opencv-python:10_OpenCV颜色空间转换(cv2.cvtColor()、cv2.inRange()、获取图像中指定颜色区域、调用摄像头进行物体跟踪)
颜色空间转换
- 学习如何对图像进行颜色空间转换,比如从 BGR 到灰度图,或者BGR 到 HSV 等。
- 创建一个程序用来从一幅图像中获取某个特定颜色的物体。
- 相关函数有:cv2.cvtColor(),cv2.inRange()。
一、转换颜色空间
-
在 OpenCV 中有超过 150 中进行颜色空间转换的方法。但是你以后就会发现我们经常用到的也就两种:BGR↔Gray 和 BGR↔HSV。
-
我们要用到的函数是:cv2.cvtColor(input_image,flag),其中 flag就是转换类型。
- BGR↔Gray flag 就是 cv2.COLOR_BGR2GRAY
- BGR↔HSV flag 就是 cv2.COLOR_BGR2HSV。
-
注意:在 OpenCV 的 HSV 格式中,H(色彩/色度)的取值范围是 [0,179],S(饱和度)的取值范围 [0,255],V(亮度)的取值范围 [0,255]。但是不同的软件使用的值可能不同。所以当你需要拿 OpenCV 的 HSV 值与其他软件的 HSV 值进行对比时,一定要记得归一化。
import cv2
import numpy as np
img = cv2.imread("cat.jpg")
gray = cv2.cvtColor(img,cv2.COLOR_BGR2GRAY)
cv2.namedWindow('image', cv2.WINDOW_NORMAL)
cv2.imshow('image',gray)
cv2.waitKey(0)
cv2.destroyAllWindows()
二、获取图像中指定颜色区域
参考链接:https://blog.csdn.net/qq_40456669/article/details/93375709
方法
- 将图片的色彩空间转为HSV色彩空间
- 通过比照HSV的参考表,进行获取要提取颜色的相应范围
- 使用inRange函数进行提取
- 使用imShow显示
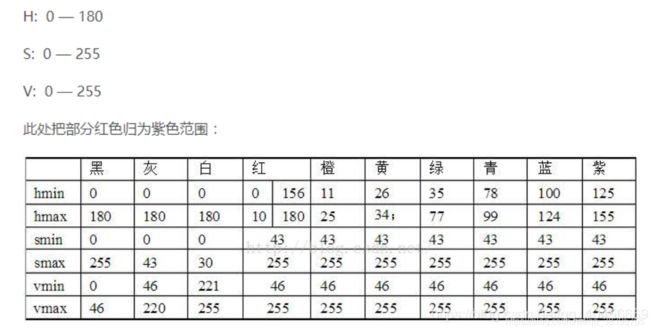
这个例子为提取红色部分。通过观察下表,可以看到红色的hmin,smin,vmin分别为0,43,46;hmax,smax,vmax分别为10,255,255.
import cv2
import numpy as np
import matplotlib.pyplot as plt
img = cv2.imread("opencv.jpg")
hsv = cv2.cvtColor(img, cv2.COLOR_BGR2HSV)
# 设置阈值
# 提取红色区域
l_blue = np.array([0,43,46])
h_blue = np.array([10,255,255])
#构建掩模
mask = cv2.inRange(hsv,lowerb=low_hsv,upperb=high_hsv)
#进行位运算
res = cv2.bitwise_and(img, img, mask = mask)
#用matplotlib绘制需要BGR转为RGB
b,g,r=cv2.split(img)
img2=cv2.merge((r,g,b))
b,g,r=cv2.split(res)
res=cv2.merge((r,g,b))
# 显示图片
plt.figure(figsize = (25, 20))
plt.subplot(1, 4, 1), plt.imshow(img2, cmap = 'gray')
plt.subplot(1, 4, 2), plt.imshow(hsv, cmap = 'gray')
plt.subplot(1, 4, 3), plt.imshow(mask, cmap = 'gray')
plt.subplot(1, 4, 4), plt.imshow(res, cmap = 'gray')

cv2.bitwise_and() 函数
-
cv2.bitwise_and()是对二进制数据进行“与”操作,即对图像(灰度图像或彩色图像均可)每个像素值进行二进制“与”操作,1&1=1,1&0=0,0&1=0,0&0=0
-
利用掩膜(mask)进行“与”操作,即掩膜图像白色区域是对需要处理图像像素的保留,黑色区域是对需要处理图像像素的剔除,其余按位操作原理类似只是效果不同而已。
三、物体跟踪
现在我们知道怎样将一幅图像从 BGR 转换到 HSV 了,我们可以利用这一点来提取带有某个特定颜色的物体。在 HSV 颜色空间中要比在 BGR 空间中更容易表示一个特定颜色。在我们的程序中,我们要提取的是一个蓝色的物体。下面就是就是我们要做的几步:
从视频中获取每一帧图像
将图像转换到 HSV 空间
设置 HSV 阈值到蓝色范围。
获取蓝色物体,当然我们还可以做其他任何我们想做的事,比如:在蓝色物体周围画一个圈。
import cv2
import numpy as np
cap=cv2.VideoCapture(0)
while(1):
# 获取每一帧
ret,frame=cap.read()
# 转换到 HSV
hsv=cv2.cvtColor(frame,cv2.COLOR_BGR2HSV)
# 设定蓝色的阈值
lower_blue=np.array([110,50,50])
upper_blue=np.array([130,255,255])
# 根据阈值构建掩模
mask=cv2.inRange(hsv,lower_blue,upper_blue)
# 对原图像和掩模进行位运算
res=cv2.bitwise_and(frame,frame,mask=mask)
# 显示图像
cv2.imshow('frame',frame)
cv2.imshow('mask',mask)
cv2.imshow('res',res)
if cv2.waitKey(5) & 0xFF == 27:
break
# 关闭窗口
cap.release()
cv2.destroyAllWindows()