重力传感器方向
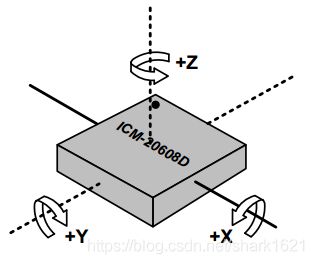
有8种贴片方式,正面四种,反面四种。
因此在代码中就需要调整x轴y轴,或者x轴,y轴的正反方向。
mtk下实现方法如下:
首先在dts种设置方向,direction即为方向:
/* sensor standardization */
cust_accel@0 {
compatible = "mediatek,bma222e_new";
i2c_num = <2>;
i2c_addr = <0x18 0 0 0>;
direction = <6>; //0->6
power_id = <0xffff>;
power_vol = <0>;
firlen = <0>;
is_batch_supported = <0>;
};
在driver代码中,根据dts中给定的direction可以获取cvt:
err = hwmsen_get_convert(obj->hw.direction, &obj->cvt);cvt为如下数据:
struct hwmsen_convert map[] = {
{ { 1, 1, 1}, {0, 1, 2} },
{ {-1, 1, 1}, {1, 0, 2} },
{ {-1, -1, 1}, {0, 1, 2} },
{ { 1, -1, 1}, {1, 0, 2} },
{ {-1, 1, -1}, {0, 1, 2} },
{ { 1, 1, -1}, {1, 0, 2} },
{ { 1, -1, -1}, {0, 1, 2} },
{ {-1, -1, -1}, {1, 0, 2} },
};以此为例direction为6,cvt即为{1,-1,-1} 方向, {0,1,2} xyz3轴是否需要交换
下列代码为最终进行数据重调整的代码
/*remap coordinate*/
acc[obj->cvt.map[MPU6050_AXIS_X]] = obj->cvt.sign[MPU6050_AXIS_X]*obj>data[MPU6050_AXIS_X];
acc[obj->cvt.map[MPU6050_AXIS_Y]] = obj->cvt.sign[MPU6050_AXIS_Y]*obj>data[MPU6050_AXIS_Y];
acc[obj->cvt.map[MPU6050_AXIS_Z]] = obj->cvt.sign[MPU6050_AXIS_Z]*obj>data[MPU6050_AXIS_Z];参考文档:https://blog.csdn.net/qq_38750572/article/details/103807126