第五章 学习OpenCV——图像处理
第五章 学习OpenCV——图像处理
目录
- 第五章 学习OpenCV图像处理
- 目录
- 例5-1 单一阈值与自适应阈值的比较
- 例5-2 使用cvSmooth函数以多种方式平滑图像
- 例5-3 cvErode腐蚀操作与cvDilate膨胀操作效果对比
- 例5-4 在噪声图像中生成一个清晰的图像掩码
- 例5-5 双边滤波操作
- 例5-6 礼帽阈值化和图像金字塔操作
- 例5-7 单一阈值化各方式与自适应阈值化比较
- 目录
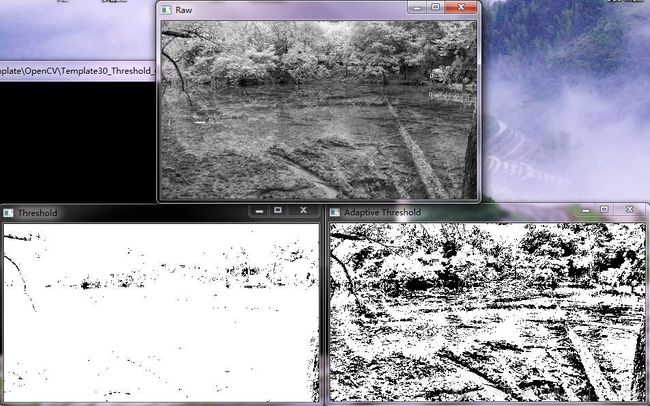
例5-1 单一阈值与自适应阈值的比较
针对有很强照明或反射梯度的图像,需要根据梯度梯度进行阈值化时,cvAdaptiveThreshold()自适应阈值化比cvThreshold()单一阈值化具有更好的效果。具体代码如下:
#include
#include 运行结果如下图:
例5-2 使用cvSmooth()函数以多种方式平滑图像
本例完成的工作如下:
1. 载入一个带有有趣纹理的图像;
2. 使用对称的平滑窗口,大小依次为3×3,5×5,9×9,11×11,并显示结果;
3. 用5×5高斯滤波器平滑图像两次和用两个11×11的平滑器平滑一次输出结果,对比显示;
4. 建立一个100×100的单通道图像,将图像全部像素设置为0,然后设置中心像素值等于255;
5. 利用5×5的高斯滤波器平滑此图像,并显示结果;
6. 利用9×9的高斯滤波器平滑此图像,并显示结果;
6. 重新对原始图像用5×5的高斯滤波器平滑两次,并显示结果;
7. 重新对原始图像用9×9的高斯滤波器平滑两次,并显示结果;
8. 设置param1=param2=9,依次将param3设置为1,4,6,进行高斯平滑,显示结果;
9. 设置param1=param2=0,依次将param3设置为1,4,6,进行高斯平滑,显示结果;
10. 设置param1=param2=0,param3=1,param4=9,进行高斯平滑,显示结果;
11. 设置param1=param2=0,param3=9,param4=1,进行高斯平滑,显示结果;
12. 设置param1=param2=0,param3=1,param4=9,平滑一次;再设置param1=param2=0,param3=9,param4=1,平滑一次,显示结果;
13. 设置param1=param2=0,param3=param4=9,平滑一次;再设置param1=param2=0,param3=param4=1,平滑一次,显示结果;
具体代码如下:
#include
#include 运行结果如下图:

例5-3 cvErode()腐蚀操作与cvDilate()膨胀操作效果对比
本例完成的工作如下:
1. 用摄像机拍摄同一场景的两幅图片,拍摄位置略微不同,载入两幅图像,分别记为src1和src2;
2. 将src1减去src2并求绝对值,将结果记为diff12,并显示结果;
3. 对diff12先进行cvErode()腐蚀操作,然后进行cvDilate()膨胀操作,结果记为cleandiff,并显示结果;
4. 对diff12先进行cvDilate()膨胀操作,然后进行cvErode()腐蚀操作,结果记为dirtydiff,并显示结果;
具体代码如下:
#include
#include 运行结果如下图:

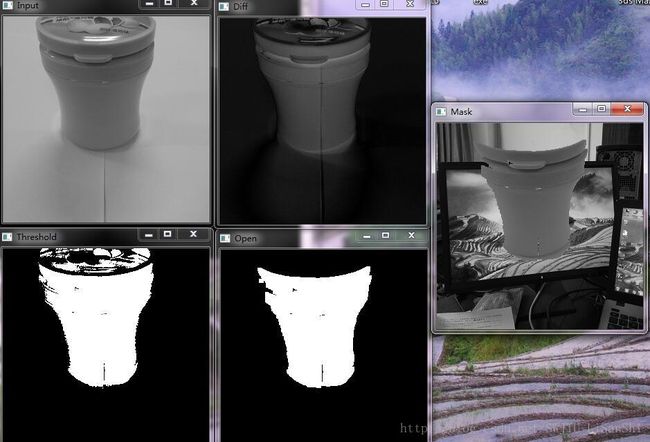
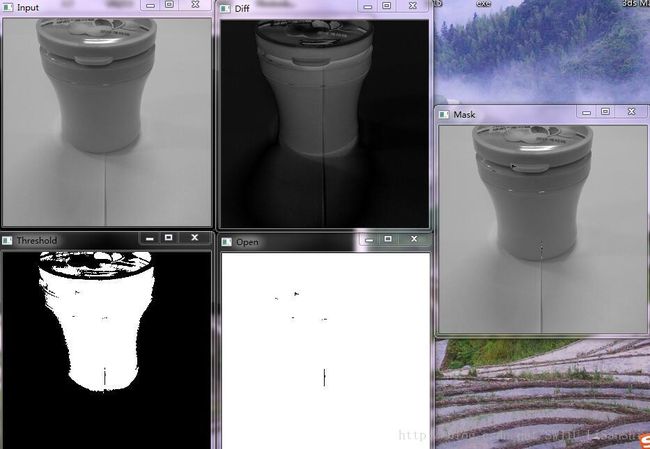
例5-4 在噪声图像中生成一个清晰的图像掩码
本例完成的工作如下:
1. 用摄像机拍摄一张某场景的照片,然后摄像机不动,在此场景中心位置放一个咖啡杯,再拍摄一张照片,将其载入电脑,并转换为8位灰度图像;
2. 取其差的绝对值,并显示结果;
3. 对结果图像进行二值化阈值操作,剔除噪声的同时并保留咖啡杯。超过阈值的像素应该设置为255,并显示结果;
4. 在图像上进行cvMorphologyEx()的开运算CV_MOP_OPEN操作,进一步去除噪声,并显示结果;
5. 保留图像中最大的图形区域,在图像的左上角设置一个指针,然后让它遍历图像,当发现像素值为255时,存储其位置,然后对其进行漫水填充操作,新颜色值为100;
6. 读出漫水填充算法所返回的连续区域,并记录下面积,若图像中有另一个较大的区域,那么用0值对这个相对较小的区域进行颜色填充,然后删除已记录的面积和位置,并记录新区域的面积和位置;
7. 最后以颜色值255填充剩余的最大的区域,并显示结果;
8. 载入一张图像,使用之前步骤生成的掩码,在cvCopy()函数中使用此掩码,将杯子复制到新载入的图像之中。
具体代码如下:
#include
#include
#include
/******************遍历图像,指针算法********************/
bool find_point(IplImage *img, char val,CvPoint* point)
{
char* ptr=NULL;
// uchar* ptr = NULL;
/********** 错,CvMat中为uchar* IplImage中为char* ********/
if (img->nChannels == 1)
{
ptr = img->imageData;
if (ptr != NULL)
{
for (int i = 0; i < img->height; i++) //矩阵指针行寻址
{
ptr = (char*)(img->imageData + i*(img->widthStep)); //i 行 j 列
// ptr = (uchar*)img->imageData + i*img->widthStep; //index1 行 index2 列
/********** 错,mat中为uchar* IplImage中为char* ********/
for (int j = 0; j < img->width; j++) //矩阵指针列寻址
{
//if (ptr[j] == 255) /********错误 ptr对应的值为char型********/
if (ptr[j] == val) //判断某点像素是否为255
{
point->x = j; //列 ****Notice x为列坐标,若为行坐标会出现问题
point->y = i; //行
return true;
}
}
}
}
}
return false;
}
int main(int argc, char* argv[])
{
IplImage *In1, *In2, *In3;
IplImage *diff12, *Ithreshold, *temp, *Iopen; //图像
double threshold = 45; //阈值
int threshold_type = CV_THRESH_BINARY; //阈值类型
CvPoint Last_Point; //值为255点的上一点
CvPoint Current_Point; //值为255点当前点
int Last_Area = 0; //上一个区域面积
int Current_Area = 0; //当前区域面积
CvConnectedComp comp; //被填充区域统计属性
if ((In1 = cvLoadImage("D:\\Template\\OpenCV\\Template33_Threshold\\Debug\\5.jpg", CV_LOAD_IMAGE_GRAYSCALE)) == 0)
return -1;
if ((In2 = cvLoadImage("D:\\Template\\OpenCV\\Template33_Threshold\\Debug\\6.jpg", CV_LOAD_IMAGE_GRAYSCALE)) == 0)
return -2;
if ((In3 = cvLoadImage("D:\\Template\\OpenCV\\Template33_Threshold\\Debug\\7.jpg", CV_LOAD_IMAGE_GRAYSCALE)) == 0)
return -2;
Last_Point = cvPoint(0, 0); //初始化上一点
Current_Point = cvPoint(0, 0); //初始化当前点
diff12 = cvCreateImage(cvGetSize(In1), IPL_DEPTH_8U, 1); //求差绝对值图像
Ithreshold = cvCreateImage(cvGetSize(In1), IPL_DEPTH_8U, 1); //二值阈值化图像
temp = cvCreateImage(cvGetSize(In1), IPL_DEPTH_8U, 1); //临时图像
Iopen = cvCreateImage(cvGetSize(In1), IPL_DEPTH_8U, 1); //开运算图像
cvAbsDiff(In1,In2,diff12); //求差取绝对值
cvThreshold(diff12, Ithreshold, threshold, 255, threshold_type); //二值阈值化
cvMorphologyEx(Ithreshold, Iopen, temp, NULL, CV_MOP_OPEN, 2); //开运算
cvNamedWindow("Open", 1);
do
{
if (find_point(Iopen,255, &Current_Point)) //找像素值为255的像素点
{
cvFloodFill(Iopen, Current_Point, cvScalar(100), cvScalar(0), cvScalar(0),
&comp, 8 | CV_FLOODFILL_FIXED_RANGE); //对值为255的点进行漫水填充,值100
Current_Area = comp.area; //当前区域面积
if (Last_Area//当前区域大于上一区域,上一区域清0
{
if (Last_Area>0)
cvFloodFill(Iopen, Last_Point, cvScalar(0), cvScalar(0), cvScalar(0),
&comp, 8 | CV_FLOODFILL_FIXED_RANGE); //上一区域赋值0
cvShowImage("Open", Iopen);
cvWaitKey(500);
Last_Area = Current_Area; //当前区域赋值给上一区域
Last_Point = Current_Point; //当前点赋值给上一点
//memcpy(&Current_Point, &Last_Point, sizeof(CvPoint)); //错误,此方法复制无法正常使用掩码
}
else //当前区域小于等于上一区域,当前区域清0
{
if (Current_Area>0)
cvFloodFill(Iopen, Current_Point, cvScalar(0), cvScalar(0), cvScalar(0),
&comp, 8 | CV_FLOODFILL_FIXED_RANGE); //当前区域赋值0
cvShowImage("Open", Iopen);
cvWaitKey(500);
}
}
else //最后剩余的最大区域赋值255
{
cvFloodFill(Iopen, Last_Point, cvScalar(255), cvScalar(0), cvScalar(0), &comp, 8 | CV_FLOODFILL_FIXED_RANGE);
cvShowImage("Open", Iopen);
cvWaitKey(500);
break;
}
} while (true);
cvCopy(In1, In3, Iopen); //将指定In1掩码区域复制到In3内
cvNamedWindow("Input", 1);
cvNamedWindow("Diff", 1);
cvNamedWindow("Threshold",1);
cvNamedWindow("Mask", 1);
cvShowImage("Input", In1);
cvShowImage("Diff", diff12);
cvShowImage("Threshold", Ithreshold);
cvShowImage("Open", Iopen);
cvShowImage("Mask", In3);
cvWaitKey(0);
cvReleaseImage(&In1);
cvReleaseImage(&In2);
cvReleaseImage(&In3);
cvReleaseImage(&diff12);
cvReleaseImage(&Ithreshold);
cvReleaseImage(&Iopen);
cvDestroyWindow("Input");
cvDestroyWindow("Diff");
cvDestroyWindow("Threshold");
cvDestroyWindow("Open");
cvDestroyWindow("Mask");
return 0;
} 运行结果如下图:
特别提醒:
笔者在编写此段代码时忽略了一些小细节,导致程序出现了许多意想不到的错误,错误如下:
错误1:ptr图像数据头指针,在CvMat中为uchar*, IplImage中为char*,如果此处将其类型强制转化为unchar*类型,程序能够正常工作,但是这样的做法并不严谨,可能会出现一些意想不到的问题。特别注意:像素点值的判断语句ptr[j] == val,当ptr类型为char*时,val必须为char型的数值,若使用int类型的值,将会出现如下图所示的错误(无法正常进行像素点值的判断):
相关代码如下:
/******************遍历图像,指针算法********************/
bool find_point(IplImage *img, char val,CvPoint* P_point)
{
char* ptr=NULL;
//uchar* ptr = NULL;
/********** 错,CvMat中为uchar* IplImage中为char* ********/
if (img->nChannels == 1)
{
ptr = img->imageData;
//ptr = (uchar*)img->imageData;
/********** 错,CvMat中为uchar* IplImage中为char* ********/
if (ptr != NULL)
{
for (int i = 0; i < img->height; i++) //矩阵指针行寻址
{
ptr = (img->imageData + i*(img->widthStep)); //i 行 j 列
//ptr = (uchar*)img->imageData + i*img->widthStep; //index1 行 index2 列
/********** 错,mat中为uchar* IplImage中为char* ********/
for (int j = 0; j < img->width; j++) //矩阵指针列寻址
{
//if (ptr[j] == 255) /********错误 ptr对应的值为char型********/
if (ptr[j] == val) //判断某点像素是否为255
{
P_point->x = j; //列 ****Notice x为列坐标,若为行坐标会出现问题
P_point->y = i; //行
//point.x = j; /********错误 无法正常实现行列赋值********/
//point.y = i;
return true;
}
}
}
}
}
return false;
}错误2:获取指定像素点的坐标值时,要明确P_point->x为列坐标,P_point->y为行坐标,反了会出现一些意想不到的错误。
尚待解决的问题——point.x赋值结果与P_point->x赋值结果不同
笔者曾尝试使用矩阵中获取坐标值的方式point.x = j;获取行和列的值,但是其运行结果与P_point->x=j;的结果不同(其中,point为CvPoint类型,P_point为CvPoint*类型),程序运行异常,笔者至今未能发现问题所在,希望能够解决的朋友不吝赐教,在此谢过。
例5-5 双边滤波操作
本例完成的工作如下:
1. 使用一个随机变量生成一个较小方差的随机图像,大部分值的差异不超过3,且大部分数值接近0;
2. 将此图像载入一个绘制程序例如PowerPoint,在图像上画一些辐射状相交于一个交点的线条;
3. 对此图像进行双边滤波操作,并显示结果。
具体代码如下:
#include
#include
#include
using namespace std;
int main(int argc, char* argv[])
{
IplImage *In1,*In2,*Out; //图像
char* ptr; //图像数据指针
int smooth_type = CV_THRESH_BINARY; //模糊类型
int val=0; //叠加的值
In1 = cvCreateImage(cvSize(500, 500), IPL_DEPTH_8U, 1); //创建原始图像
Out = cvCreateImage(cvGetSize(In1), IPL_DEPTH_8U, 3); //创建输出图像
cvZero(In1); //清零
for (int i = 0; i < In1->height; i++) //矩阵指针行寻址
{
for (int j = 0; j < In1->width; j++) //矩阵指针列寻址
{
cvSetReal2D(In1, i, j, val); //设置图像元素的值
val++;
if (val == 4) //等于4清零
val = 0;
}
}
/******************打印矩阵********************/
//for (int i = 0; iheight; i++) //矩阵指针行寻址
//{
// for (int j = 0; jwidth; j++) //矩阵指针列寻址
// {
// double text = cvGetReal2D(In1, i, j); //获取i行j列元素值
// cout << text << " "; //空格
// }
// cout << endl; //换行
//}
cvNamedWindow("In1", 1);
cvNamedWindow("In2", 1);
cvNamedWindow("Out", 1);
cvShowImage("In1", In1);
cvSaveImage("D:\\Template\\OpenCV\\Template34_Bilate_Ral\\Debug\\0.jpg", In1);
In2=cvLoadImage("D:\\Template\\OpenCV\\Template34_Bilate_Ral\\Debug\\8.jpg");
cvShowImage("In2", In2);
cvSmooth(In2,Out,smooth_type,10,5);
cvShowImage("Out", Out);
cvWaitKey(0);
cvReleaseImage(&In1);
cvDestroyWindow("In1");
cvDestroyWindow("In2");
cvDestroyWindow("Out");
return 0;
}
运行结果如下图:

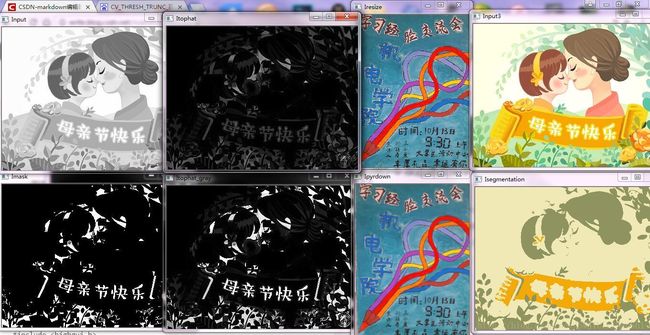
例5-6 礼帽、阈值化和图像金字塔操作
本例完成的工作如下:
1. 读入一张风景图,将其转化为灰度图像;
2. 对此图像进行形态学“礼帽”操作,并显示其结果;
3. 将结果图像转化为8位的掩码(二值阈值化);
4. 复制灰度图像的灰度值到礼帽块中,并显示结果;
5. 利用cvResize()函数缩小图像,每个维度上缩小比例为2,因此整张图片缩小比例为4,重复三次,并显示结果;
6. 利用cvPyrdown()函数在原图像上进行三次降采样操作,并显示结果;
7. 对一幅风景图执行金字塔图像分割cvPyrSegmentation()操作。
具体代码如下:
#include
#include 运行结果如下图:
例5-7 单一阈值化各方式与自适应阈值化比较
本例完成的工作如下:
1. 载入一幅场景丰富的图像,使用cvThreshold()函数对其进行单一阈值化操作,设置阈值为128,使用二值阈值化(CV_THRESH_BINARY)、反向二值阈值化(CV_THRESH_BINARY_INV)、截断阈值化(CV_THRESH_TRUNC)、超过阈值归零(CV_THRESH_TOZERO_INV)、低于阈值归零(CV_THRESH_TOZERO)对图像进行操作,并显示结果;
2. 使用函数cvAdaptiveThreshold()进行自适应阈值化操作,分别设置param1=5、param1=0、param1=-5,并显示结果。
具体代码如下:
#include
#include 运行结果如下图:
