ROS笔记九(基于Python、Kinetic):gazebo中通过键盘输入控制turtlebot机器人移动和转向
前言:
Twist消息能描述所有的3D运动,在控制差分驱动的平面运动机器人时,只需要使用其中的两个参数:线性速度(前进/后退)和绕竖直轴的角速度。所以只需要简单地发送线速度(米每秒)和角速度(弧度每秒)命令。这里需要两个程序:一个程序用来监听键盘地敲击事件然后通过ROS消息发布出去,另一个订阅这个ROS消息并输出一个Twist消息,从而实现键盘输入控制机器人地自由移动。
1.键盘驱动:
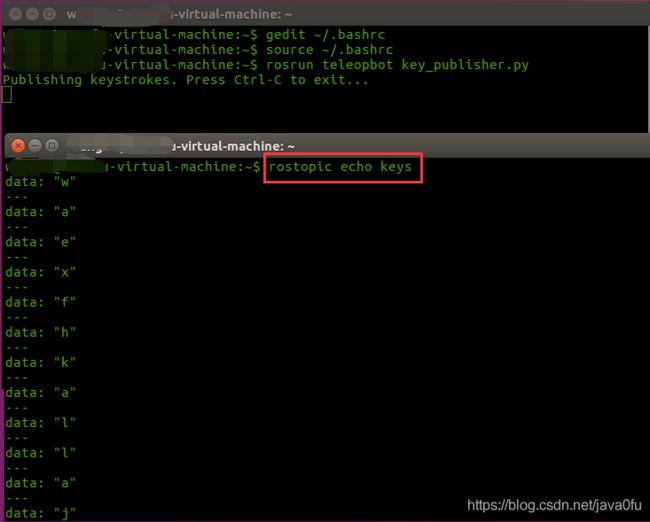
使用Python的termios和tty库将终端设置成原始模式并捕获键盘敲击事件,然后将事件以std_msgs/string的消息形式发布。
#!/usr/bin/env python
import sys, select, tty, termios
import rospy
from std_msgs.msg import String
if __name__ == '__main__':
#发布一个‘keys’消息,消息类型String,缓冲为1
key_pub = rospy.Publisher('keys', String, queue_size=1)
#节点初始化
rospy.init_node("keyboard_driver")
#设置频率
rate = rospy.Rate(100)
#获取键盘敲击,修改终端属性
old_attr = termios.tcgetattr(sys.stdin)
tty.setcbreak(sys.stdin.fileno())
print "Publishing keystrokes. Press Ctrl-C to exit..."
while not rospy.is_shutdown():
if select.select([sys.stdin], [], [], 0)[0] == [sys.stdin]:
#发布消息
key_pub.publish(sys.stdin.read(1))
rate.sleep()
#将终端还原为标准模式
termios.tcsetattr(sys.stdin, termios.TCSADRAIN, old_attr)
运行效果:
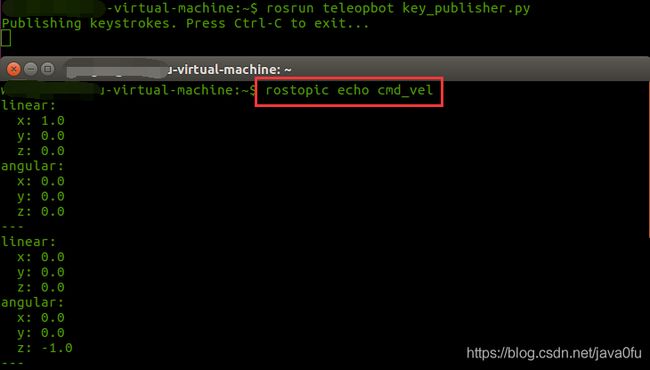
2.运动生成器:
使用w、x、a、d和s是机器人前进、后退、左转、右转和停止。
#!/usr/bin/env python
import rospy
from std_msgs.msg import String
from geometry_msgs.msg import Twist
#使用字典类型存储字母和速度命令的键值映射关系
key_mapping = { 'w': [ 0, 1], 'x': [0, -1],
'a': [-1, 0], 'd': [1, 0],
's': [ 0, 0] }
def keys_cb(msg, twist_pub):
#判断输入是否是有效指令
if len(msg.data) == 0 or not key_mapping.has_key(msg.data[0]):
return
#根据键名取出键值
vels = key_mapping[msg.data[0]]
#赋值Twist消息中的线速度和角速度
t = Twist()
t.angular.z = vels[0]
t.linear.x = vels[1]
#发出Twist消息
twist_pub.publish(t)
if __name__ == '__main__':
#节点初始化
rospy.init_node('keys_to_twist')
#声明‘cmd_vel’话题,消息类型为Twist,缓冲为1
twist_pub = rospy.Publisher('cmd_vel', Twist, queue_size=1)
#订阅‘keys’键盘输入消息,消息类型为String
rospy.Subscriber('keys', String, keys_cb, twist_pub)
rospy.spin()运行效果:
3.代码整合:
将键盘驱动和运动指令生成器整合:
- 实现速度命令消息流的频率稳定,
- 添加ROS的参数系统来决定线速度和角速度(满足不同速度需求的机器人)
- 限制瞬时加速度(瞬间的启动和停止可能会造成打滑,机器人由于驱动电流重复性过载而震颤,甚至机械传动机构断裂)
#!/usr/bin/env python
import rospy
import math
from std_msgs.msg import String
from geometry_msgs.msg import Twist
#使用字典类型存储字母和速度命令的键值映射关系,默认线速度1m/s,默认角速度1rad/s。
key_mapping = { 'w': [ 0, 1], 'x': [ 0, -1],
'a': [ 1, 0], 'd': [-1, 0],
's': [ 0, 0] }
g_twist_pub = None
g_target_twist = None
g_last_twist = None
g_last_send_time = None
#接受用户指定的速度范围,默认0.1,低速运行
g_vel_scales = [0.1, 0.1]
#接受用户指定的线加速度、角加速度(默认值为1)
g_vel_ramps = [1, 1]
#限制速度函数
def ramped_vel(v_prev, v_target, t_prev, t_now, ramp_rate):
#声明加速度
step = ramp_rate * (t_now - t_prev).to_sec()
#判断加速/减速
sign = 1.0 if (v_target > v_prev) else -1.0
#速度变量(目标速度—当前速度)
error = math.fabs(v_target - v_prev)
#速度变量小于加速度
if error < step:
#直接返回目标速度
return v_target
else:
#否则增加或减少一个单位的加速度
return v_prev + sign * step
#速度参数化
def ramped_twist(prev, target, t_prev, t_now, ramps):
#消息声明
tw = Twist()
#根据角加速度修改角速度值
tw.angular.z = ramped_vel(prev.angular.z, target.angular.z, t_prev,
t_now, ramps[0])
#根据线加速度修改线速度值
tw.linear.x = ramped_vel(prev.linear.x, target.linear.x, t_prev,
t_now, ramps[1])
return tw
#发送Twist速度指令消息
def send_twist():
global g_last_twist_send_time, g_target_twist, g_last_twist,\
g_vel_scales, g_vel_ramps, g_twist_pub
#获取系统当前时间
t_now = rospy.Time.now()
#参数化修改速度
g_last_twist = ramped_twist(g_last_twist, g_target_twist,
g_last_twist_send_time, t_now, g_vel_ramps)
g_last_twist_send_time = t_now
#发送最终参数化修改后的速度指令消息
g_twist_pub.publish(g_last_twist)
#接受键盘指令
def keys_cb(msg):
global g_target_twist, g_last_twist, g_vel_scales
#判断输入是否是有效指令
if len(msg.data) == 0 or not key_mapping.has_key(msg.data[0]):
return
#获取keys消息中的速度值
vels = key_mapping[msg.data[0]]
#速度参数化,以满足不同速度需求,默认为输入速度的0.1
g_target_twist.angular.z = vels[0] * g_vel_scales[0]
g_target_twist.linear.x = vels[1] * g_vel_scales[1]
#获取用户输入的速度范围参数以及加速度,没有熟度返回默认值
def fetch_param(name, default):
if rospy.has_param(name):
return rospy.get_param(name)
else:
print "parameter [%s] not defined. Defaulting to %.3f" % (name, default)
return default
if __name__ == '__main__':
#节点初始化
rospy.init_node('keys_to_twist')
#获取系统当前时间
g_last_twist_send_time = rospy.Time.now()
#发布速度指令消息
g_twist_pub = rospy.Publisher('cmd_vel', Twist, queue_size=1)
#订阅keys消息
rospy.Subscriber('keys', String, keys_cb)
#声明Twist消息类型
g_target_twist = Twist()
g_last_twist = Twist()
#获取用户输入的参数
g_vel_scales[0] = fetch_param('~angular_scale', 0.1)
g_vel_scales[1] = fetch_param('~linear_scale', 0.1)
g_vel_ramps[0] = fetch_param('~angular_accel', 1.0)
g_vel_ramps[1] = fetch_param('~linear_accel', 1.0)
rate = rospy.Rate(20)
while not rospy.is_shutdown():
send_twist()
rate.sleep()4.rqt_plot生成实时速度图:
安装Matplotlib包:
python -m pip install -U matplotlib 启动key_publisher.py节点
rosrun teleopbot key_publisher.py 打开新的终端,在节点目录启动key_to_twist_with_ramps.py节点,':='语法设置参数的值
./keys_to_twiswith_ramps.py _linear_scale:=0.5 _angular_scale:=0.5 _linear_accel:=1.0 _angular_accel:=1.0 可以新开一个终端窗口将keys消息输出到终端
rostopic echo keys生成实时速度图:
rqt_plot cmd_vel/linear/x cmd_vel/angular/z
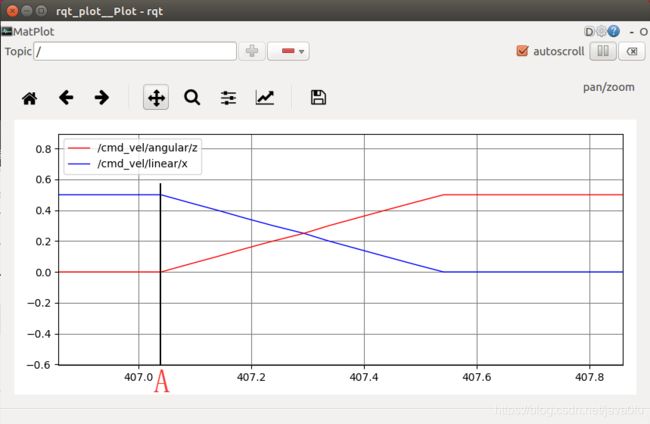
图中,红线表示角速度,蓝线表示线速度,从A点表示一个左转的过程:线速度匀速降低,角速度匀速增加,最大值为0.5,符合输入的参数值,并且两条直线的斜率都为1,同样满足参数的设定。
5.在gazebo中进行仿真,用键盘驱动turtlebot运行:
打开turtlebot_gazebo:
roslaunch turtlebot_gazebo turtlebot_world.launch运行程序:
./keys_to_twist_with_ramps.py cmd_vel:=cmd_vel_mux/input/teleop实现在gazebo中通过键盘控制turtlebot机器人自由移动。