【嵌入式Linux驱动开发】三、点亮LED,初探驱动与硬件交互
总盯着过去,你会瞎掉一只眼;然而忘掉历史,你会双目失明。
文章目录
- 一、IMX6ULL的GPIO操作流程
-
- 1.1 IMX6ULL 的 GPIO 模块结构
- 1.2 各个模块含义及具体操作
-
- 1.2.1 CCM模块 - 向 GPIO 模块提供时钟
- 1.2.2 IOMUXC模块 - 控制引脚的复用模式及电气属性
- 1.2.3 GPIO模块
- 1.3 GPIO的读写操作步骤
-
- 1.3.1 读GPIO
- 1.3.2 写GPIO
- 二、LED的驱动框架
- 三、编写代码
- 四、运行
-
- 4.1、qemu开发板
- 4.2、ATK-IMX6ULL开发板
一、IMX6ULL的GPIO操作流程
1.1 IMX6ULL 的 GPIO 模块结构
阅读IMX6ULL的参考手册,我们可以知道IMX6ULL共有 5 组 GPIO( GPIO1~GPIO5),每组引脚最多有 32 个,但是可能实际上并没有那么多。
| 组别 | 引脚 |
|---|---|
| GPIO1 有 32 个引脚: | GPIO1_IO0~GPIO1_IO31; |
| GPIO2 有 22 个引脚: | GPIO2_IO0~GPIO2_IO21; |
| GPIO3 有 29 个引脚: | GPIO3_IO0~GPIO3_IO28; |
| GPIO4 有 29 个引脚: | GPIO4_IO0~GPIO4_IO28; |
| GPIO5 有 12 个引脚: | GPIO5_IO0~GPIO5_IO11; |
GPIO 的控制涉及 3 大模块: CCM、 IOMUXC、 GPIO 模块本身,框图如下:

1.2 各个模块含义及具体操作
- CCM: Clock Controller Module (时钟控制模块)
- IOMUXC : IOMUX Controller, IO 复用控制器
- GPIO: General-purpose input/output,通用的输入输出口
1.2.1 CCM模块 - 向 GPIO 模块提供时钟
GPIOx 要用 CCM_CCGRy 寄存器中的 2 位来决定该组 GPIO 是否使能。各组GPIO的具体时钟控制寄存器如下所示。
- GPIO1、 GPIO5 时钟控制寄存器

-
GPIO2时钟控制寄存器

-
GPIO3时钟控制寄存器

-
GPIO4时钟控制寄存器
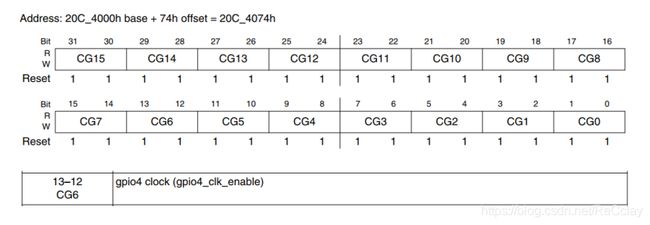
而CCM_CCGR 寄存器中某 2 位的取值含义如下:

- ① 00:该 GPIO 模块全程被关闭
- ② 01:该 GPIO 模块在 CPU run mode 情况下是使能的;在 WAIT 或 STOP 模式下,关闭。
- ③ 10:保留
- ④ 11:该 GPIO 模块全程使能
1.2.2 IOMUXC模块 - 控制引脚的复用模式及电气属性
| 一个引脚寄存器 | 作用 |
|---|---|
| IOMUXC_SW_ MUX _ CTL_PAD_< PADNAME > | 选择某个 引脚的复用模式 |
| IOMUXC_SW_ PAD _ CTL_PAD_< PADNAME > | 选择某个 引脚的电气属性 |
- IOMUXC_SW_ MUX _ CTL_PAD_< PADNAME >:选择某个引脚的复用模式
-
一个引脚对应一个寄存器(前缀MUX)

-
每个引脚都有8个可选的模式(alternate (ALT) MUX_MODE)

-
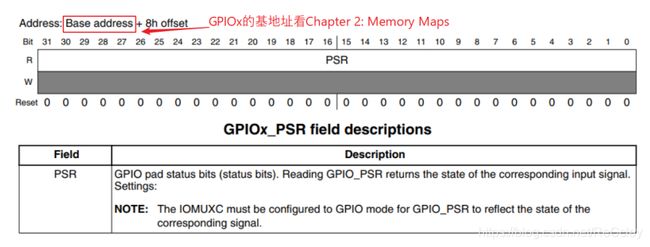
顺便一提,上图中的loopback 功能(回环测试)。设置该引脚的 loopback 功能,这样就可以从 GPIOx_PSR 中读到引脚的有实电平!
因为从 GPIOx_DR 中读回的只是上次设置的值,它并不能反应引脚的真实电平。假若硬件故障导致该引脚与地短路了,通过设置 GPIOx_DR让它输出高电平并不会起效果,这时我们通过读取GPIOx_PSR便可知道该引脚的真实输出状态!
- IOMUXC_SW_ PAD _ CTL_PAD_< PADNAME >: 选择某个引脚的电气属性
-
也是一个引脚对应一个寄存器(前缀PAD)

-
设置电气属性

-
1.2.3 GPIO模块
框图如下
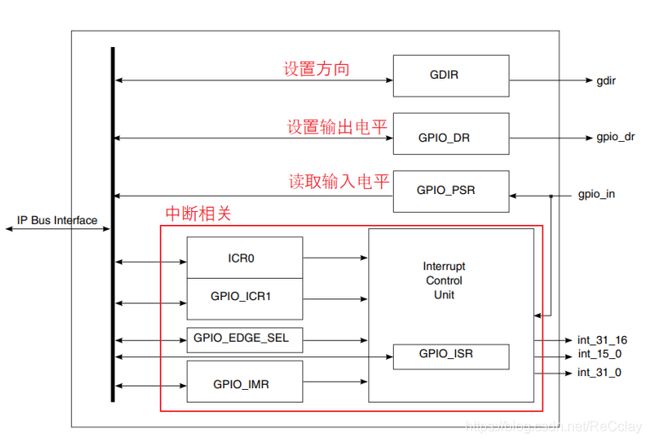
主要关心3个寄存器:
- ① GPIOx_GDIR:设置引脚方向,每位对应一个引脚, 1-output, 0-input

-
② GPIOx_DR:设置输出引脚的电平,每位对应一个引脚, 1-高电平, 0-低电平

-
③ GPIOx_PSR:读取引脚的电平,每位对应一个引脚, 1-高电平, 0-低电平
1.3 GPIO的读写操作步骤
1.3.1 读GPIO
- ① 设置 CCM_CCGRx 寄存器中某位使能对应的 GPIO 模块
- ② 设置 IOMUX 来选择引脚用于 GPIO
- ③ 设置 GPIOx_GDIR 中某位为 0,把该引脚设置为输入功能
- ④ 读 GPIOx_DR 或 GPIOx_PSR 得到某位的值(读 GPIOx_DR 返回的是 GPIOx_PSR 的值)
1.3.2 写GPIO
- ① 设置 CCM_CCGRx 寄存器中某位使能对应的 GPIO 模块
- ② 设置 IOMUX 来选择引脚用于 GPIO
- ③ 设置 GPIOx_GDIR 中某位为 1,把该引脚设置为输出功能
- ④ 写 GPIOx_DR 某位的值
二、LED的驱动框架
上一节的Hello驱动,并没有实际操作硬件,而LED点灯驱动操作硬件势在必行。这时就有一个问题需要考虑了,APP应用程序只是调用驱动程序的接口,这个不涉及具体硬件,所以无可厚非。而驱动程序肯定要操作硬件,这时如果把硬件的寄存器操作与驱动程序混在一起编写,那么我们的驱动程序的可移植性将会变得特别差。当硬件发生变动时,我们需要更改驱动程序!这显然不是我们想要的结果,那怎么样才能实现应用程序通用,驱动程序也通用呢?分层!
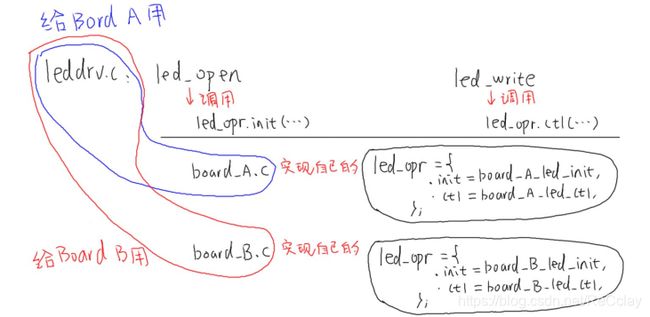
即把驱动拆分为通用的框架(leddrv.c)、具体的硬件操作(board_X.c),如下图所示。
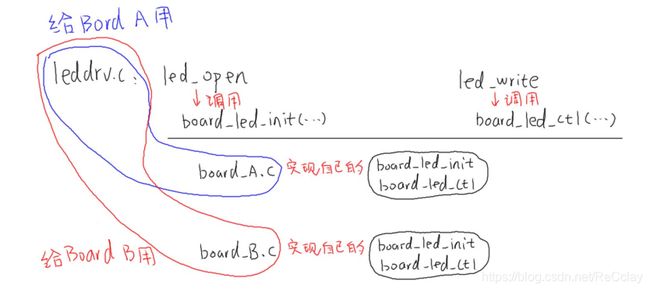
分别为不同板子,编写具体的硬件操作代码!每个单板的具体硬件操作分为:LED初始化(board_led_init)和LED控制(board_led_ctrl)!而这两个函数我们又可以将其定义为一个结构体,供上层的leddrv.c调用,于是下图所示框架。
三、编写代码
leddrv.c
#include LED驱动程序说明:
- 驱动程序和上一节的Hello驱动大差不差,核心依然是 file_operations 结构体。
- 我们创建了2个LED,这两个主设备号一样,区分主要靠次设备号!
- 在入口函数中,从底层硬件相关的代码 board_qemu.c 中获得 led_operaions 结构体,相应的别忘了包含头文件led_opr.h
- 然后通过for循环运行device_create函数,初始化led_operaions结构体中的num个LED设备
- 在入口函数中,先创建类,再创建结构体。在出口函数中,需要先销毁结构体,再销毁类!
- open,close函数中可以直接通过
iminor(node)获得设备的此设备号 - write,read函数中需要先通过
file_inode(file)获得node节点,然后再通过iminor(node)获得设备的次设备号!
board_qemu.c
#include 单板程序编程步骤
- ① 看原理图确定引脚,确定引脚输出什么电平才能点亮/熄灭 LED
- ② 看主芯片手册,确定寄存器操作方法:哪些寄存器?哪些位?地址是?
- ③ 编写驱动:先写框架,再写硬件操作的代码
GPIO单板控制说明
- 先来上单板要控制的LED原理图,

- 在芯片手册中确定的寄存器地址被称为物理地址,在 Linux 内核中无法直接使用。需要使用内核提供的 ioremap 把物理地址映射为虚拟地址,使用虚拟地址。
- 实际上,它是按页(4096 字节)进行映射的,是整页整页地映射的。假设 phys_addr = 0x10002, size=4, ioremap 的内部实现是:
- a. phys_addr 按页取整,得到地址 0x10000
- b. size 按页取整,得到 4096
- c. 把起始地址 0x10000,大小为 4096 的这一块物理地址空间,映射到虚拟地址空间,假设得到的虚拟空间起始地址为 0xf0010000
- d. 那么 phys_addr = 0x10002 对应的 virt_addr = 0xf0010002
- 不再使用该段虚拟地址时,要 iounmap(virt_addr):【本程序暂时未释放,下一篇优化!】
- 实际上,它是按页(4096 字节)进行映射的,是整页整页地映射的。假设 phys_addr = 0x10002, size=4, ioremap 的内部实现是:
- 需要理解iomux开始偏移23个int的原因,23个int即23x4=92=0x5C。而IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO00 地址是 20E_0000h base + 5Ch
- GPIO1,GPIO5 他们两个都是由CCGR1来控制的!
- 值得一提的是,IOMUXC_SNVS_SW_MUX_CTL_PAD_SNVS_TAMPER3复用GPIO时只有一种即GPIO5_IO03
- 另外注意程序中使用的volatile关键字:防止编译器优化,详细介绍参考这里。
led_opr.h
#ifndef _LED_OPR_H
#define _LED_OPR_H
struct led_operations {
int num; /* num-LED数量 */
int (*init) (int which); /* 初始化LED, which-哪个LED */
int (*ctl) (int which, char status); /* 控制LED, which-哪个LED, status:1-亮,0-灭 */
};
struct led_operations *get_board_led_opr(void);
#endif
led_operations 需要说明的:
- 该头文件定义led_operations结构体,注意它的写法想不想file_operation呢?细细体会!
- 声明了led_operations返回函数get_board_led_opr
ledtest.c
#include \n" , argv[0]);
return -1;
}
/* 2. 打开文件 */
fd = open(argv[1], O_RDWR);
if (fd == -1)
{
printf("can not open file %s\n", argv[1]);
return -1;
}
/* 3. 写文件 */
if (0 == strcmp(argv[2], "on"))
{
status = 1;
write(fd, &status, 1);
}
else
{
status = 0;
write(fd, &status, 1);
}
close(fd);
return 0;
}
应用程序需要说明的是:
- 这个跟之前的Hello驱动也差不多,为了方便理解程序,把一些判断都删除了。
- strcmp字符串比较函数可以借鉴一下!
Makefile
KERN_DIR = /home/clay/linux/qemu/kernel/100ask_imx6ull-qemu/linux-4.9.88
all:
make -C $(KERN_DIR) M=`pwd` modules
$(CROSS_COMPILE)gcc -o ledtest ledtest.c
clean:
make -C $(KERN_DIR) M=`pwd` modules clean
rm -rf modules.order
rm -f ledtest
# 参考内核源码drivers/char/ipmi/Makefile
# 要想把a.c, b.c编译成ab.ko, 可以这样指定:
# ab-y := a.o b.o
# obj-m += ab.o
# leddrv.c board_qemu.c 编译成 led.ko
led-y := leddrv.o board_qemu.o
obj-m += led.o
Makefile需要说明的:
- 这一次把应用程序的编译一并加入了Makefile
- 注意这次驱动涉及多文件,最后两行的写法需要体会!
四、运行
4.1、qemu开发板
编译程序没有问题后,运行qemu虚拟开发板,并做好准备工作!将
- 拷贝led.ko和ledtest到NFS中
cp *.ko ledtest ~/linux/qemu/NFS/
- 在qemu终端,加载led.ko文件
insmod led.ko
- 在qemu终端,运行应用程序打开LED0
./ledtest /dev/led0 on

- 在qemu终端,运行应用程序关闭LED0
./ledtest /dev/led0 off

其余三盏灯,操作分别用led1 led2 led3即可,这里不再一一演示。
4.2、ATK-IMX6ULL开发板
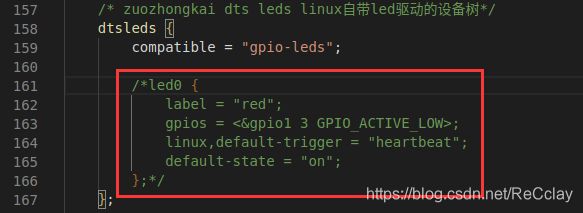
需要注意的是,如果使用正点原子开发板点亮LED之前,要先关闭设备树中的自带LED,屏蔽内容如下图。
- 拷贝驱动,ko文件和应用程序文件到文件系统
cp -rf *.ko led ~/nfs/rootfs/lib/modules/4.1.15/
- 接着,依次执行下面命令加载led.ko驱动模块
depmod //第一次加载驱动的时候需要运行此命令modprobe led.ko //加载驱动
- 输入以下命令控制LED(GPIO1_IO03)
./led /dev/led1 on./led /dev/led1 off
- 卸载驱动模块
rmmod led.ko
嘻嘻,好长的一篇~