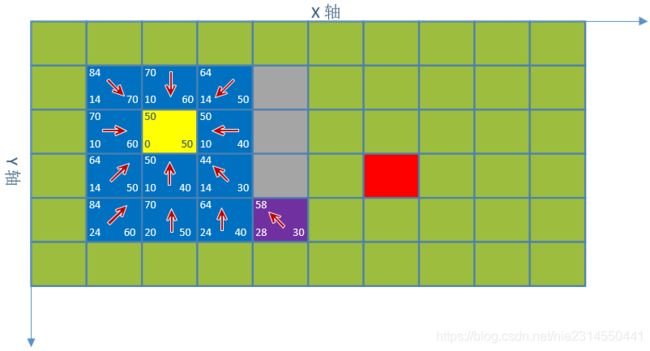
3. 对点(4,3)继续寻找,最小估值坐标紫色(5,3)
4. 对点(5,3)继续寻找,搜索到了终点,停止搜索
5. 通过终点依次查找它们的父节点直到起点,然后将坐标点逆序,就是我们要的路线了。
路线:(2,2)、(3,2)、(4,2)、(5,2)、(6,3)

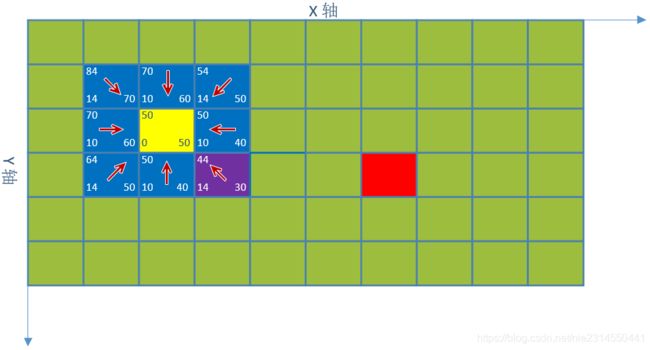
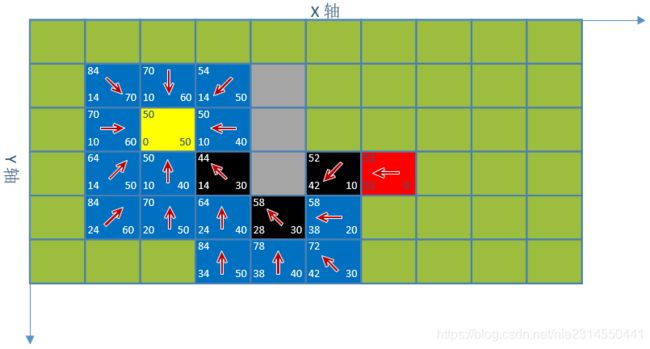
3.4 实例演示二 有障碍物 (对应编码实现中测试用例10)
有无障碍物处理是一样的。
坐标A(2,2),目标坐标B(6,3),已经对坐标A进行了估值。其中坐标(4,1)、(4,2)、(4,3)无障碍物不能访问
1. 对点(2,2)八个方向的坐标进行估值,它们的父节点都是(2,2),最小估值坐标紫色(3,3)
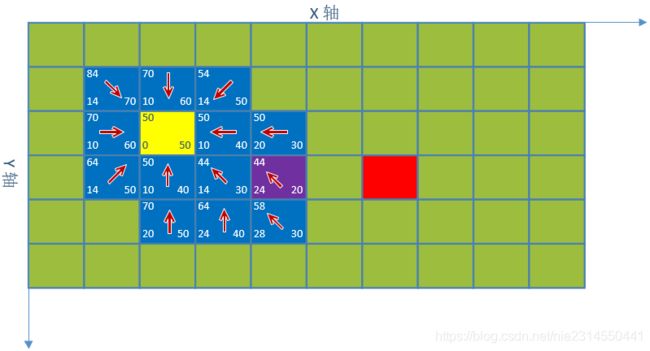
2. 对点(3,3)继续寻找,最小估值坐标紫色(2,3)
3. 对点(3,2)继续寻找,最小估值坐标紫色(4,4)
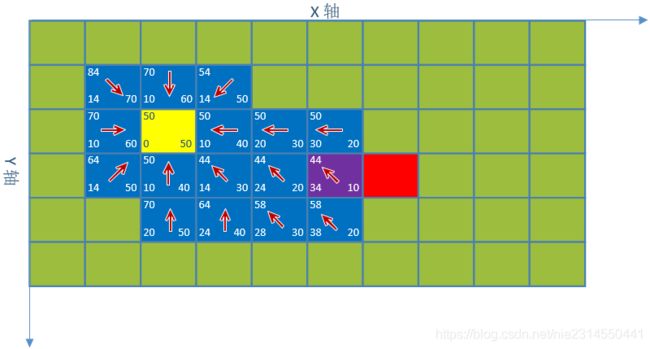
4. 对点(4,4)继续寻找,最小估值坐标紫色(5,3)
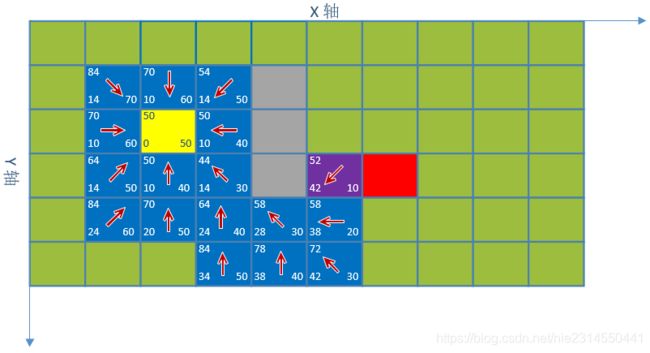
5. 对点(5,3)继续寻找,搜索到了终点,停止搜索
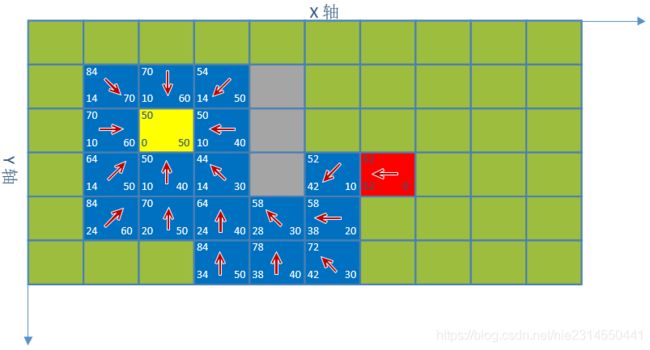
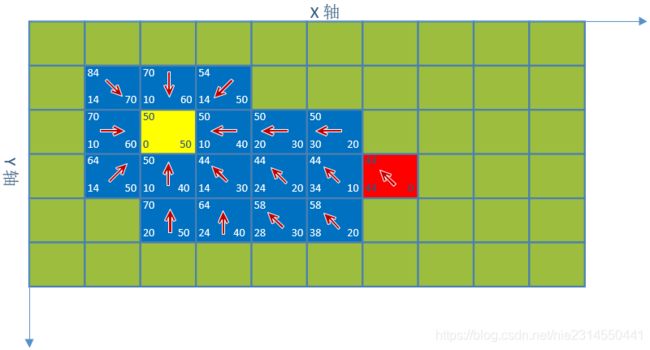
6. 通过终点依次查找它们的父节点直到起点,然后将坐标点逆序,就是我们要的路线了。
路线:(2,2)、(3,3)、(4,4)、(5,3)、(6,3)
四、编码实现
//==========================================================================
/**
* @file : Astar.h
* @author : niebingyu
* @title : A*算法
* @purpose : A*算法实现
*
* 博客:https://blog.csdn.net/nie2314550441/article/details/106733189
*/
//==========================================================================
#pragma once
#include
#include
#include
#include
#include
using namespace std;
#define NAMESPACE_ASTAR namespace NAME_ASTAR {
#define NAMESPACE_ASTAREND }
NAMESPACE_ASTAR
#define GET_ARRAY_LEN(array) (sizeof(array)/sizeof(array[0]))
struct Point
{
int x; // 宽
int y; // 高
Point(int tx = 0, int ty = 0) : x(tx), y(ty) {}
// 两个坐标距离:横坐标距离 + 纵坐标距离
int operator - (const Point& p)
{
return abs(x - p.x) + abs(y - p.y);
}
bool operator == (const Point& p)
{
return x == p.x && y == p.y;
}
};
struct PointV : public Point
{
int value; // 0 :无障碍; 1:有障碍
PointV(int nx = 0, int ny = 0, int v = 0) : Point(nx, ny), value(v) {}
};
struct PointAStart : public Point
{
int f, g, h;
bool visited; // 是否被访问过,0:未被访问,1已经被访问
Point parentNode;
PointAStart(int tf = 0, int tg = 0, int th = 0, int tx = 0, int ny = 0) : Point(tx, ny), f(tf), g(tg), h(th), visited(false), parentNode() {};
bool operator < (const PointAStart& t) { return f < t.f; }
void SetFGH(int tf, int tg, int th) { f = tf; g = tg, h = th; }
};
// 重写仿函数, 优先队列元素大小比较
struct comp //重写仿函数
{
bool operator() (PointAStart* a, PointAStart* b)
{
return a->f > b->f; //小顶堆
}
};
// A* 算法
class AStar
{
public:
// arr 是一个二维数组
// s 起点; e 终点
vector operator()(const vector>& arr, Point s, Point e)
{
if (arr.empty() || s == e)
return {};
int lenY = (int)arr.size() - 1; // 高
int lenX = (int)arr[0].size() - 1; // 宽
if (s.x > lenX || s.y > lenY || e.x > lenX || e.y > lenY)
return {};
if (arr[s.y][s.x] != 0 || arr[e.y][e.x] != 0)
return {};
for (int i = 0; i < lenY; ++i)
assert(lenX == (int)arr[i].size() - 1);
vector> pArr(lenY + 1, vector(lenX + 1)); // 父结点
priority_queue, comp> openList; // by 2020/07/30 改用优先队列
int g = 0, h = (s - e) * 10, f = g + h;
PointAStart pt(f, g, h, s.x, s.y);
pt.visited = true;
pArr[s.y][s.x] = pt;
openList.push(&pArr[s.y][s.x]);
bool seek = true;
const int dirs[8][3] = { {0,1,10},{1,1,14},{1,0,10},{1,-1,14},{0,-1,10},{-1,-1,14},{-1,0,10},{-1,1,14} };//8个移动方向(右,右上,上,左上,左,左下,下,右下)
while (seek && !openList.empty())
{
PointAStart& p = *openList.top();
openList.pop();
p.visited = true;
for (int i = 0; i < GET_ARRAY_LEN(dirs) && seek; ++i)
{
Point t(p.x + dirs[i][1], p.y + dirs[i][0]);
// t 需要未被访问
if (t.x < 0 || t.x > lenX || t.y < 0 || t.y > lenY || arr[t.y][t.x] == 1 || pArr[t.y][t.x].visited)
continue;
// 找父节点
g = p.g + dirs[i][2];
h = (t - e) * 10;
f = g + h;
int minf = f;
PointAStart newPoint(f, g, h, t.x, t.y);
newPoint.visited = 1;
newPoint.parentNode.x = p.x;
newPoint.parentNode.y = p.y;
for (int j = 0; j < GET_ARRAY_LEN(dirs); ++j)
{
Point pp(t.x + dirs[j][1], t.y + dirs[j][0]); //父节点Parent Point
// 父节点pp, 在需要已经被访问
if (pp.x < 0 || pp.x > lenX || pp.y < 0 || pp.y > lenY || arr[pp.y][pp.x] == 1 || !pArr[pp.y][pp.x].visited)
continue;
g = pArr[pp.y][pp.x].g + dirs[j][2];
f = g + h;
if (f <= minf)
{
minf = f;
f = g + h;
newPoint.SetFGH(f, g, h);
newPoint.parentNode = pp;
}
}
pArr[t.y][t.x] = newPoint;
openList.push(&pArr[t.y][t.x]);
if (t == e)
seek = false;
}
}
if (!pArr[e.y][e.x].visited)
{
cout << "无法到达" << endl;
return {};
}
else
{
vector path;
path.push_back(e);
Point p = pArr[e.y][e.x].parentNode;
while (true)
{
if (!pArr[p.y][p.x].visited)
{
cout << "无法到达" << endl;
return {};
}
path.push_back(p);
if (p == s)
break;
p = pArr[p.y][p.x].parentNode;
}
reverse(path.begin(), path.end());
SetVisitedCount(pArr); // 辅助测试,记录访问的结点数
return path;
}
}
// 辅助测试,用于获取访问的结点数
void SetVisitedCount(const vector>& pArr)
{
visitCount = 0;
for (int i = 0; i < pArr.size(); ++i)
{
for (int j = 0; j < pArr[i].size(); ++j)
{
if (pArr[i][j].visited)
++visitCount;
}
}
}
int visitCount;
};
//
// 测试 用例 START
void test(const char* testName, const vector>& arr, Point s, Point e)
{
AStar as;
vector result = as(arr, s, e);
cout << testName << "[" << as.visitCount << ", " << result.size() << "]";
for (int i = 0; i < result.size(); ++i)
{
cout << ", (" << result[i].x << "," << result[i].y << ")";
}
cout << endl;
}
// 测试用例
void Test1()
{
vector> arr =
{
{0,0},
};
Point s(0, 0);
Point e(1, 0);
test("Test1()", arr, s, e);
}
void Test2()
{
vector> arr =
{
{0},
{0}
};
Point s(0, 0);
Point e(0, 1);
test("Test2()", arr, s, e);
}
void Test3()
{
vector> arr =
{
{0,0,},
{0,0,},
};
Point s(0, 0);
Point e(1, 1);
test("Test3()", arr, s, e);
}
void Test4()
{
vector> arr =
{
{0,0,0,},
{0,0,0,},
};
Point s(0, 0);
Point e(2, 1);
test("Test4()", arr, s, e);
}
void Test5()
{
vector> arr =
{
{0,1,0,},
{0,1,0,},
{0,0,0,},
};
Point s(0, 0);
Point e(2, 0);
test("Test5()", arr, s, e);
}
void Test6()
{
vector> arr =
{
{0,0,0,0,0,0,0,0},
{0,0,0,0,1,0,0,0},
{0,0,0,0,1,0,0,0},
{0,0,0,0,1,0,0,0},
{0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0},
};
Point s(2, 2);
Point e(6, 2);
test("Test6()", arr, s, e);
}
void Test7()
{
vector> arr =
{
{0,0,0,0,0,0,0,0},
{0,0,0,0,1,0,0,0},
{0,0,0,0,1,0,0,0},
{0,0,0,0,1,0,0,0},
{0,0,0,0,1,0,0,0},
{0,0,0,0,1,0,0,0},
};
Point s(2, 2);
Point e(6, 2);
test("Test7()", arr, s, e);
}
void Test8()
{
vector> arr =
{
{0,0,0,0,0,0,0,0,0},
{0,0,0,0,1,1,1,1,0},
{0,0,0,0,1,0,0,1,0},
{0,0,0,0,1,0,0,1,0},
{0,0,0,0,1,0,1,1,0},
{0,0,0,0,1,0,0,0,0},
};
Point s(2, 2);
Point e(6, 2);
test("Test8()", arr, s, e);
}
void Test9()
{
vector> arr =
{
{0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0},
};
Point s(2, 2);
Point e(6, 3);
test("Test9()", arr, s, e);
}
void Test10()
{
vector> arr =
{
{0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0},
{0,0,0,0,1,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0},
};
Point s(2, 2);
Point e(6, 3);
test("Test10()", arr, s, e);
}
void Test11()
{
vector> arr =
{
{0,0,0,0,1,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,1,0,0,1,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,1,0,0,1,0,0,0,1,0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,1,0,0,1,0,0,0,1,0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,1,0,0,1,0,0,0,1,0,0,0,0,1,0,0,1,1,1,0,0,0,0,0,0,0,0},
{0,1,0,0,1,0,0,0,1,0,0,0,0,1,0,0,1,0,1,0,0,0,0,0,0,0,0},
{0,1,0,0,1,0,0,0,1,0,0,0,0,1,0,0,1,0,1,0,0,0,0,0,0,0,0},
{0,1,0,0,1,0,0,0,1,0,0,0,0,1,0,1,1,0,1,0,0,0,0,0,0,0,0},
{0,1,1,1,1,0,0,0,1,0,0,0,0,1,0,1,0,0,1,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,1,0,0,0,0,1,0,1,0,0,1,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,1,0,0,0,0,1,0,1,0,0,1,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,1,0,0,0,0,1,1,1,0,0,1,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0},
{0,0,0,0,0,0,0,0,0,0,0,0,0,1,0,0,0,0,0,0,0,0,0,0,0,0,0},
};
Point s(2, 7);
Point e(17, 5);
test("Test11()", arr, s, e);
}
NAMESPACE_ASTAREND
// 测试 用例 END
//
void AStar_Test()
{
#if 1
NAME_ASTAR::Test1();
NAME_ASTAR::Test2();
NAME_ASTAR::Test3();
NAME_ASTAR::Test4();
NAME_ASTAR::Test5();
NAME_ASTAR::Test6();
NAME_ASTAR::Test7();
NAME_ASTAR::Test8();
NAME_ASTAR::Test9();
NAME_ASTAR::Test10();
NAME_ASTAR::Test11();
#endif
//NAME_ASTAR::Test9();
}
执行结果:

五、拓展
5.1 如果现在需求有变,不能沿对角线移动,也就是只能上下左右移动,需要怎样实现呢?
修改第82行代码 const int dirs[8][3] = { {0,1,10},{1,1,14},{1,0,10},{1,-1,14},{0,-1,10},{-1,-1,14},{-1,0,10},{-1,1,14} };//8个移动方向(右,右上,上,左上,左,左下,下,右下)
改为 const int dirs[4][3] = { {0,1,10},{1,0,10},{0,-1,10},{-1,0,10} };//8个移动方向(右,上,左,下)
5.2 需求再变动一下,只能沿着上下左右移动,但向右可以一次移动1格或者2格,需要怎样实现呢?
同理修改第82行代码 const int dirs[8][3] = { {0,1,10},{1,1,14},{1,0,10},{1,-1,14},{0,-1,10},{-1,-1,14},{-1,0,10},{-1,1,14} };//8个移动方向(右,右上,上,左上,左,左下,下,右下)
改为 const int dirs[5][3] = { {0,1,10}, {0,2,20},{1,0,10},{0,-1,10},{-1,0,10} };//8个移动方向(右1格,右2格,上,左,下)
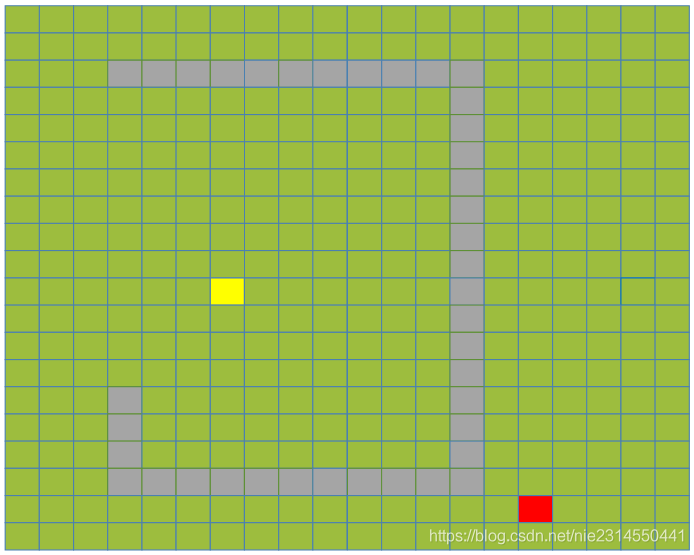
六、闲谈
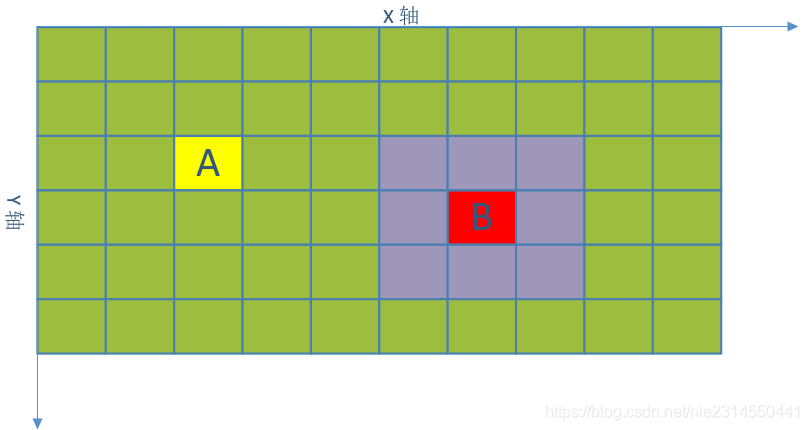
前面我们介绍的都是起点去找终点,观察一下下面这种情况,黄色是起点,红色是终点。起点找终点会搜索大量无用的坐标点,而如果是终点去寻找起点搜索需要坐标点会少很多。那我们可不可以起点和终点一起去寻找对方呢?
参考:https://blog.csdn.net/nie2314550441/article/details/106673966
https://zhuanlan.zhihu.com/p/23199073
2020/6/14 补充说明
六、延伸扩展
已经知道A*算法过程,再逆序思索一下这个算法。起点A,终点B,假设存在一条最优的路线能从A到B。
我们继续观察这个图,如果存在最优路线。到达B的上一个坐标点一定是B点周围的一个坐标称之为父节点。也就是我们只需要找到这个点父节点。这种思路不就是动态规划中的自顶向下。自顶向下效率不佳,我们将其转换成自底向上求解就可以了。我们在求解动态规划问题往往都是计算最终结果,如果需要求解这个过程是怎样的呢?
A*算法就是这个问题的自底向上求解的过程。A*算法给我们提供了一个很好的思路,我们只需要记录当前结果产生的父节点,通过父节点倒推这个过程。例如《算法导论——钢条切割》需要求解的是最大价值,那最多价值切割的方法是怎样呢?可以通过上面说的方法求解。
可以理解A*算法 是结合了 深度优先、广度优先、以及动态规划的思想。个人理解。