ubuntu14.04+windows双系统安装Ros indigo 与pioneer (测试的是3at和3dx) 键盘控制
1.安装Linux系统,通过软件UltraISO
下载软件,打开文件,找到linux.iso文件,配置硬盘,写入
安装方式(WIn10+Linux论坛找的,win7直接分出50G,插u盘装就可以,如果安装了固态,两个系统须装在同一盘中(固态、机械盘选一个,一般固态),装在不同盘,启动时需要很多操作)
Ubuntu是很多Linux初学者最理想的选择,如果你恰好对Windows系列审美疲劳或者累觉不爱,那就要听好,有三种方法助你走进Ubuntu新世界。
-
虚拟机安装
原料:Ubuntu Kylin的ISO、VMware或VirtualBox优点:一条龙服务,安全简单缺点:用户体验差,隔靴搔痒 -
Wubi安装
原料:Ubuntu Kylin的ISO、wubi.exe优点:即点即用,默认Windows开机引导缺点:易死机,待机和网络易出问题 -
U盘安装
原料:Ubuntu Kylin的ISO、UltraISO、EasyBCD、U盘(>=2G)优点:简单安全,正牌双系统缺点:默认Ubuntu开机引导
安装环境
本人的原则是,既然玩就玩最正宗的,so我选择U盘镜像双系统。

系统属性
游戏开始
下面正式开始安装,step by step。
-
数据备份
先别着急,你备份了吗?如果你看到这里,说明你选择了风险最大的一条路,在游戏开始之前,一定要做好数据备份,数据备份,数据备份。 -
创建磁盘分区
- 按住Win + X,选择“磁盘管理”:
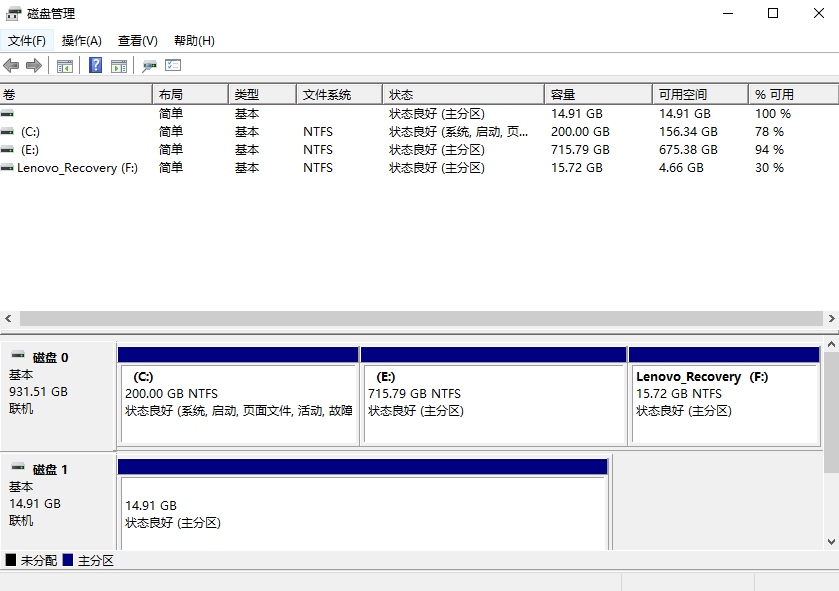
磁盘管理概览
- 选择剩余空间较大的可分配磁盘,右键并选择“压缩卷”,这里选择压缩E盘50G左右的空间:
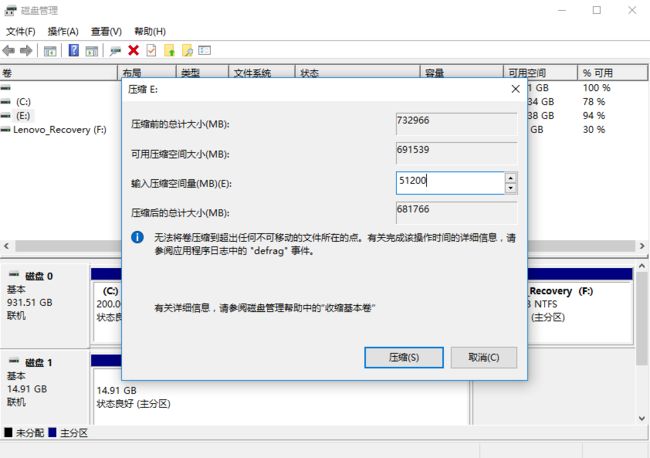
压缩卷
- 点击“压缩”之后,E盘后部出现黑色的50G“未分配空间”:
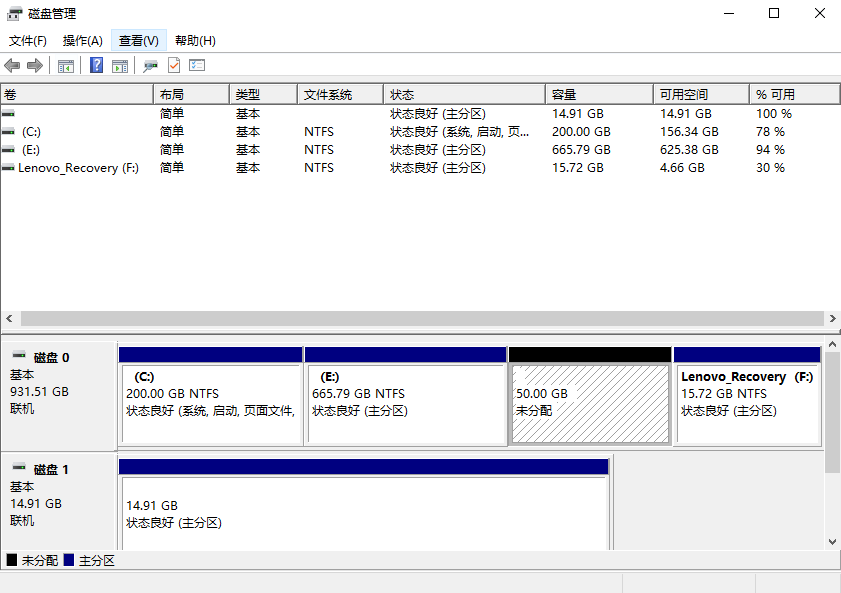
50G未分配空间
至此,磁盘分区过程完成。
- 按住Win + X,选择“磁盘管理”:
-
禁用快速启动(可选)
- 按住Win + X(请记住这个万能的组合),选择“电源选项”,依次执行:

"选择电源按钮的功能"
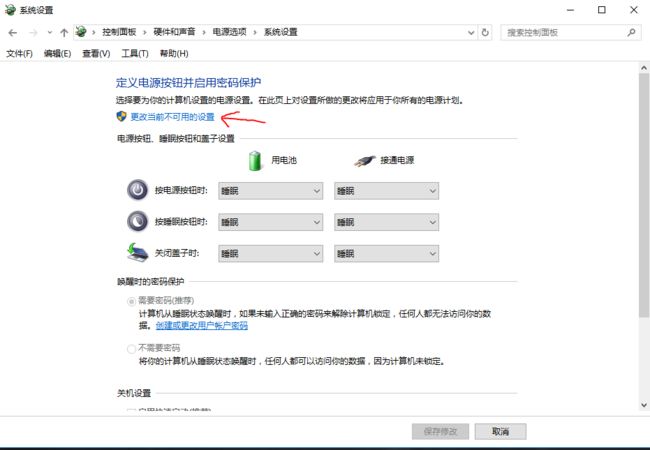
"更改当前不可用的设置"

取消选择"启用快速启动(推荐)"
- 按住Win + X(请记住这个万能的组合),选择“电源选项”,依次执行:
-
注: “快速启动”是Windows 8时代引进的新特性,建议关闭该特性的原因是,“快速启动”会影响Grub开机引导过程,可能出现无法载入Ubuntu的状况,最后选择“保存修改”。
-
禁用安全启动(Secure Boot)
- 进入系统“设置”,依次执行:

更新和安全

恢复>高级启动>立即重启
疑难解答
高级选项
启动设置
执行重启(并不是什么都不做)。启动设置
大部分机器默认是关闭Secure Boot的,如果不放心,直接重启进Boot,简单粗暴:Boot>Security>Secure Boot
确保Secure Boot是Disabled
- 进入系统“设置”,依次执行:
-
注:同样的,“安全启动”也是Windows 8时代为了防范RootKit病毒所采取的安全措施,但也阻止了Windows和其他操作系统的双启动,因此在载入Ubuntu镜像之前,务必确保“安全启动”已禁用。
-
制作Ubuntu的启动U盘
(用U盘安装过操作系统的童鞋可以跳过这一步)- 备份待写入的U盘
- 进入UltraISO,打开文件:

打开镜像文件
- 启动>写入硬盘映像:
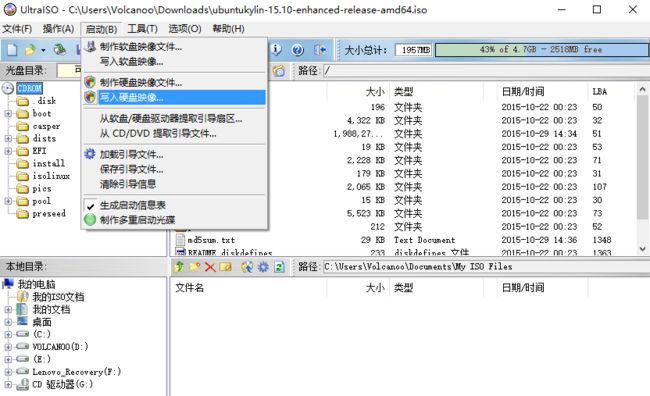
写入硬盘映像
- 按默认值写入:
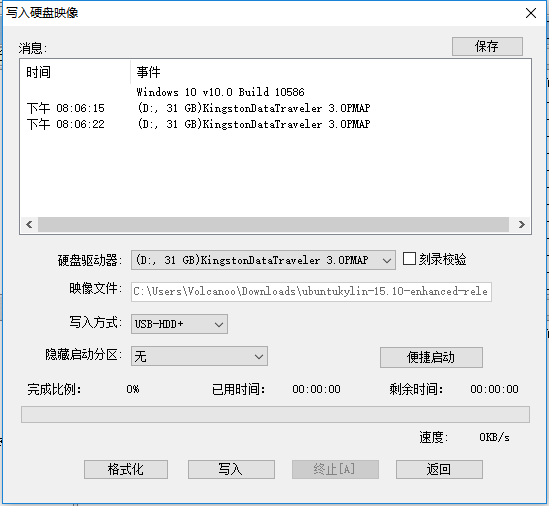
写入硬盘映像
- 完成写入:
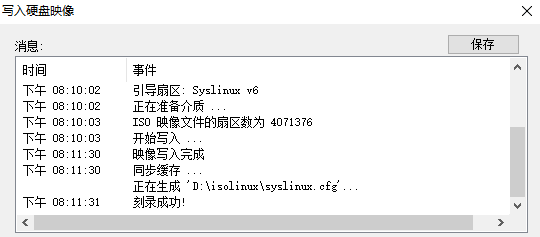
完成硬盘映像写入
-
U盘安装Ubuntu
万事俱备,跟往常重装系统一样,插上U盘,根据机器找到进入Boot的快捷键(我的是F1),下面step by step详解。- 找到镜像U盘,调整Priority Order,Save and Exit:
Boot Priority Order
- 找到镜像U盘,调整Priority Order,Save and Exit:
炫酷的起始画面
注:下次restart记得重置,否则无限循环。
- 选择“安装Ubuntu Kylin”:
欢迎页
- 完成默认设置:
准备事项
- 选择“安装Ubuntu Kylin”:
-
注:如果网络和空间匀速,建议选择“安装中下载更新”和“安装这个第三方软件”。
- 非常重要的一步,选择“其他选项”:
安装类型选择
- 为空闲磁盘分区:
在这一步会看到我们之前分配的未使用磁盘空间,我们即将为这块空闲磁盘分区,为了更方便理解接下来的操作,这里简单介绍一下安装过程所涉及到的几个主要的Linux分区:/:存储系统文件,建议10GB ~ 15GB;swap:交换分区,即Linux系统的虚拟内存,建议是物理内存的2倍;/home:home目录,存放音乐、图片及下载等文件的空间,建议最后分配所有剩下的空间;/boot:包含系统内核和系统启动所需的文件,实现双系统的关键所在,建议200M。 创建/home分区
最后将所有剩余空间分配给/home分区,选择“逻辑分区”(主分区已满)、“空间起始位置”、“Ext4”和“挂载点/home”:
创建/boot分区
接着分配200M空间给/boot分区,选择“逻辑分区”(主分区已满)、“空间起始位置”、“Ext4”和“挂载点/boot”:
创建交换分区
注:实际上,一块硬盘最多容纳4个主分区,或3个主分区外加1个扩展分区,在选择分区类型时,可能会出现“安装系统时空闲分区不可用”状况,为了解决问题,下面一律选择“逻辑分区”。
重复创建步骤,分配16G空间给swap分区,选择“逻辑分区”(主分区已满)、“空间起始位置”、用于“交换空间”:创建/分区
选定空闲磁盘,点击+,首先分配16G空间给/分区,选择“主分区”、“空间起始位置”、Ext4和“挂载点/”:选择空闲磁盘
- 非常重要的一步,选择“其他选项”:
-
确保引导设备编号和/boot一致
选择/boot对应的盘符作为“安装启动引导器的设备”,务必保证一致:
- 最后的设置:
地理位置
键盘布局
用户信息
欢迎界面
大功告成
- 最后的设置:
-
重启系统,进入Windows完成最后的引导设置。
-
EasyBCD引导Ubuntu
进入EasyBCD,选择“添加新条目”,选择Linux/BSD操作系统,在“驱动器”栏目选择接近200M的Linux分区: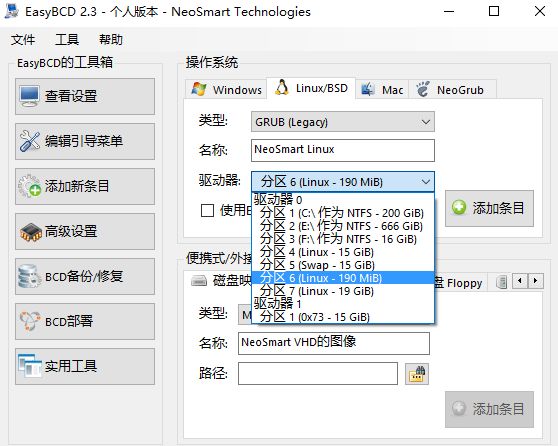
EasyBCD设置
完成条目添加后,重启电脑,会发现Windows10和Ubuntu的双系统已经完成安装,祝玩得开心!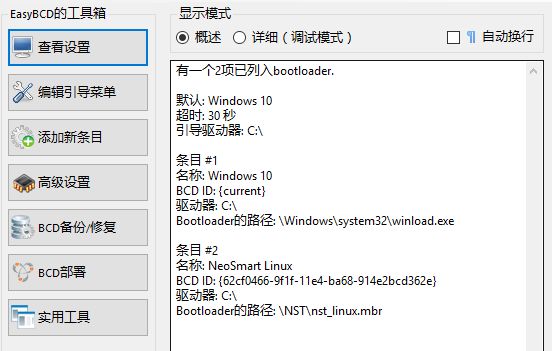
添加之后的条目
Windows引导的开机画面
Ubuntu Kylin桌面
最后
用Windows引导Ubuntu最大的好处就是,当不再需要Ubuntu的时候,直接在Windows磁盘管理中将其所在所有分区删除,然后将EasyBCD中对应条目删除即可。关于Ubuntu引导Windows的方法
2.安装ROS indigo
(1)添加sources.list
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
(2)添加keys
sudo apt-key adv --keyserver hkp://pool.sks-keyservers.net --recv-key 0xB01FA116
(3)安装
sudo apt-get update
sudo apt-get upgrade(很重要,不然ros会错误)
桌面完整版
sudo apt-get install ros-indigo-desktop-full
(4)初始化
sudo rosdep init
rosdep update
(
ERROR : error loading sources list :('The read operation timed out',)
ubuntu 14.04 在配置ros时,运行rosdep update报的错 ,换成手机热点
)
(5)环境设置
echo "source /opt/ros/indigo/setup.bash" >> ~/.bashrc
source ~/.bashrc
(6)安装rosinstall
sudo apt-get install python-rosinstall
3.创建工作空间
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws/src
catkin_init_workspace
cd ~/catkin_ws
catkin_make
source devel/setup.bash
sudo gedit .bashrc
解析: 将对应的工作空间的路径加入环境变量ROS_PACKAGE_PATH中。 如果新开了一个终端命令行,在使用该工作空间前,必须先将该工作空间的路径加入环境变量ROS_PACKAGE_PATH中。
(删linux系统
步骤一:
先不要删除linux!首先解决linux的grub引导问题,后来安装了linux,grub直接覆盖了windows的引导,所以每次开机都是进入了linux的grub引导,也是很不方便,毕竟平时还是用windows比较多的。我们需要重新设置windo引导。
下载:http://pan.baidu.com/s/1jI8DdNw 密码:9qco
里面分别有MbrFix.exe,MbrFix64.exe文件,如果是64位的系统就吧64的文件放在C盘根目录下。然后打开命令提示符(可从“开 始”->“运行”处输入“cmd”->“确定”打开),依次输入以下两条命令:
1.先进入C盘根目录下:
cd C: 或者已经在C盘的子目录了就推到根目录 cd ../..
2.MBR重建,输入:
MbrFix64 /drive 0 fixmbr /yes
1
这样就吧grub引导覆盖了,开机可以直接运行windows。
二:删除linux的系统,在我的电脑,右键选择管理,选择磁盘管理,可以看到没有名字的磁盘分区(linux)。
右键选好的分区,然后选择“删除卷”,这将会把分区删除成自由空间,如果你再选择自由空间,选择删除卷,就会变成未分配空间。在Windows分区上右键,选择“扩展卷”,扩展它以填补删除Linux所留下的自由空间。
这样就完全删除了双系统中的linux而且不会陷入windows引导失败的错误。
4.将先锋机器人程序放到src文件夹下
cd ~/catkin_ws/src
与先锋机器人通过节点进行通讯
git clone https://github.com/amor-ros-pkg/rosaria.git
通过键盘控制机器人
git clone https://github.com/pengtang/rosaria_client
在src中出现两个包rosaria和rosaria_client
5.安装aria
rosdep update
rosdep install rosaria(打开新终端)
cd ~/catkin_ws
catkin_make
source devel/setup.bash
6.RS232配置
插上usb口,打开机器人电源
终端中输入 sudo chmod a+rw /dev/ttyUSB0
7.连接成功后,进行程序运行
roscore
rosrun rosaria RosAria
rosrun rosaria_client interface(按4可用方向键控制先锋机器人运动)
参考:http://blog.csdn.net/David_Han008/article/details/53966532
https://wenku.baidu.com/view/0b4285430b4e767f5acfce60.html