迪杰斯特拉最全详解(朴素版,堆优化+邻接表存图/链式前向星存图)
迪杰斯特拉
- 迪杰斯特拉算法分析
-
- 迪杰斯特拉(朴素版)
- 迪杰斯特拉堆优化(邻接表存图)
- 迪杰斯特拉堆优化(链式前向星存图)
- 最短路——spfa(链式前向星存图)
迪杰斯特拉算法分析
一般用三种数据结构存图,即邻接矩阵,邻接表,链式前向星
1.邻接矩阵
用二维数组储存即可int graph[maxn][maxn];, graph[i][j]储存结点i到j边的权值优点
适合稠密图,编码非常简短,对边的存储,查询,更新等操作又快又简单,只需要一步就能访问和修改。
缺点
- 存储复杂度O(V^2)太高
- 一般情况下不能存储重边
2.邻接表
一些规模大的稀疏图一般用邻接表存储。优点
他的优点是存储效率非常高,只需要与边数成正比的空间,存储的复杂度是O(V+E),几乎已经达到了最优复杂度,而且能存储重边
缺点
编程比邻接矩阵麻烦一些,访问和修改也慢一些
一般用STL的vector(动态数组)实现了邻接表
- 首先对边赋值
- 用e[i]:存第i个结点连接的所有边
- 把边(a,b)存到结点a的邻接表中
- 结点u的邻居有e[u].size()个
3.链式前向星
链式前向星是在邻接表的基础上优化的,对于一些空间极其紧张的题,用链式前向星是最好的,它用静态数组模拟邻接表,没有任何浪费,因此它是空间效率最高的存储的方法
- 对于边而言,边的终点是to,权值是w,下一个边next,起点放在head[]中
- head[u]指向结点u的第一个边的存储位置
- 用cnt记录edge[]的末尾的位置,新加入的边放在末尾
链式前向星的优点是存储效率高,程序简单,能存储重边,缺点是不方便做删除操作
适用范围
迪杰斯特拉算法适用于——单元最短路径问题,单终点最短距离,单对顶点最短路径问题,每对顶点间最短路径问题
基本思想
- Dijkstra算法:一个安路径长度递增地次序产生最短路径的算法
- 每次扩展一个距离最短的点,更新与其相邻的点的距离
- 当所有边的权值都为正数时,由于不会存在一个距离更短的没扩展过的点,所以这个点的距离永远不会再被改变,保住了算法的正确性。如果存在负权值的路径,那么考虑spfa算法跑最短路。
- 有向图和无向图都可以使用这个算法,无向图的每条边可以看成相反的两条边
- 引入松弛操作,让源点s到顶点的距离dis[i]取一个很大的值,然后不断减小dis[i],当所有的dis[i]不能再减小时,就求出了s到所有点的最短路径。松弛操作的目的就是减小dis[i]的值,如果从s到达i有更优的路径则更新dis[i]。
if (dis[v] > dis[u] + e[i].w)
{
dis[v] = dis[u] + e[i].w; //松弛操作
q.push((node){
dis[v], v}); //把新遍历的到的点加入堆中
}

dijkstar的原理与流程
- dijkstra本质上的思想是贪心,它只适用于不含负权边的图.
- 我们把点分成两类,一类是已经确定最短路径的点,称为"白点",另一类是未确定最短路径的点,称为"蓝点"
- 初始化dis[start] = 0,dis[start]=0,其余节点的dis值为无穷大.
- 找一个disdis值最小的蓝点x,把节点x变成白点.
- 遍历x的所有出边(x,y,z),若dis[y] > dis[x] + z,则令dis[y] = dis[x] + z
- 重复2,3两步,直到所有点都成为白点…
- 时间复杂度为O(n^2)
举例
友情提示以下图片参考洛谷—最短路在此鸣谢~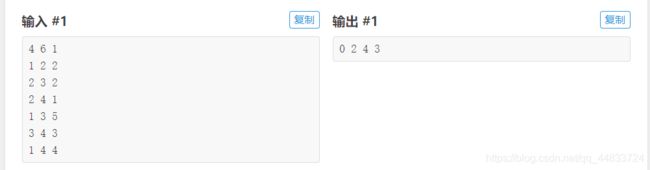
1.(令start = 1)
2.开始时我们把dis[start]初始化为0,其余点初始化为inf

第一轮循环找到dis值最小的点1,将1变成白点,对所有与1相连的蓝点的dis值进行修改,使得dis[2]=2,dis[3]=4,dis[4]=7

第二轮循环找到dis值最小的点2,将2变成白点,对所有与2相连的蓝点的dis值进行修改,使得dis[3]=3,dis[5]=4

第三轮循环找到dis值最小的点3,将3变成白点,对所有与2相连的蓝点的dis值进行修改,使得dis[4]=4

接下来两轮循环分别将4,5设为白点,算法结束,求出所有点的最短路径
为什么dijkstra不能处理有负权边的情况

- 2到3的边权为-4,显然从1到3的最短路径为-2 (1->2->3)…但在循环开始时程序会找到当前dis值最小的点3,并标记它为白点
- 这时的dis[3]=1,然而1并不是起点到3的最短路径.因为3已经被标为白点,所以dis[3]不会再被修改了.我们在边权存在负数的情况下得到了错误的答案.
下面有一个例题(单源最短路径的模板题)
题目描述
编程实现Dijkstra算法,求一个有向加权图中,从源点出发到其他各个顶点的最短路径。
输入
第1行第1个值表示顶点个数,第2个值表示边个数;第2行开始为边(两个顶点,边的起点和终点)及权重。
输出
顶点0到每一个顶点的最短路径长度。
样例输入
5 7
0 1 10
0 3 30
0 4 100
1 2 50
2 4 10
3 2 20
3 4 60
样例输出
0 10 50 30 60
PS:这个题目是一个模板题,但是它默认源点是0点,所以在输入的时候没有输入源点,一般的代码都是输入三个数,顶点数,边数,与源点,代码基本一样,只要改一下一点点代码就行——如果想要源点从键盘输入,那么增加一个输入,并把起点放入队列或者动态数组里面就行。
迪杰斯特拉(朴素版)
#include 定义一个优先队列加结构体重载小于号,就相当于一个小根堆了,重载把大的放在前面,然后再把排好序的数据放入优先队列那么大的就在根底了,也就形成了一个小根堆
迪杰斯特拉堆优化(邻接表存图)
#include 迪杰斯特拉堆优化(链式前向星存图)
#include 最短路——spfa(链式前向星存图)
SPFA算法由于它上限 O(NM) = O(VE)的时间复杂度,被卡掉的几率很大.在算法竞赛中,我们需要一个更稳定的算法:dijkstra.
spfa算法参考链接
#include | 不必太纠结当下,也不必忧郁未来,当你经历过一些事情后,眼前的风景已经和从前不一样了。人生没有无用的经历,只要我们一直向前走,天总会亮。我想人生的每一段相遇,都会有它的意义,爱你的人带给你温暖,你爱的人带给你欢愉,不爱你的人教会你成长,而你不爱的人教会了你疏离,地球上有809个岛屿 ,204个国家 ,77亿人,相遇的概率只有2920万分之一,我和你相遇,已经是无比的幸运~ |
|---|