boost库asio源码分析之io_service
前言
任务队列的的调度的使用

正文
一, boost库asio io_service 的介绍
io_servie是接口类,为实现跨平台,采用了策略模式,所有接口均有impl_type实现。根据平台不同impl_type分为
win_iocp_io_service Win版本的实现,这里主要分析Linux版本。
task_io_service 非win平台下的实现,其代码结构为:
detail/task_io_service_fwd.hpp 简单声明task_io_service名称
detail/task_io_service.hpp 声明task_io_service的方法和属性
detail/impl/task_io_service.ipp 具体实现文件
队列中的任务类型为opertioan,原型其实是typedef task_io_service_operation operation,其实现文件在detail/task_io_service_operation.hpp中,当队列中的任务被执行时,就是task_io_service_operation:complete被调用的时候。
任务队列在上面一篇文章已经介绍过来 是 使用设计模式中 模板方法模式
下面是task_io_service类的图

二, task_io_service::run方法
实际调用do_run_one函数
1, 优先处理队列中的任务
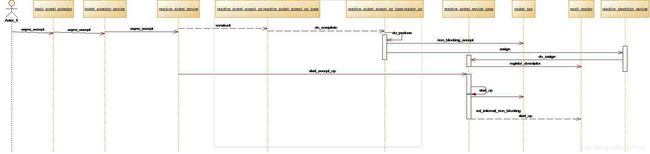
回调task_io_service_operation::complete函数处理 队列任务
类的关系图
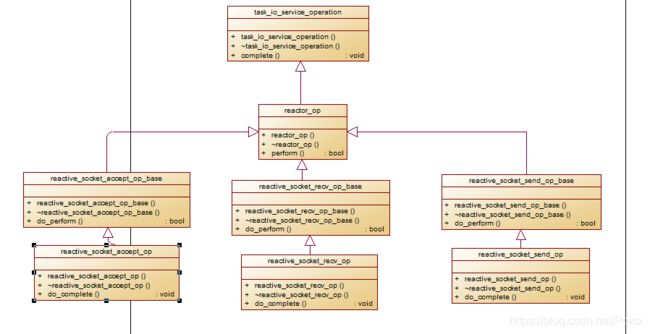
2, 没有任务时
没有任务实际时阻塞 _task->run方法中 task_变量类型为reactor,在linux平台实现为epoll_reactor,实现代码文件为detail/impl/epoll_reactor.ipp,run方法实际上执行的是epoll_wait,run阻塞在epoll_wait上等待事件到来,并且处理完事件后将需要回调的函数push到io_servie的任务队列中,虽然epoll_wait是阻塞的,但是它提供了interrupt函数,该interrupt是如何实现的呢,它向epoll_wait添加一个文件描述符,该文件描述符中有8个字节可读,这个文件描述符是专用于中断epoll_wait的,他被封装到select_interrupter中,select_interrupter实际上实现是eventfd_select_interrupter,在构造的时候通过pipe系统调用创建两个文件描述符,然后预先通过write_fd写8个字节,这8个字节一直保留。在添加到epoll_wait中采用EPOLLET水平触发,这样,只要select_interrupter的读文件描述符添加到epoll_wait中,立即中断epoll_wait。很是巧妙。
3, Run方法的原则是
- 有任务立即执行任务,尽量使所有的线程一起执行任务
- 若没有任务,阻塞在epoll_wait上等待io事件
- 若有新任务到来,并且没有空闲线程,那么先中断epoll_wait,先执行任务
- 若队列中有任务,并且也需要epoll_wait监听事件,那么非阻塞调用epoll_wait(timeout字段设置为0),待任务执行完毕在阻塞在epoll_wait上。
- 几乎对线程的使用上达到了极致。
- 从这个函数中可以知道,在使用ASIO时,io_servie应该一个,这样可以使其epoll_wait占用的时间片最多,这样可以最大限度的响应IO事件,降低响应时延。但是每个task_io_servie::run占用一个线程,所以task_io_servie启动run方法最佳应该和CPU的核数相同。
三, boost中计时器
简单使用案例:
#include
#include
#include
#include
void time_callback(const boost::system::error_code &ec,
boost::asio::deadline_timer* pt,
int * pcount)
{
//if (*pcount < 3)
{
std::cout << "count = " << *pcount << std::endl;
std::cout << boost::this_thread::get_id() << std::endl;
(*pcount)++;
pt->expires_at(pt->expires_at() + boost::posix_time::seconds(5));
pt->async_wait(boost::bind(time_callback, boost::asio::placeholders::error, pt, pcount));
}
}
int main(int argc, char *argv[])
{
std::cout << boost::this_thread::get_id() << std::endl;
boost::asio::io_service io;
boost::asio::deadline_timer t(io, boost::posix_time::seconds(5));
int count = 0;
t.async_wait(boost::bind(time_callback, boost::asio::placeholders::error, &t, &count));
std::cout << "to run" << std::endl;
io.run();
std::cout << "Final count is " << count << "\n";
std::cout << "exit" << std::endl;
return 0;
}
basic_deadline_timer 模板继承于 deadline_timer_service模板
template ,
typename TimerService = deadline_timer_service >
class basic_deadline_timer
: public basic_io_object
deadline_timer_service.hpp 服务管理scheduler_就是epoll_reactor
在timer_scheduler_fwd.hpp区别平台
#if defined(BOOST_ASIO_WINDOWS_RUNTIME)
typedef class winrt_timer_scheduler timer_scheduler;
#elif defined(BOOST_ASIO_HAS_IOCP)
typedef class win_iocp_io_service timer_scheduler;
#elif defined(BOOST_ASIO_HAS_EPOLL)
typedef class epoll_reactor timer_scheduler;
#elif defined(BOOST_ASIO_HAS_KQUEUE)
typedef class kqueue_reactor timer_scheduler;
#elif defined(BOOST_ASIO_HAS_DEV_POLL)
typedef class dev_poll_reactor timer_scheduler;
#else
typedef class select_reactor timer_scheduler;
#endif
在构造函数中 添加epoll监听
// Constructor.
deadline_timer_service(boost::asio::io_service& io_service)
: scheduler_(boost::asio::use_service(io_service))
{
scheduler_.init_task();
scheduler_.add_timer_queue(timer_queue_); // add timer queue
}
在async_wait中添加回调函数
// Start an asynchronous wait on the timer.
template
void async_wait(implementation_type& impl, Handler& handler)
{
// Allocate and construct an operation to wrap the handler.
typedef wait_handler op;
typename op::ptr p = { boost::asio::detail::addressof(handler),
boost_asio_handler_alloc_helpers::allocate(
sizeof(op), handler), 0 };
p.p = new (p.v) op(handler);
impl.might_have_pending_waits = true;
BOOST_ASIO_HANDLER_CREATION((p.p, "deadline_timer", &impl, "async_wait"));
scheduler_.schedule_timer(timer_queue_, impl.expiry, impl.timer_data, p.p);// add epoll
p.v = p.p = 0;
}
使用boost库中计时器需要注意的要使用新的io_service服务 和io的分开
四, 多线程
在io_service构造函数中
io_service::io_service()
: service_registry_(new boost::asio::detail::service_registry( *this, static_cast(0), (std::numeric_limits::max)())) // new task_io_service
, impl_(service_registry_->first_service())
{
}
io_service::io_service(std::size_t concurrency_hint)// task_io_service -> _one_therad control
: service_registry_(new boost::asio::detail::service_registry(
*this, static_cast(0), concurrency_hint)),
impl_(service_registry_->first_service())
{
}
在task_io_service任务队列的构造函数 默认 是多线程
// Constructor. Specifies the number of concurrent threads that are likely to
// run the io_service. If set to 1 certain optimisation are performed.
BOOST_ASIO_DECL task_io_service(boost::asio::io_service& io_service,
std::size_t concurrency_hint = 0);
在task_io_service实现中
task_io_service::task_io_service(
boost::asio::io_service& io_service, std::size_t concurrency_hint)
: boost::asio::io_service& io_service, std::size_t concurrency_hint)
: boost::asio::detail::service_base(io_service),
one_thread_(concurrency_hint == 1), // 默认是多线程的
mutex_(),
task_(0),
task_interrupted_(true),
outstanding_work_(0),
stopped_(false),
shutdown_(false)
{
BOOST_ASIO_HANDLER_TRACKING_INIT;
}
在任务队列中 task_io_service的run方法
std::size_t task_io_service::do_run_one(mutex::scoped_lock& lock, task_io_service::thread_info& this_thread, const boost::system::error_code& ec)
{
while (!stopped_)
{
if (!op_queue_.empty())
{
// Prepare to execute first handler from queue.
operation* o = op_queue_.front();
op_queue_.pop();
bool more_handlers = (!op_queue_.empty());
if (o == &task_operation_) //
{
task_interrupted_ = more_handlers;
printf("[%s][%d] \n", __PRETTY_FUNCTION__, __LINE__);
if (more_handlers && !one_thread_)//当没有任务时工作线程就不需要加锁了
wakeup_event_.unlock_and_signal_one(lock);
else
lock.unlock();
task_cleanup on_exit = { this, &lock, &this_thread };
(void)on_exit;
// Run the task. May throw an exception. Only block if the operation
// queue is empty and we're not polling, otherwise we want to return
// as soon as possible.
task_->run(!more_handlers, this_thread.private_op_queue);
printf("[%s][%d] \n", __PRETTY_FUNCTION__, __LINE__);
}
else
{
std::size_t task_result = o->task_result_;
if (more_handlers && !one_thread_) // 唤醒work线程起来工作了
{
wake_one_thread_and_unlock(lock);
}
else
{
lock.unlock();
}
// Ensure the count of outstanding work is decremented on block exit.
work_cleanup on_exit = { this, &lock, &this_thread };
(void)on_exit;
printf("[%s][%d] \n", __PRETTY_FUNCTION__, __LINE__);
// Complete the operation. May throw an exception. Deletes the object.
o->complete(*this, ec, task_result); // -- call_back --> reactive_socket_accept_op function -> do_commplete方法
return 1;
}
}
else
{
wakeup_event_.clear(lock);
wakeup_event_.wait(lock);
}
}
return 0;
}
上面使用多线程 io_service必须是一个 ,
看上面的task_io_service中run方法 是否是如果有多个新socket的文件描述符变化就会唤醒工作线程,当然工作线程是需要你根据服务器cpu判断适合开启几个线程,
这个相当于我们在上学的时候在学校食堂打饭, 如果只有一个窗口排队的人会非常多, 现在学校要调整这个窗口个数, 怎么调整呢,就是不管有没有人都开启学校最大能开启窗口, 比如现在是20个窗口, 一起工作是否就会非常的快啊。 这就是boost库和libevent库使用共同的特点,不同之处就是libevent是基于事件通知其他的的线程,boost是通过信号通知的
我们启动多线程时应该是这样启动
for(int32 i = 0; i < thread_num; ++i)
{
m_thread.push_back(std::thread(m_io_service.run()));
}
结语
个人博客地址:https://chensongpoixs.github.io/