GBDT原理解析:为什么说GBDT是拟合残差的梯度下降算法
写这篇博客是因为博主花了一天时间在网上找GBDT的原理解析,但发现所有介绍GBDT的文章都没有说清楚,尤其没有让博主明白为什么GBDT的每一步学习是基于之前的错误学习的,是在拟合残差。于是博主只好又花半天时间读了Friedman的原文的前半部分(后半部分开始介绍正则化、变量重要性定义和模拟实验了,没细看),感觉终于懂了80%-90%。博主觉得一定要把这个理解记下来,以便以后复习。
本博客主要参考论文Greedy Function Approximation: A Gradient Boosting Machine的1-4节,算是翻译+自己的理解。本文中还有部分图片来自这篇博客,该博客前面铺垫的知识讲得很好,但是对GBDT的原理推导却不够细
对机器学习基础的概念的介绍这里跳过,直接进入主题:GBDT是什么,为什么它是拟合残差的梯度下降算法
GBDT全名Gradient Boosting Decision Tree,从名字来看其实包含了三部分内容:
1)Gradient,代表了算法中的梯度下降思想
梯度下降是迭代优化的算法,其过程为
1,随机选择一个初始点w0
2,根据损失函数L和待优化参数w算出L相对于w在当前点的梯度d,梯度的负方向就是在当前点损失函数减小最多的方向
3,选择步长ρ![]()
4,更新参数w=w+ρd![]()
5,重复2-4步,直到满足停止条件。停止条件一般为梯度=0,或损失函数的减小成都小于一个阈值
2)Boosting,代表了算法中进行集成学习的思想
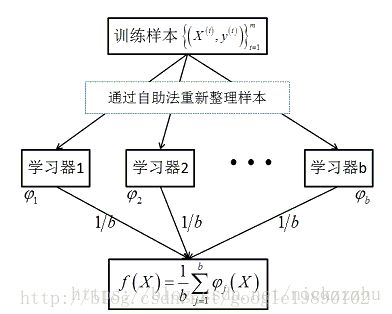
Boosting是用来提高弱分类器准确度的算法,其通过构造一系列弱分类器,以一定方式将他们组合成预测函数。Boosting和bagging是不同的。Bagging通过对样本多次采样(采样时样本可重复),并多次训练得到一系列学习器,最终通过平均的方法(如对于回归问题取平均,对于分类问题进行投票)得到学习结果。在bagging中,多个学习器之间是独立的,因此容易并行进行。Bagging的代表是随机森林,其示意图如下:
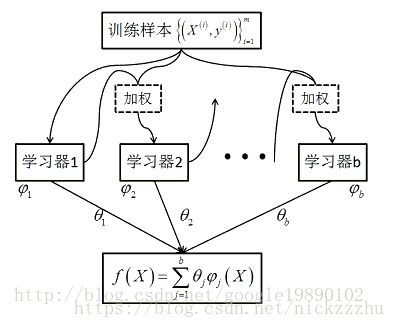
Boosting也生成一系列学习器,但生成过程是有依赖关系的。不同的boosting在生成过程中会对样本权重、学习器权重等有不同的处理,如XGBOOST,GBDT,ADABOOST在细节上不同。总的来说后一个学习器依赖前一个学习器的结果而生成,其示意图如下:
3,Decision Tree,代表了一类函数空间,Gradient和Boosting都是在Decision Tree上操作的。在GBDT中,最常用的决策树概念是CART,这是一种二叉回归树,它的损失函数是目标和预测值的欧氏距离
有监督学习、Gradient Decent、Boosting相结合:
以下最速下降、梯度下降、steepest-descent我是等价来用的,我理解梯度下降也是在局部点寻找函数下降最快的方向(就是梯度方向)并下降。论文原文中使用的是最速下降。
有监督学习就是要找到X到Y的映射F,使损失函数L最小。

一般来说,限制F是一个特定的函数模式,寻找参数P确定唯一的F。对于boosting方法,就是寻找以下形式
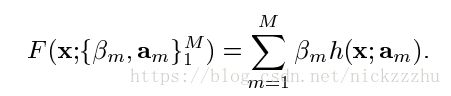
h是以a参数化的关于x的方程,不同的a确定了不同的单个h
对于参数化模型,寻找最佳方程的问题就变成寻找最佳参数P,使得损失函数最小。也就是:
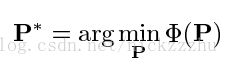
其中损失函数为

根据以上条件得到的最佳近似函数为
对于大多数的F和L,使用数值方法求解,得到以下解的形式
其中p0是初始化值,pm是一系列连续的提升,可以认为是steps或boost,每一步都基于上一步。对于最速下降法,也就是梯度下降来说,求参数P的过程时首先定义pm的算法:
计算经过m-1步后的梯度
根据梯度计算pm值
其中gm是梯度方向, 是使得损失函数在梯度方向下降最小的步长,可以使用线搜索方法得到。
是使得损失函数在梯度方向下降最小的步长,可以使用线搜索方法得到。
对函数空间的优化
当应用以上数值优化方法到函数空间时,将整个函数F看成参数,因此对应了以下问题形式
损失函数为

F的形式为
F0是初始化值,fm是一系列提升。类似于参数的最速下降(梯度下降),在函数空间的最速下降是
其中下降的方向,即梯度是

经过m-1步得到的方程是
其中梯度g是期望的导数,可以变形为对不同数据点导数的期望:

同样的,最佳步长通过线搜索策略得到

有限数据集下的优化问题
以上函数空间的推导都是无参数化的,在有限数据中寻找(近似)最优解F需要对F进行参数化。例如将F用h进行参数化后,问题变为求解参数,使得损失函数最小

类似于gradient decent,使用greedy-stagewise的方法确定每一步m的最优参数

之后将h带入得到F

注意将stagewise和stepwise区分,stepwise每一步都更改之前的参数值,而stagewise每一步新加一个fm,但是之前确定的Fm-1不变
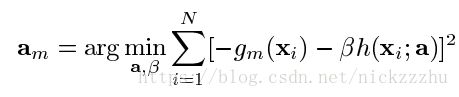
求解F还是一个对函数空间,将F看成参数的梯度下降过程。但是因为将F用h进行了参数化,所以F受到了限制,其每一步的更新必须在h的函数族内。而我们在第m步求梯度时得到的梯度方向公式为:

这是一个不依赖于hm,仅依赖于损失函数L,Fm-1和N个数据点(X,Y)的非参数化的式子。它表明了在每一步,基于已有数据的梯度方向。如果不考虑寻找最佳参数,沿着这个方向下降的损失函数较小最快。但现在参数化的h被限制了,而我们梯度下降时只能沿着hm下降,所以我们希望在hm尽可能地接近gm方向, 也就是hm尽可能让损失函数在m步最小化。当我们用欧式距离度量gm和hm时,寻找hm最佳参数的问题就变成
求得hm的参数后,用这个被限制了函数形式的hm代替gm,进行梯度下降更新。对于步长,同样是在梯度下降更新时使用线搜索:

得到步长和梯度方向后,更新映射F
![]()
在这里,gm是非参数化的,完全基于数据的最优梯度方向;计算hm和gm的欧氏距离,并寻找参数最小化之就是用hm去拟合gm,因此可以把gm看成pseudo-response。对于任意可导的损失函数L,使用steepest-descent求最佳函数F的算法:
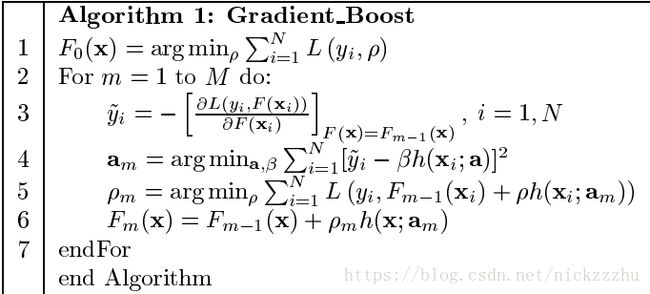
1,初始化F0
2,设定M步循环,在每个循环m中
- 计算损失函数L关于已有函数Fm-1得基于所有数据点的导数
 ,这就是第m步参数要拟合的pseudo-response,gm
,这就是第m步参数要拟合的pseudo-response,gm - 根据欧氏距离,将第m个函数fm=h和gm拟合,求距离最小化的参数am,这里可以得到类似梯度下降算法的梯度hm
- 根据线搜索算法求最佳步长
 ,得到类似于梯度下降算法中的步长
,得到类似于梯度下降算法中的步长 - 结合已有的Fm-1,用梯度和步长更新之
算法结束
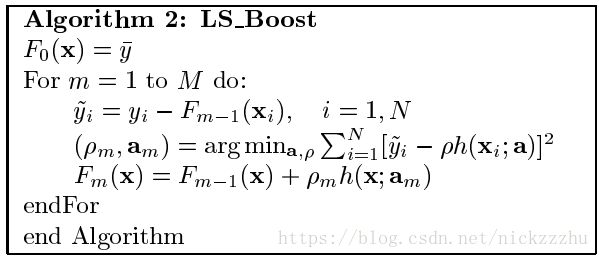
此处终于可以解释GBDT在拟合残差是什么意思:每一步拟合pseudo-response而非拟合y,当损失函数L为RMSE时(即一般的回归的损失函数,也是CART的损失函数),gm就是对二次式求导,就是y-y_hat,也就是预测值和真实值的残差。所以说GBDT算法每一步优化都是在拟合残差。因此对于Least-Square Regression,算法如下:

引入决策树
当参数化函数h是树时,假设它有J个叶子节点,则h可以写成
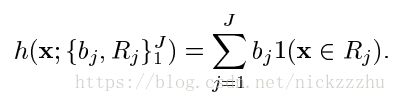
(b,R)组成了h的参数。其中b是叶子节点的回归值,R是将点x映射到叶子节点的路径。F变成
R是到不同叶子节点的路径, ,
,![]() 是pseudo-response,
是pseudo-response,![]() 用线搜索得到。F写成
用线搜索得到。F写成
其中![]()
由于hm是树,所以一个hm可以看成是J个相互隔离的方程,所以寻找最优的hm就是寻找最优的,相互独立的方程

原本的优化问题变成了

所以问题就变成了根据Fm-1和损失函数L,更新树的每个叶子节点的常数值,是的m步的损失最小
在看论文原文的时候存在很多疑问,其中一个最大的疑问就是:![]() 是什么。这里我对比GBDT中函数更新公式和基础的梯度下降将其理解为更新梯度的步长,但是并不确定。梯度下降中步长是超参数,不是根据数据学习的,这里的
是什么。这里我对比GBDT中函数更新公式和基础的梯度下降将其理解为更新梯度的步长,但是并不确定。梯度下降中步长是超参数,不是根据数据学习的,这里的![]() 是需要根据数据优化的。此外,在看XGBOOST原理时,线搜索是用在寻找最佳树结构上的,而这里是寻找最佳
是需要根据数据优化的。此外,在看XGBOOST原理时,线搜索是用在寻找最佳树结构上的,而这里是寻找最佳![]() 。如果是步长,该怎么用线搜索寻找最佳步长
。如果是步长,该怎么用线搜索寻找最佳步长